 Cortex-M0中断控制和系统控制知识点
Cortex-M0中断控制和系统控制知识点
上一篇介绍了Cortex-M0中断控制和系统控制(一),本篇将继续介绍Cortex-M0中断控制知识。
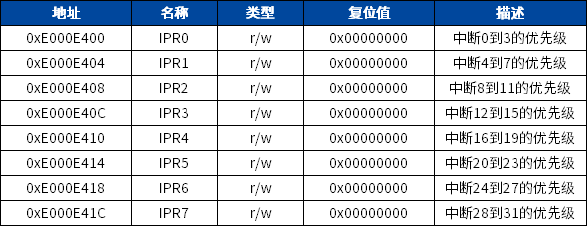
每一个外部中断都有一个对应的优先级寄存器,Cortex-M0中NVIC-IPR共有8个寄存器,而每个寄存器管理4个IRQ中断,所以M0的IRQ中断源最多只支持32个,再加上16个内核中断,也就是说M0最多48个中断源。
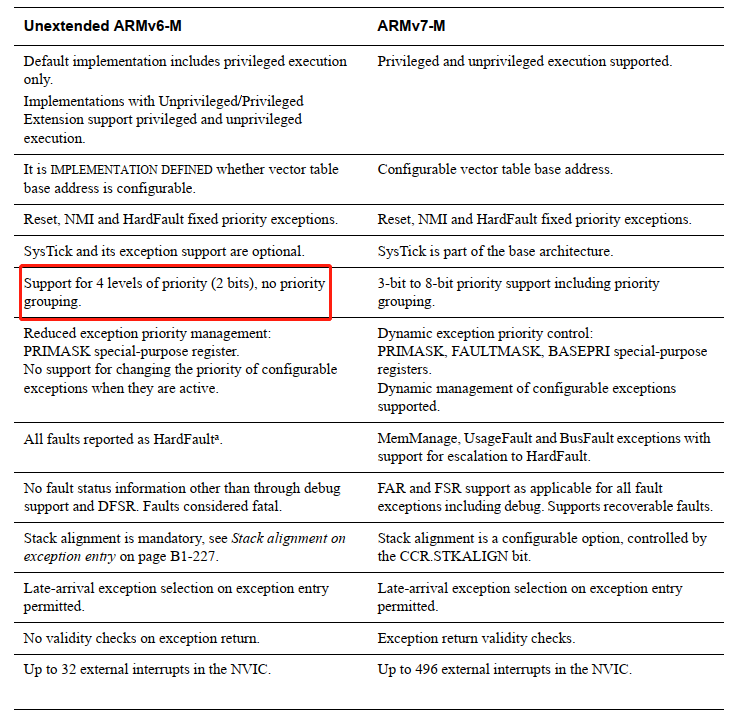
Cortex-M0采用Armv6-M架构,优先级寄存器配置位有8位,但是有效位只有最高2位,这个地方很多人使用了Cortex-M3后一直也认为Cortex-M0也是最高3或4位有效位,在arm官方资料中有对比两个版本的差别。因此Cortex-M0可编程优先级有4个,加上3个固定的优先级(复位、NMI、HardFault),Cortex-M0总共有7个中断优先级。
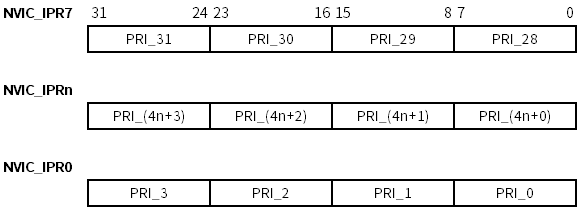
Cortex-M0内核的中断优先级寄存器是以最高位(MSB)对齐的,并且只支持字传输,每次访问都会同时涉及4个中断优先级寄存器。见下图:

因为Bit0 - Bit5没有使用,所以如果没有进行写操作读出都为0。
由于不同的 Cortex-M 系列,其中断优先级是不一样的,所以在 CMSIS 库中的头文件中可以查看优先级的数量 \_\_NVIC\_PRIO\_BITS。
中断优先级寄存器的编程应该在中断使能之前,其通常是在程序开始时完成的。arm官方资料提示应该避免在中断使能之后改变中断优先级,因为这种情况的结果在ARMv6-M系统结构是不可预知的,并且不被Cortex-M0处理器支持。Cortex-M3/M4处理器的情况又有所不同,他们都支持中断优先级的动态切换。Cortex-M3处理器和Cortex-M0处理器的另外一个区别是,Cortex-M3访问中断优先级寄存器时支持字节或半字传输,因此可以每次只设置一个寄存器。如果需要改变优先级,程序中需要关闭中断后再重新设置中断优先级寄存器。
在 Cortex-M内核中,一个中断的优先级数值越低,逻辑优先级却越高。比如,中断优先级为2的中断可以抢占中断优先级为3的中断,但反过来就不行。换句话说,中断优先级2比中断优先级3的优先级更高。
Cortex-M0处理器对中断嵌套的支持无需任何软件干预,如果MCU已经在运行一个中断,而有了新的更高优先级的中断请求,正在运行的中断将会被暂停,转而执行更高优先级的中断,高优先级中断执行完成后又回到原来的低优先级中断。如果出现两个同一优先级的中断,则是判断谁开始发起中断请求,MCU会先执行同一优先级中首先发起请求的中断。
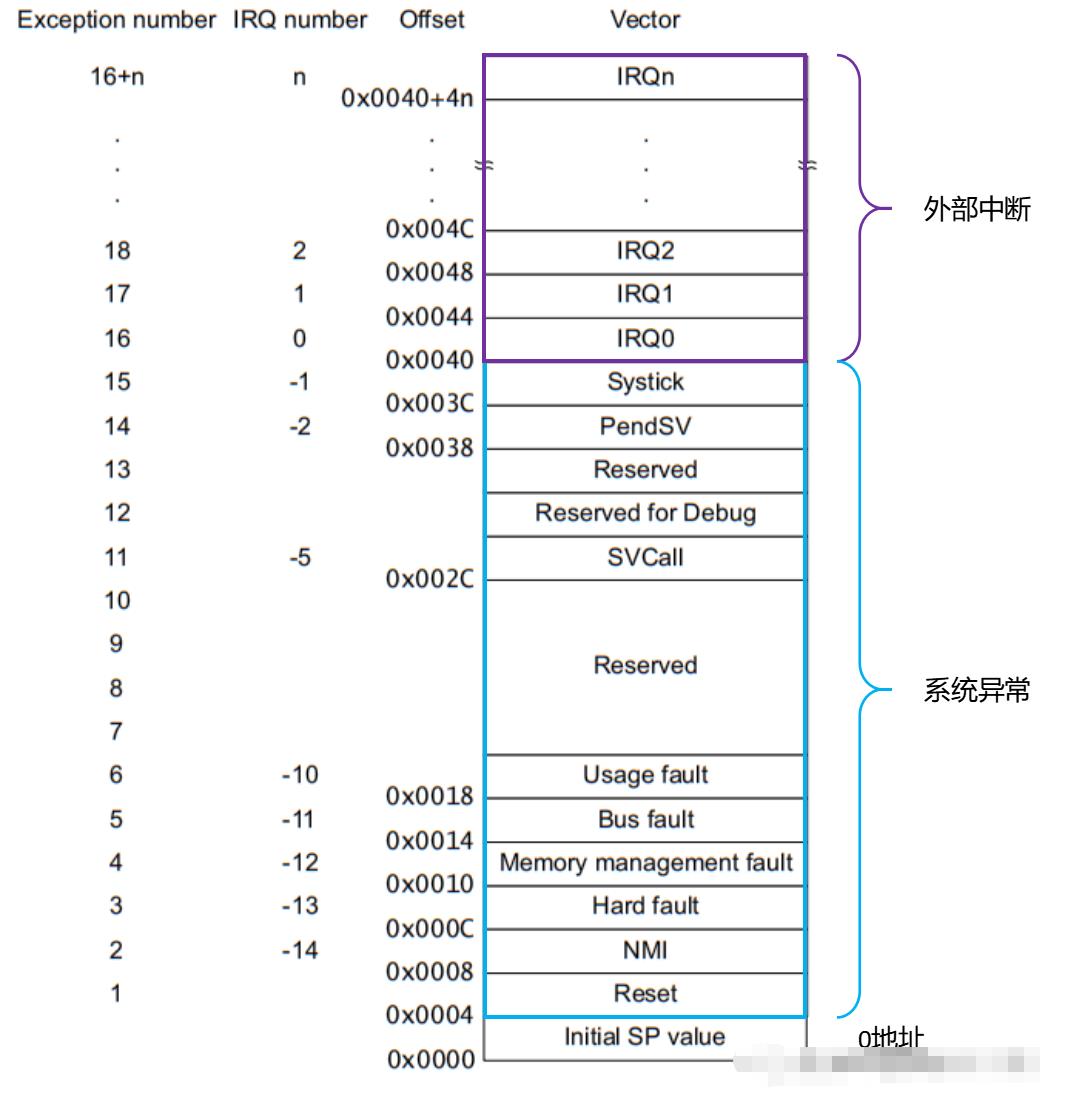
MM32F0130系列中断向量表:
typedefenumIRQn{
NonMaskableInt_IRQn=-14,///< 2 Non Maskable Interrupt
HardFault_IRQn = -13, ///< 3 Cortex-M0 Hard Fault Interrupt
MemoryManagement_IRQn = -12, ///< 4 Cortex-M0 Memory Management Interrupt
BusFault_IRQn = -11, ///< 5 Cortex-M0 Bus Fault Interrupt
UsageFault_IRQn = -10, ///< 6 Cortex-M0 Usage Fault Interrupt
SVC_IRQn = -5, ///< 11 Cortex-M0 SV Call Interrupt
DebugMonitor_IRQn = -4, ///< 12 Cortex-M0 Debug Monitor Interrupt
PendSV_IRQn = -2, ///< 14 Cortex-M0 Pend SV Interrupt
SysTick_IRQn = -1, ///< 15 Cortex-M0 System Tick Interrupt
WWDG_IWDG_IRQn = 0, ///< WatchDog Interrupt
WWDG_IRQn = 0, ///< Window WatchDog Interrupt
PVD_IRQn = 1, ///< PVD through EXTI Line detect Interrupt
BKP_IRQn = 2, ///< BKP through EXTI Line Interrupt
RTC_IRQn = 2, ///< RTC through EXTI Line Interrupt
FLASH_IRQn = 3, ///< FLASH Interrupt
RCC_CRS_IRQn = 4, ///< RCC & CRS Interrupt
RCC_IRQn = 4, ///< RCC Interrupt
EXTI0_1_IRQn = 5, ///< EXTI Line 0 and 1 Interrupts
EXTI2_3_IRQn = 6, ///< EXTI Line 2 and 3 Interrupts
EXTI4_15_IRQn = 7, ///< EXTI Line 4 to 15 Interrupts
HWDIV_IRQn = 8, ///< HWDIV Global Interrupt
DMA1_Channel1_IRQn = 9, ///< DMA1 Channel 1 Interrupt
DMA1_Channel2_3_IRQn = 10, ///< DMA1 Channel 2 and Channel 3 Interrupts
DMA1_Channel4_5_IRQn = 11, ///< DMA1 Channel 4 and Channel 5 Interrupts
ADC_COMP_IRQn = 12, ///< ADC & COMP Interrupts
COMP_IRQn = 12, ///< COMP Interrupts
ADC_IRQn = 12, ///< ADC Interrupts
ADC1_IRQn = 12, ///< ADC Interrupts
TIM1_BRK_UP_TRG_COM_IRQn = 13, ///< TIM1 Break, Update, Trigger and Commutation Interrupts
TIM1_CC_IRQn = 14, ///< TIM1 Capture Compare Interrupt
TIM2_IRQn = 15, ///< TIM2 Interrupt
TIM3_IRQn = 16, ///< TIM3 Interrupt
TIM14_IRQn = 19, ///< TIM14 Interrupt
TIM16_IRQn = 21, ///< TIM16 Interrupt
TIM17_IRQn = 22, ///< TIM17 Interrupt
I2C1_IRQn = 23, ///< I2C1 Interrupt
SPI1_IRQn = 25, ///< SPI1 Interrupt
SPI2_IRQn = 26, ///< SPI1 Interrupt
UART1_IRQn = 27, ///< UART1 Interrupt
UART2_IRQn = 28, ///< UART2 Interrupt
CAN_IRQn = 30, ///< CAN Interrupt
USB_IRQn = 31, ///< USB Interrupt
} IRQn_Type;
设置中断优先级的流程:先读一个字,再修改对应字节,最后整个字写回。
1.1. C代码
void__NVIC_SetPriority()
{
unsignedlongtemp;//定义一个临时变量
temp=*(volatileunsignedlong)(0xE000E400);//读取IRP0值
temp&=(0xFF00FFFF|(0xC0<< 16)); //修改中断#2优先级为0xC0
*(volatile unsigned long)(0xE000E400) = temp; //设置IPR0
}
1.2. 汇编代码
在程序中可以一次设置多个中断优先级。
void__NVIC_SetPriority()
{
LDRR0,=0xE000E100;//设置使能中断寄存器地址
MOVSR1,#0x4;//中断#2
STRR1,[R0];//使能#2中断
LDRR0,=0xE000E200;//设置挂起中断寄存器地址
MOVSR1,#0x4;//中断#2
STRR1,[R0];//挂起#2中断
LDRR0,=0xE000E280;//设置清除中断挂起寄存器地址
MOVSR1,#0x4;//中断#2
STRR1,[R0];//清除#2的挂起状态
}
1.3. CMSIS标准设备驱动函数
//设置中断优先级 __STATIC_INLINEvoid__NVIC_SetPriority(IRQn_TypeIRQn,uint32_tpriority) { if((int32_t)(IRQn)>=0){ NVIC->IP[_IP_IDX(IRQn)]=((uint32_t)(NVIC->IP[_IP_IDX(IRQn)]&~(0xFFUL<< _BIT_SHIFT(IRQn))) | (((priority << (8U - __NVIC_PRIO_BITS)) & (uint32_t)0xFFUL) << _BIT_SHIFT(IRQn))); } else { SCB->SHP[_SHP_IDX(IRQn)]=((uint32_t)(SCB->SHP[_SHP_IDX(IRQn)]&~(0xFFUL<< _BIT_SHIFT(IRQn))) | (((priority << (8U - __NVIC_PRIO_BITS)) & (uint32_t)0xFFUL) << _BIT_SHIFT(IRQn))); } }
这里的参数IRQn为中断ID号,可以为负,也可以为正。当IRQn为负时,设置系统异常的优先级,当IRQn大于等于0时,设置外设中断优先级,芯片厂商会提供中断向量表IRQn\_Type,应用层只需要调用即可;priority是0、1、2、3,函数内部会自动移位到对应的优先级最高2位。
方法一: voidNVIC_SetPriority(TIM1_CC_IRQn,3);//设置#14中断的优先级为0xC0 方法二: voidNVIC_Config(void) {NVIC_InitTypeDefNVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel=TIM1_CC_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority=3; NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE; NVIC_Init(&NVIC_InitStructure); }
设置好中断优先级后,用户还可以读取当前已经设置的中断优先级。
审核编辑:汤梓红
-
处理器
+关注
关注
68文章
19265浏览量
229671 -
寄存器
+关注
关注
31文章
5336浏览量
120249 -
内核
+关注
关注
3文章
1372浏览量
40282 -
中断
+关注
关注
5文章
898浏览量
41474 -
Cortex-M0
+关注
关注
4文章
124浏览量
38675
原文标题:Cortex-M0中断控制和系统控制(二)
文章出处:【微信号:Ithingedu,微信公众号:安芯教育科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
灵动微课堂 (第175讲) | Cortex-M0中断控制和系统控制(一)
灵动微课堂 (第176讲) | Cortex-M0中断控制和系统控制(二)
灵动微课堂 (第177讲) | Cortex-M0中断控制和系统控制(三)
灵动微课堂 (第178讲) | Cortex-M0中断控制和系统控制(四)
灵动微课堂 (第180讲) | Cortex-M0中断控制和系统控制(六)
基于Cortex-M0中断系统的IP集成与中断服务函数设计
恩智浦推出基于Cortex-M0微控制LPC1100微控制器

Cortex-M0中断控制和系统控制(四)

Cortex-M0中断控制和系统控制(二)





 工商网监
工商网监
评论