 简述FOC电机控制之SVPWM原理(下)
简述FOC电机控制之SVPWM原理(下)
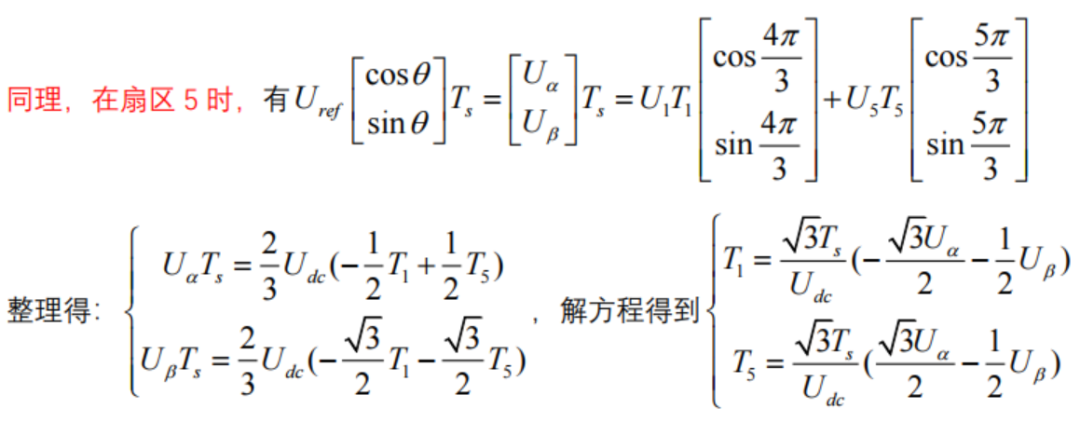
2.3 计算相邻两个基本矢量电压的作用时间:
扇区判断结束后,就是计算相邻两个基本矢量电压的作用时间
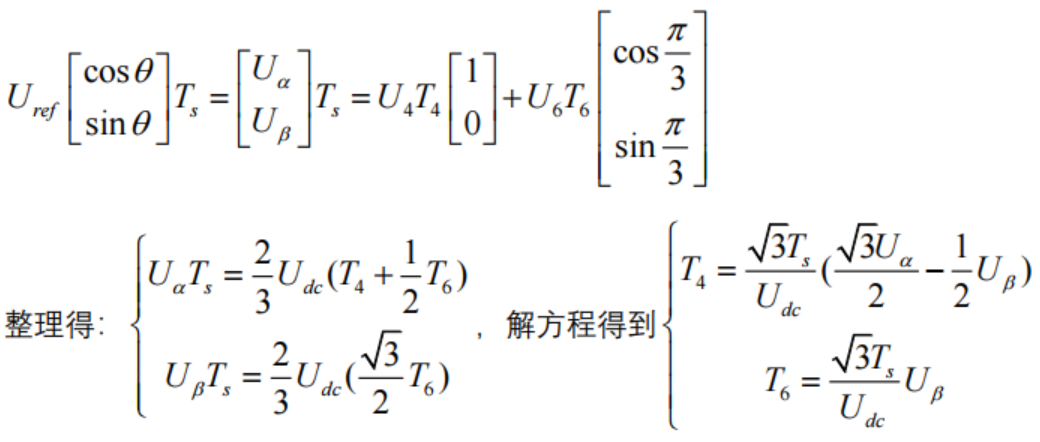
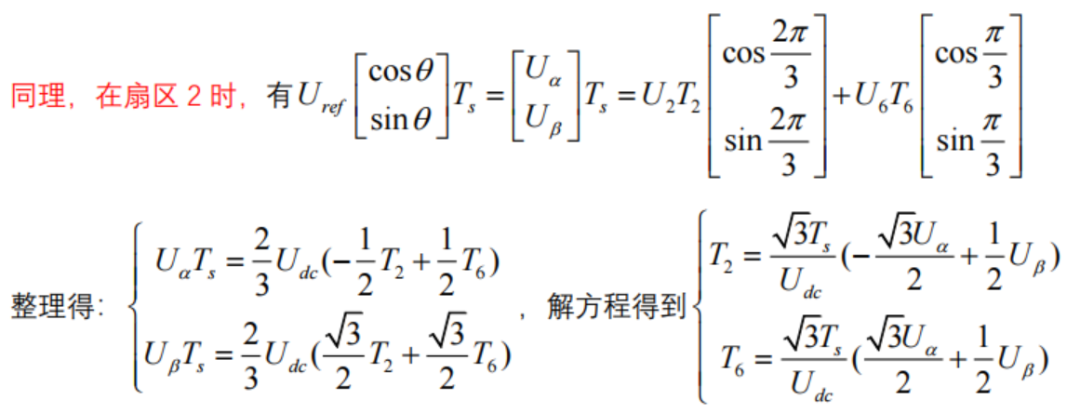
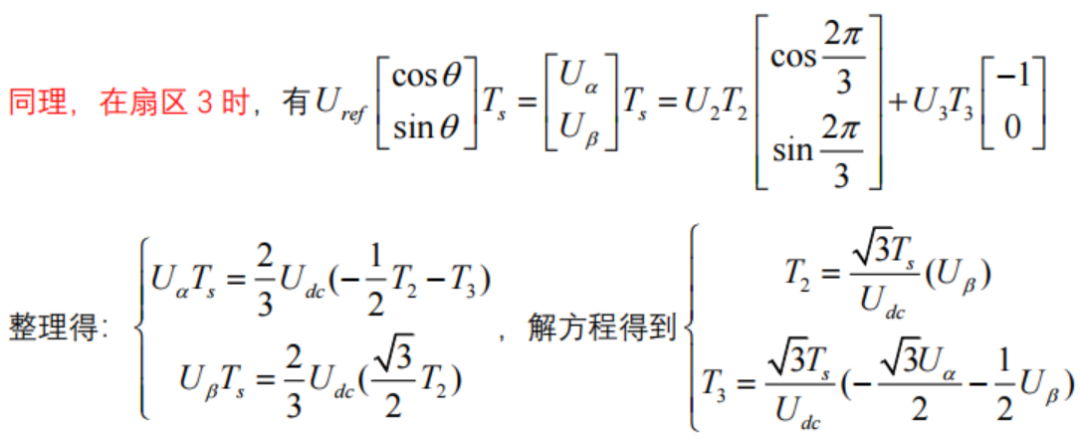
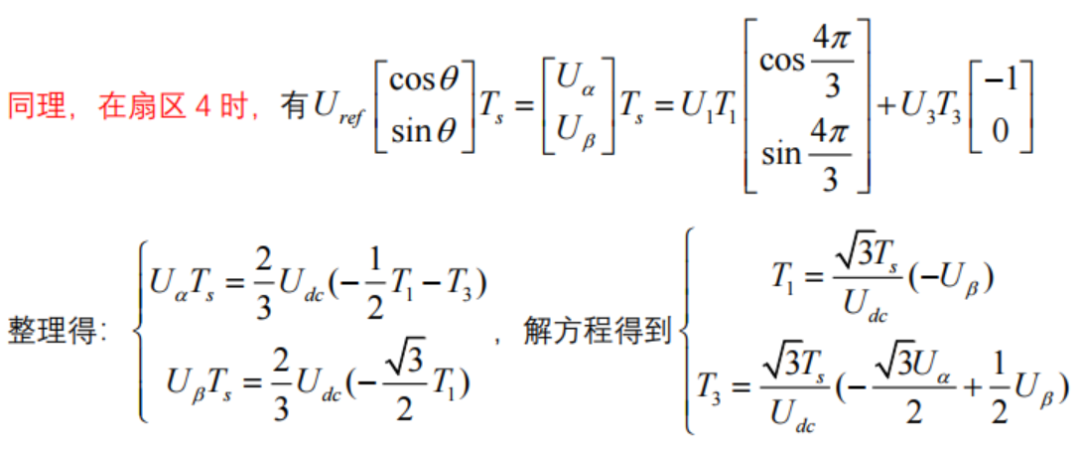
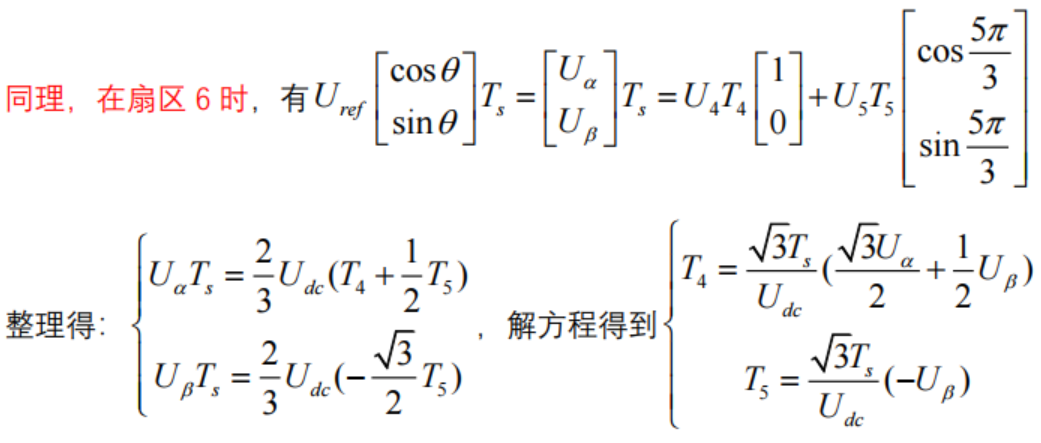
在扇区1时,由U6和U4合成,设在一个时间周期Ts内,U4作用的时间为T4,U6作用的时间为T6。由 基本矢量电压在αβ轴上的投影 和 目标矢量电压在αβ轴上的投影 分别相等建立等式:
到这里,计算出来的公式看着有点复杂,所以我们通过下面的方式稍稍简化一下,记:
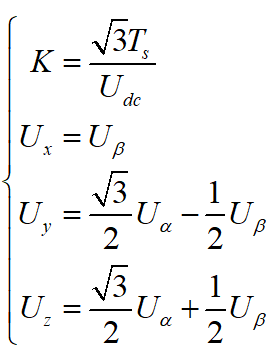
则在各个扇区内的作用时间就分别为:
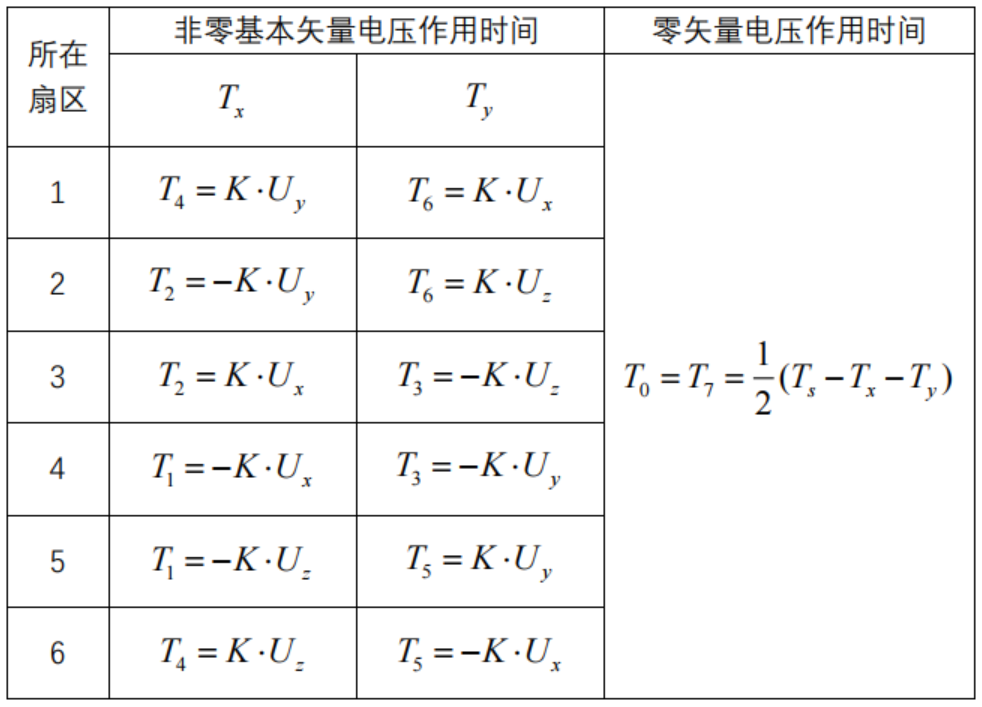
到这里,合成目标矢量电压Uref需要的两个相邻矢量电压Ux,Uy以及分别作用的时间Tx,Ty就计算好了,但这里计算出来的时间不一定刚好满足Tx+Ty=Ts,当Tx+Ty>Ts时需要进行等比例缩小处理,处理方式如下:
当Tx+Ty
2.4 三路PWM占空比计算
目标矢量电压的所在扇区知道了,相邻两个基本矢量电压及其作用时间也知道了,接下来就是7段式SVPWM的生成了。所谓的7段式SVPWM,即在一个周期Ts内,基本电压矢量的作用顺序为
 ,
,
作用的时间分别为:
 。
。
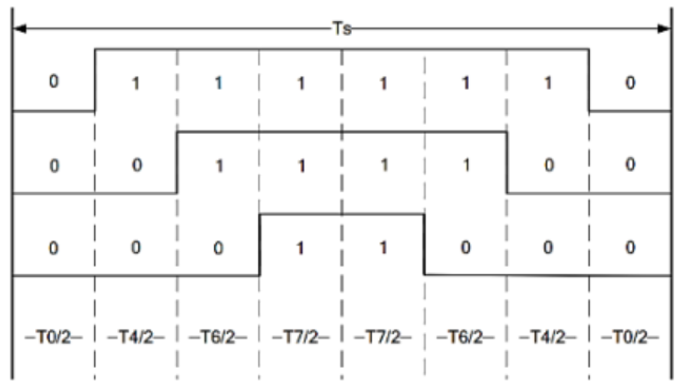
以在第1扇区为例:基本电压矢量作用的顺序为
 ,
,
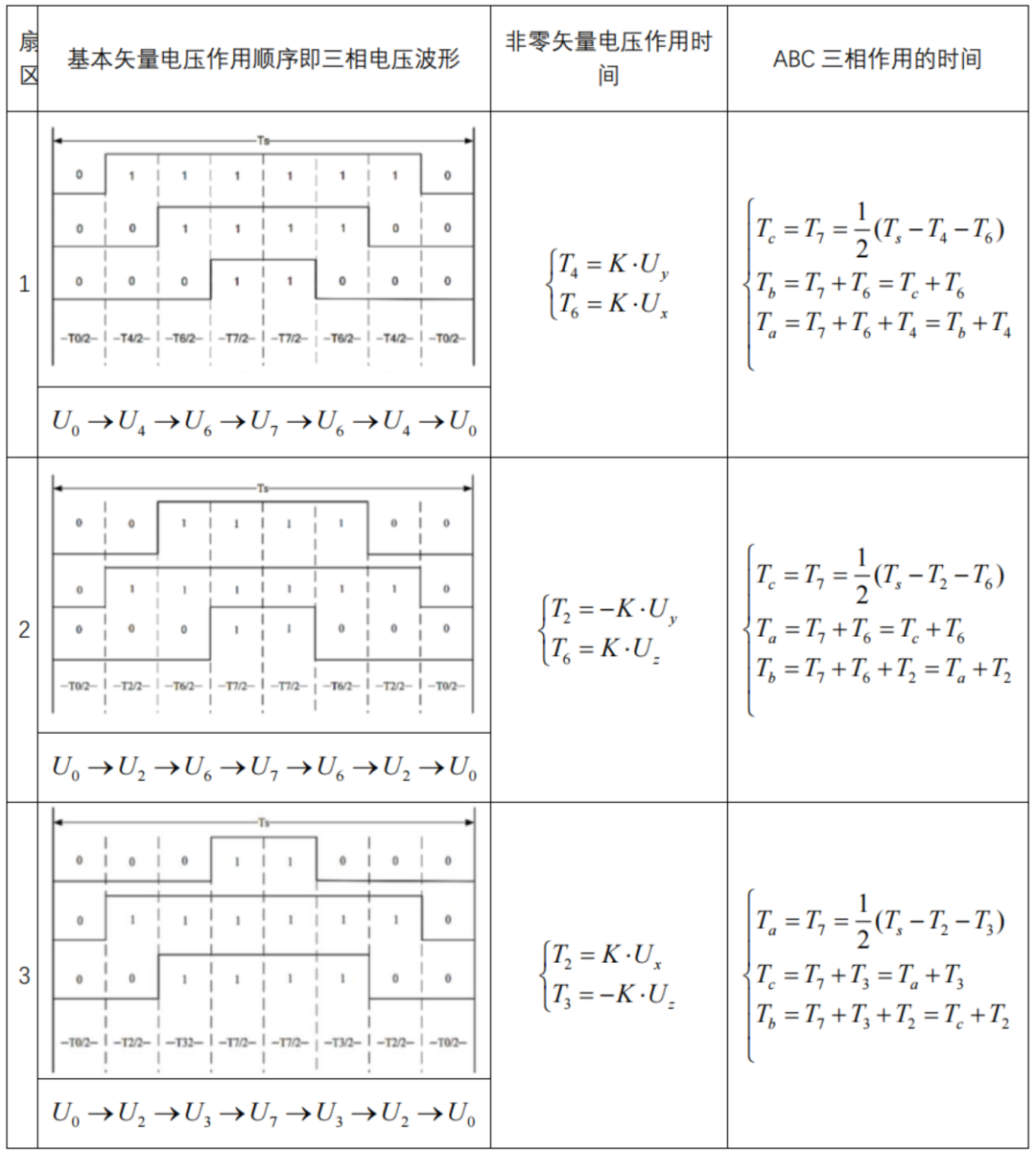
对应的三相电压波形为:
这里,可能会问,Tx,Ty和U4,U6是怎么对应的呢?为什么要先U4再U6呢?把各个扇区的作用顺序竖着列出来就能看出来了:
| 扇区 | U0 | Ux | Uy | U7 | Uy | Ux | U0 |
|---|---|---|---|---|---|---|---|
| 1 | 0 | 4 | 6 | 7 | 6 | 4 | 0 |
| 2 | 0 | 2 | 6 | 7 | 6 | 2 | 0 |
| 3 | 0 | 2 | 3 | 7 | 3 | 2 | 0 |
| 4 | 0 | 1 | 3 | 7 | 3 | 1 | 0 |
| 5 | 0 | 1 | 5 | 7 | 5 | 1 | 0 |
| 6 | 0 | 4 | 5 | 7 | 5 | 4 | 0 |
| 1 | 0 | 4 | 6 | 7 | 6 | 4 | 0 |
可以看出,从一个扇区进入相邻的另一个扇区时,只有一个基本矢量电压发生改变。即通过这样的作用顺序,可以减小开关管的切换次数,从而减少开关损耗,尤其是在负载电流较大时更应该减小开关切换次数。
然后就是根据基本矢量电压的作用时间去计算逆变H桥的占空比了,
仍然先以第1扇区为例:基本矢量电压作用的顺序为

即在一个周期Ts时间内,前面定义的开关函数
S(C)=1的时间为 ,
,
S(B)=1的时间为 ,
,
S(A)=1的时间为 。
。
对应的ABC三路PWM的占空比就分别为 。注意的是,看上面的三相电压波形可知,输出的PWM波时高电平中间对齐,所以在对你所使用的微控制器MCU的PWM定时器进行配置的时候要注意设置好计数方向(一般先向上计数在向下计数)和输出极性(超过阈值为高电平)。
。注意的是,看上面的三相电压波形可知,输出的PWM波时高电平中间对齐,所以在对你所使用的微控制器MCU的PWM定时器进行配置的时候要注意设置好计数方向(一般先向上计数在向下计数)和输出极性(超过阈值为高电平)。
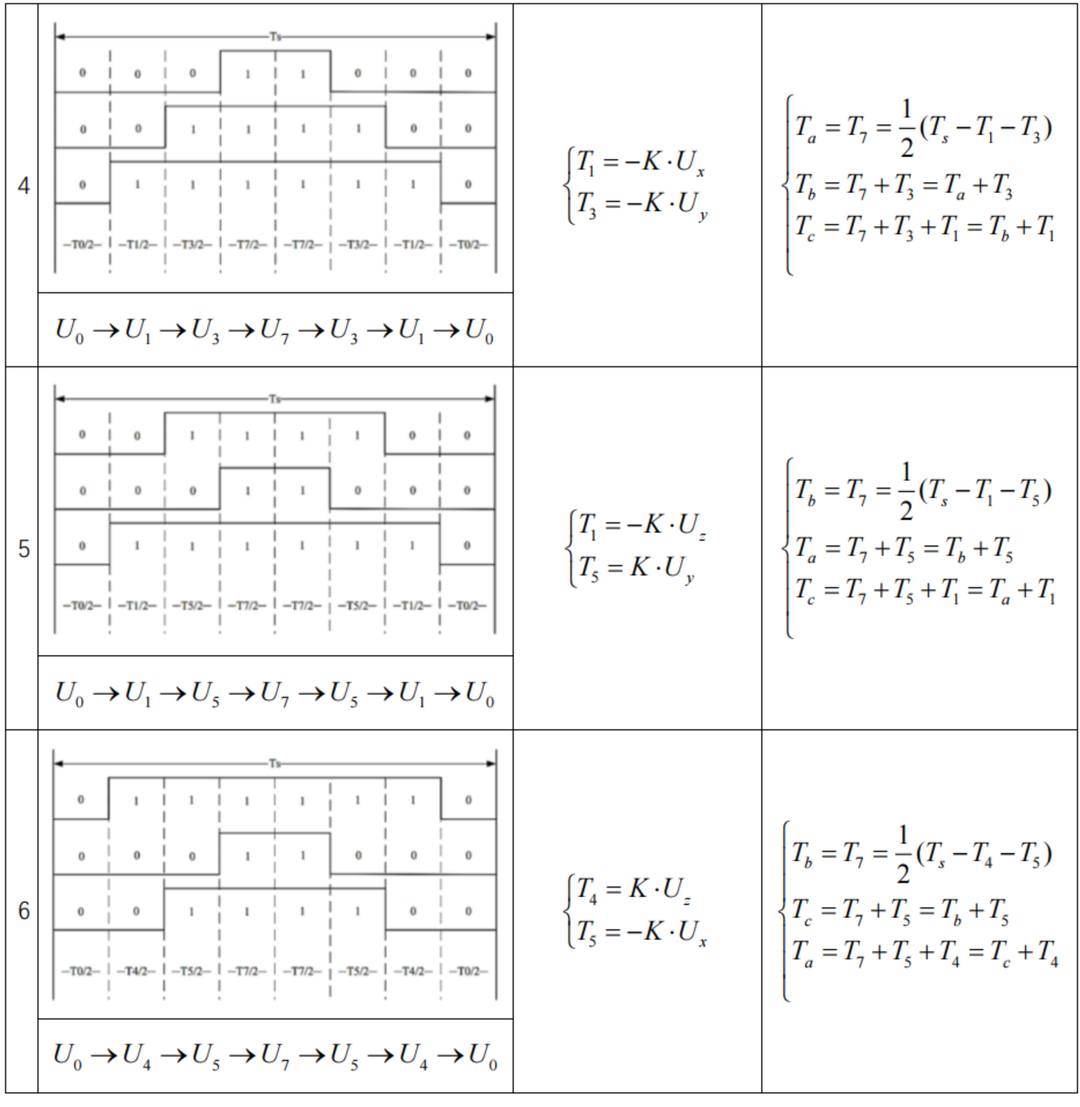
对于其他几个扇区类似,这里不再重复详细叙述,列个表出来
这里说明一下,前面进行Clarke变换和park变换的所有电压电流参数都是标幺值,这里的Uα和Uβ采用的也是标幺值。
我们合成的输出目标矢量电压也用标幺值表示(令Uref_max=1),并令Ts=1时,这里的系数K就等于常数1,这样的话,我们计算的时间Ta,Tb,Tc就等于占空比。下面简单证明一下why。
仍以第1扇区为例:
已知最终的目标矢量电压最大不失真的幅值为 ,
,
则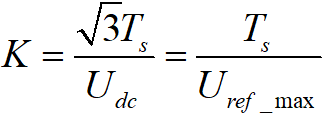 ,我们已经计算的有
,我们已经计算的有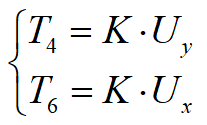 ,
,
即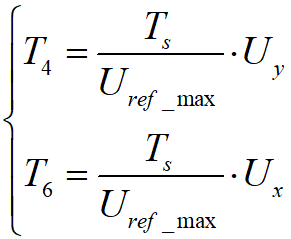 (这里的Ux,Uy已经是标幺值)
(这里的Ux,Uy已经是标幺值)
令Uref_max=1把目标矢量电压标幺值化,再令Ts=1,就可以把非零电压作用的时间转化为标幺值。
所以,我们在程序计算处理的时候,直接令K=1,然后按照上面列表计算出来的Ta,Tb,Tc就可以直接作为占空比了,占空比再乘以PWM定时器的计数周期值,就可以得到比较寄存器的值了,这样计算量就减小很多了,然后就完成了整个SVPWM的操作。
剩下的就是PWM定时器相关的操作了,这里不详说,后面有时间我再针对DSP和STM32这两款处理器做简要介绍。
04.算法流程
接着上一篇的坐标变换(上一篇链接:https://mp.weixin.qq.com/s/4PbY2FbnXcN2ai4aolGVcg)
上篇已经介绍,由park逆变换计算得到Uα,Uβ
step1:扇区判断
计算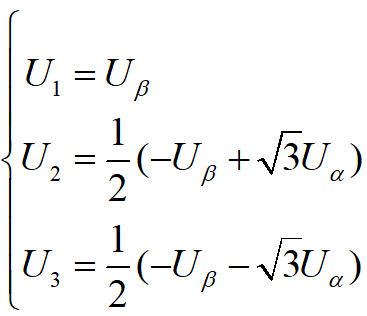 ,根据U1,U2,U3的符号计算N=4C+2B+A,再结合扇区表判断所处的扇区。
,根据U1,U2,U3的符号计算N=4C+2B+A,再结合扇区表判断所处的扇区。
C语言代码示例:
v.U1 = v.Ubeta; \\
v.U2 = ( v.Ualpha*0.8660254) - (v.Ubeta*0.5); \\
v.U3 = (-v.Ualpha*0.8660254) - (v.Ubeta*0.5); \\
v.Sector = 0; \\
if(v.U1 > 0) v.Sector += 1; \\
if(v.U2 > 0) v.Sector += 2; \\
if(v.U3 > 0) v.Sector += 4; \\
step2:计算基本矢量电压作用时间(占空比)
计算 ,并根据扇区确定相邻两个基本矢量电压及其作用时间,然后对作用时间进行等比例缩小处理或引入零矢量电压处理,使得总的作用时间等于Ts,或总的占空比等于1。
,并根据扇区确定相邻两个基本矢量电压及其作用时间,然后对作用时间进行等比例缩小处理或引入零矢量电压处理,使得总的作用时间等于Ts,或总的占空比等于1。
C语言代码示例:
v.Tx = v.Ubeta; \\
v.Ty = ( v.Ualpha*0.8660254) + (v.Ubeta*0.5); \\
v.Tz = (-v.Ualpha*0.8660254) + (v.Ubeta*0.5); \\
switch(v.Sector) \\
{ \\
case 1:{ \\
v.t1=v.Tz; v.t2=v.Ty; \\
if((v.t1+v.t2)>1){ \\
v.t1 = v.t1/(v.t1+v.t2); \\
v.t2 = v.t2/(v.t1+v.t2); \\
} \\
v.Tb = 0.5*(1-v.t1-v.t2); \\
v.Ta = v.Tb + v.t1; \\
v.Tc = v.Ta + v.t2;}break; \\
case 2:{ \\
v.t1=v.Ty; v.t2=-v.Tx; \\
if((v.t1+v.t2)>1){ \\
v.t1 = v.t1/(v.t1+v.t2); \\
v.t2 = v.t2/(v.t1+v.t2); \\
} \\
v.Ta = 0.5*(1-v.t1-v.t2); \\
v.Tc = v.Ta + v.t1; \\
v.Tb = v.Tc + v.t2;}break; \\
case 3:{ \\
v.t1=-v.Tz; v.t2=v.Tx; \\
if((v.t1+v.t2)>1){ \\
v.t1 = v.t1/(v.t1+v.t2); \\
v.t2 = v.t2/(v.t1+v.t2); \\
} \\
v.Ta = 0.5*(1-v.t1-v.t2); \\
v.Tb = v.Ta + v.t1; \\
v.Tc = v.Tb + v.t2;}break; \\
case 4:{ \\
v.t1=-v.Tx; v.t2=v.Tz; \\
if((v.t1+v.t2)>1){ \\
v.t1 = v.t1/(v.t1+v.t2); \\
v.t2 = v.t2/(v.t1+v.t2); \\
} \\
v.Tc = 0.5*(1-v.t1-v.t2); \\
v.Tb = v.Tc + v.t1; \\
v.Ta = v.Tb + v.t2;}break; \\
case 5:{ \\
v.t1=v.Tx; v.t2=-v.Ty; \\
if((v.t1+v.t2)>1){ \\
v.t1 = v.t1/(v.t1+v.t2); \\
v.t2 = v.t2/(v.t1+v.t2); \\
} \\
v.Tb = 0.5*(1-v.t1-v.t2); \\
v.Tc = v.Tb + v.t1; \\
v.Ta = v.Tc + v.t2;}break; \\
case 6:{ \\
v.t1=-v.Ty; v.t2=-v.Tz; \\
if((v.t1+v.t2)>1){ \\
v.t1 = v.t1/(v.t1+v.t2); \\
v.t2 = v.t2/(v.t1+v.t2); \\
} \\
v.Tc = 0.5*(1-v.t1-v.t2); \\
v.Ta = v.Tc + v.t1; \\
v.Tb = v.Ta + v.t2;}break; \\
step3:计算PWM定时器比较寄存器值
这个很简单,就是用占空比乘以定时器的计数周期
C语言代码如下:
EPwm1Regs.CMPA.half.CMPA = (int16)(MPeriod * Svpwm1.Ta);
EPwm2Regs.CMPA.half.CMPA = (int16)(MPeriod * Svpwm1.Tb);
EPwm3Regs.CMPA.half.CMPA = (int16)(MPeriod * Svpwm1.Tc);
-
电压
+关注
关注
45文章
5602浏览量
115738 -
SVPWM
+关注
关注
14文章
614浏览量
90608 -
FOC
+关注
关注
20文章
322浏览量
42807
发布评论请先 登录
相关推荐

必学的BLDC电机控制算法——FOC简述
深入浅出讲解FOC算法与SVPWM威廉希尔官方网站
FOC电机控制相关资料下载
实现电机SVPWM旋转的FOC频率大概是多少
手把手教你无感FOC电机控制,MATLAB代码生成
简述FOC电机控制之SVPWM原理(上)
电机foc是什么意思 svpwm和foc的区别
电机控制---SVPWM扇区判断的实现以及推导过程

电机控制--FOC的优势
BLDC电机控制算法之FOC简述






 工商网监
工商网监
评论