 上位机如何实现控制 上位机需要网络连接吗
上位机如何实现控制 上位机需要网络连接吗
上位机如何实现控制
上位机可以通过和下位机通信来实现控制。下位机根据上位机传递的指令和参数执行具体的控制任务,例如控制机器人的运动、控制电机的转速、调节温度和湿度等。通常,下位机与各种硬件设备集成,例如传感器、执行机构、运动控制器等。上位机通过采集下位机传感器的数据,不断更新控制策略,从而达到控制下位机的目的。同时,上位机可以根据下位机反馈的状态信息和采集的数据进行实时的决策优化,达到增加控制精度和效率的目的。综合来看,上位机通过和下位机通信、数据采集、决策和反馈的方式实现对下位机的控制。
伺服电机上位控制,主要是第一种模式,也就是伺服驱动器工作在放大器模式下,此时,充当上位机的就是PLC,运动控制器以及数控系统。如果把伺服驱动器比喻成发动机,那么上位机就是一套高级的无人驾驶系统。无论采用哪种上位机,上位机和伺服驱动器一般采用脉冲和通讯两种方式。
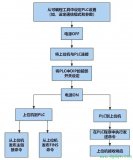
上位机通过发送脉冲到伺服驱动器,来实现控制。在这种方式下,用脉冲频率来控制速度,用脉冲个数来控制位置。同样,伺服驱动器也会发送脉冲数,来告诉上位机,伺服电机的位置和速度。
低端PLC,数控系统,以及各种单片机系统一般都是采用这种模式,简单易行,成本低廉。很显然,当伺服轴数增加,这种控制方式的缺点就会显现出来,上位机硬件成本会增加,配线会很复杂,而且现场EMC不好的话,脉冲极易丢失。所以,这种模式一般是在四轴一下,所以,大部分PLC的脉冲控制轴数都在两轴或是三轴,极少部分PLC可以实现四轴。
上位机需要网络连接吗
上位机不一定需要网络连接,但是网络连接可以使上位机实现更强大的功能,并且在实现远程操作、数据采集和分析等方面有很大的优势。通常,上位机会通过网络连接到下位机、云端数据库或其他企业内部资源,并且可以通过网络控制下位机的状态和参数,从而实现远程操作和管理。
同时,网络连接也可以实现上位机和其他设备之间的数据共享和协同工作,例如将上位机采集的数据分享到其他设备中进行进一步处理和分析。因此,网络连接可以显著提高上位机的效率、灵活性和可操作性。
-
伺服电机
+关注
关注
85文章
2046浏览量
57820 -
上位机
+关注
关注
27文章
941浏览量
54791 -
下位机
+关注
关注
0文章
94浏览量
18753
发布评论请先 登录
相关推荐

上位机与pxi网络连接不上

上位机和下位机是什么意思
上位机是什么?上位机具有哪些特点?上位机能替代PLC实现控制吗?





 工商网监
工商网监
评论