 工业机器人的组成、分类及其工作原理分别是什么?
工业机器人的组成、分类及其工作原理分别是什么?
一、工业机器人组成
主体 – 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;

驱动系统 – 包括动力装置和传动机构,核心为减速器以及伺服电机,用以使执行机构产生相应的动作;
控制系统 – 是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
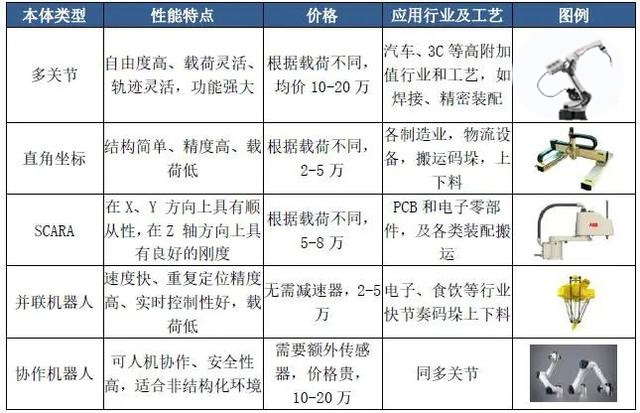
二、工业机器人分类
关于工业机器人的分类,国际上没有指定统一的标准,可按负载重量、控制方式、自由度、结构、应用领域等划分。
按照结构形态分类如下:
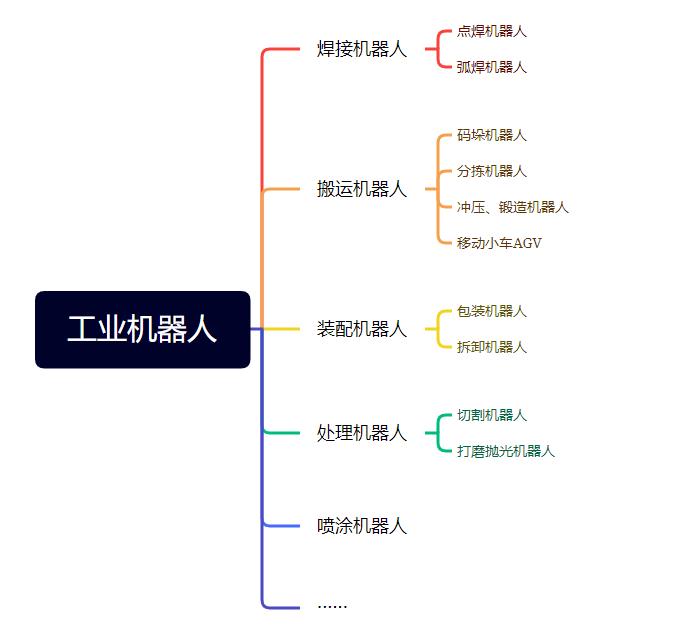
按照应用分类可以分为:焊接机器人、切割机器人、喷涂机器人、搬运机器人、装配机器人、打磨机器人。
三、工业机器人工作原理
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。
从控制的角度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。江苏无锡专业工业机器人集成商,金红鹰生产的机器人所用的工作方式多为示教再现和编程控制两种,市场上大多数工业机器人都是按照这两种方式工作的。
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
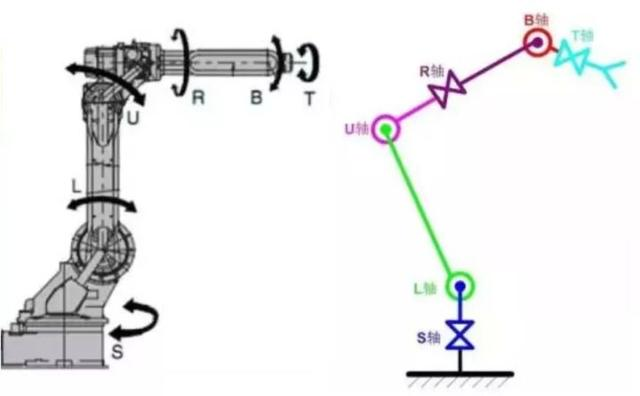
以六轴垂直多关节机器人为例(如下图),通过机器人控制器及其控制系统,可实现S轴回旋,L轴下臂倾动,U轴上臂倾动,R轴手臂横摆,B轴手腕俯仰以及T轴的手腕回旋,实现六个轴的动作操作与配合。
审核编辑黄宇
-
机器人
+关注
关注
211文章
28399浏览量
207003
发布评论请先 登录
相关推荐

焊接机器人六个轴分别是什么作用

语音识别机器人的工作原理
工业机器人分类的关键因素是什么?有哪几类?

巡线机器人电路图 巡线机器人的工作原理和应用领域
码垛机器人的组成和工作原理
abb工业机器人的编程语言是什么
并联机器人和串联机器人的区别是什么?
工业机器人连接解决方案

焊接机器人的工作原理与优势分析







 工商网监
工商网监
评论