 无惧黑暗强光,纯视觉导航也能全天候作业
无惧黑暗强光,纯视觉导航也能全天候作业
对于一台激光导航扫地机器人而言,全天候作业并非难事,那么纯视觉导航扫地机器人能做到吗?
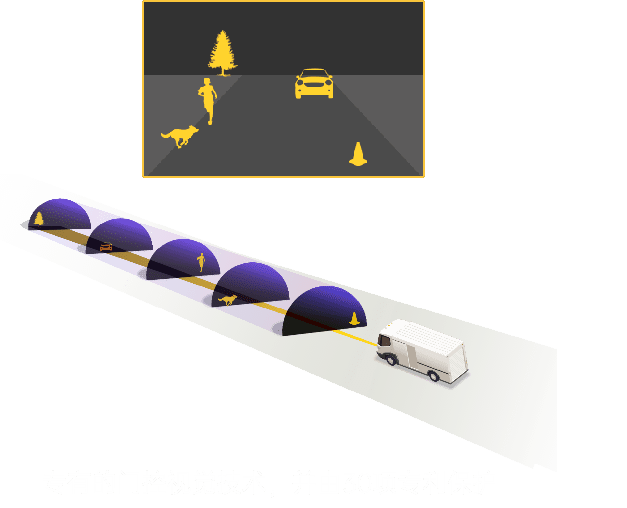
无论对于人,还是机器人,光线环境的变化对“眼睛”的影响都是致命的。由于视觉传感器对于光线十分敏感,在家庭场景中,影响视觉导航效果的不只是黑夜,还有暗光(家居底部)、强光源(太阳光、灯光等)等因素,视觉想要做到洞若观火并非易事。
从市场反馈来看,虽然视觉也是市面上的主流导航方案之一,但其应用产品大多为中低端产品,由于补光威廉希尔官方网站 的缺失或性能不足,扫地机器人一旦遇到光线环境变化,就会导致导航效率大打折扣,甚至出现迷路和乱撞的情况。与此同时,由于这种状况长期没有改观,也导致人们逐渐形成了视觉“不靠谱”的印象。
事实上,解决扫地机器人的光线适应问题即复杂也简单,简单的是提升补光威廉希尔官方网站 即可,复杂的是,提升补光威廉希尔官方网站 并非简单粗暴的加装补光硬件,面对复杂的动态环境,扫地机器人需要的是包含软硬件的整体补光策略。
无惧黑暗强光,全光线自适应
作为国内领先的机器人关键AI威廉希尔官方网站 供应商,INDEMIND在机器人视觉导航方面积累了众多经验。并在推出的「家用机器人AI Kit」家用机器人导航方案中针对光线适应问题专门开发了一套系统化环境补光策略,包含主动式环境补光配置和光照变化条件下的建图策略。
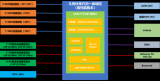
「家用机器人AI Kit」采用INDEMIND面向家用小型机器人专门研发的纯视觉一体化立体视觉模组,搭载自研的INDEMIND OS Lite家用机器人AGI系统,可为家用机器人导航定位、智能避障、路径规划、决策交互等多种核心功能,相较于上一代激光雷达及激光融合方案,在用户体验及性价比上拥有明显提升,可以说是市面上真正意义上的第一款纯视觉导航方案。
为了应对光线适应问题,INDEMIND开发的主动式环境补光配置具备亮度补光及纹理补光两种补光设备(满足人眼安全等级C1等级要求),两种补光灯交替照明,并与视觉传感器曝光时间同步,生成两种独特的视觉图像,分别用于视觉定位及物体识别和立体视觉及建图避障。
在定位方面,实际过程中,黑暗场景(0.1lx)下的亮度补光灯的照明可在5-10m距离范围照亮环境特征,确保机器人能够在黑暗场景下进行有效定位。需要提到的是,「家用机器人AI Kit」已实现了多光线条件下的重定位。
INDEMIND家用机器人AI Kit【重定位】
在黑暗环境避障方面,散斑纹理能够根据环境光亮度进行算法及照度传感器自适应亮度调整,将纹理以合理亮度投射到被照射物体上,并基于立体视觉算法精确解算物体深度,可以有效进行各距离段的物体避障。
INDEMIND家用机器人AI Kit【避障】
为了防止曝光不足或过曝,视觉模组中还具有独立的红外照度传感器,可以自主检测环境光亮度,并据此快速调整两个补光灯亮度。经过实际测试,机器人可以在光照强度低于0.1lx的环境中稳定、可靠运行。
INDEMIND对建图策略也做了多项措施。与激光定位方案不同,双目视觉维护的地图包括视觉特征点云图和障碍物地图(包括类似激光解决方案的环境地图和运行中的避障地图)两种,前者由A帧生成,后者由B帧生成。且为了捕获更多视觉特征点特征,选用了对角FOV>150°的超广角相机,搭配特殊去畸变算法,减少了传感器完全过曝的可能性。
同时,INDEMIND还设计了自动环境教学策略,机器人可依据用户设置、自动清扫时间或光照条件自动启动,将不同光照条件下的特征点补充到特征点云图中。
在其它方面,为了进一步提升建图和避障效果,搭载「家用机器人AI Kit」的扫地机器人在建图和清扫过程中,会运行视觉共识及闭环操作。加上主动补光的策略,可降低光照条件变化对障碍物地图建立的影响,提升不同光学环境下机器人的避障表现。
最后,机器人在工作过程中,还会实时进行传感器标定,包括轮速计、双目相机、IMU等,提升系统精度,同时保证机器人感知空间尺度一致性,以及障碍物地图尺度统一。
显然,这种系统化的环境补光策略,大大提升了机器人的光线适应能力,不仅满足了面对强光直射、无光源、昏暗等特殊光照环境下的无差异工作要求,也为纯视觉导航方案的应用提供了现实基础。
审核编辑黄宇
-
机器人
+关注
关注
211文章
28399浏览量
207005 -
视觉导航
+关注
关注
0文章
31浏览量
7993
发布评论请先 登录
相关推荐
一体化自动气象监测系统:全天候守护,24小时不间断监测

地质灾害监测预警解决方案:准确守护,全天候护航
绿色建筑的守护者:能耗管理系统的全天候监测力量
RFID威廉希尔官方网站 改变阅读方式,24小时智慧书屋让知识无打烊
全天候光伏电站无人机巡检系统

晶科能源打造阿联酋绿色空调标杆:全天候离网系统
雷(4D成像)视融合:具备全天候全天时能力的新选择
vivo WATCH GT智能手表明日发布,具备全天候健康监测与电竞限量版
思特威与主控SoC厂商推出黑光全彩全天候录制解决方案
暗夜精彩如白昼 揭秘黑光全彩全天候录制解决方案

输电线路杆塔倾斜在线监测装置|全天候“舞者”背后的守护者
烟火识别摄像机24小时全天候实时检测火焰烟雾,全面守护小区安全
三星电机推出全天候车规摄像头模组,具备防水涂层与加热功能
友思特新品 | 世界上第一个夜间和全天候摄像的汽车门控视觉系统
北斗三号卫星导航系统采用了哪些先进威廉希尔官方网站 ,你知道吗?





 工商网监
工商网监
评论