
 Delta并联机械臂实现电磁铁搬运功能
Delta并联机械臂实现电磁铁搬运功能
1. 功能说明
R037样机是一款Delta并联机械臂。本文示例将利用Delta并联机械臂实现不同点定点搬运磁铁物料的效果。
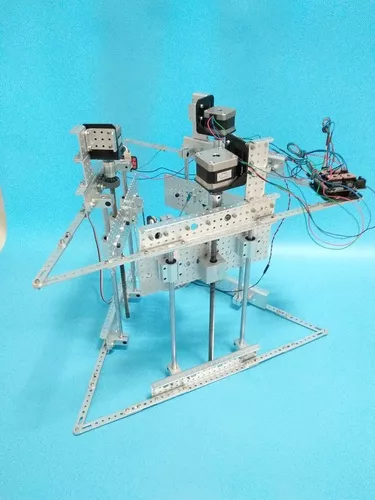
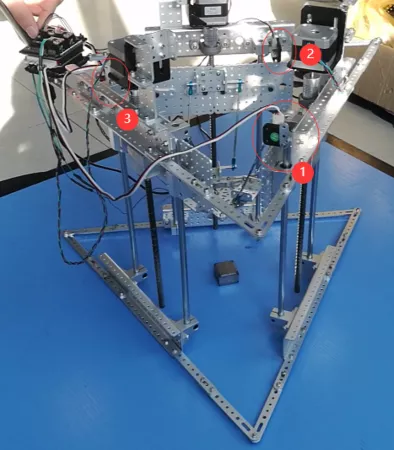
2. 结构说明
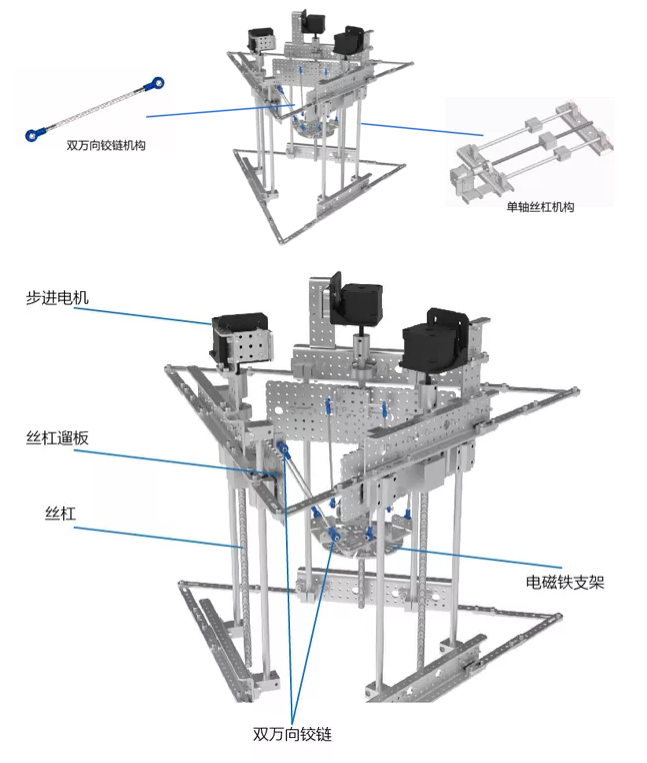
Delta并联机械臂,其驱动系统采用精度较高的42步进电机;传动系统为丝杠和万向球节;执行末端为搭载电磁铁的圆盘支架。
3. Delta机械臂运动学算法
这里给大家介绍一种Delta并联机械臂的运动轨迹解法,通过控制电机的转动参数,最终求解出电磁铁圆盘支架的运动轨迹规律,样机采用R037b
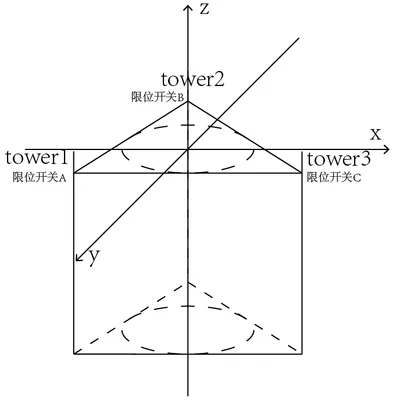
该机械臂由3个丝杠平台构成,通过并联的方式同时控制同一个端点的运动;三个丝杠位于一个正三角形边线的中心位置,连杆采用球头万向节连杆结构。
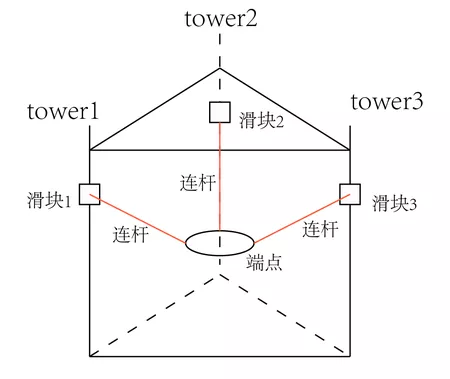
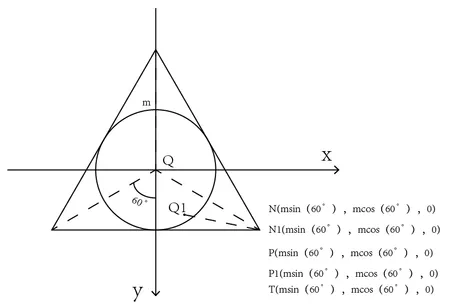
① 首先我们建立一个空间直角坐标系,该直角坐标系以三个丝杠平台在俯视图方向投影的内切圆心为原点,x轴与tower1和tower3之间的连线平行,y轴过tower2,其中z=0的平面设置在三个限位开关所在平面。
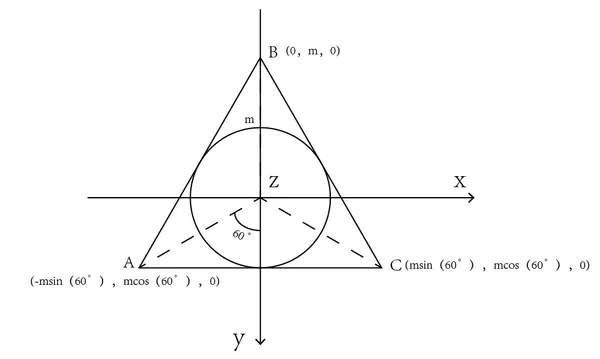
② 建立坐标系之后,我们可以得出3个限位开关Z轴投影的坐标为A=(-msin(60°),mcos(60°),0);B=(0,m,0);C=(msin(60°),mcos(60°),0);其中m为在xy投影面上正三角形的内切圆心到B点的距离。
③确定各限位开关的位置(即确定各丝杠平台上滑块的初始位置),丝杠平台的运动可简化为如下:【其中N点为滑块初始位置,Q点为端点初始位置,P为Q点在丝杠平台上Z轴的投影;N1,P1,Q1点为丝杠平台运动后的位,T点为某一固定点,假设为delta机械臂上端点在Z向可以运动的最大值在丝杠平台Z向的投影点】
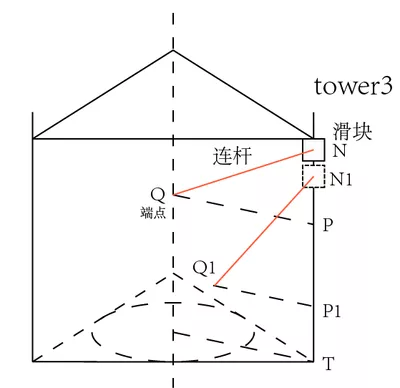
④逆运动学是根据Q1点的位置确定NN1的距离。
在图中有几个可以通过测量得到已知值,分别是连杆长度NQ/N1Q1、NT的距离、终点Q1点的坐标;假设我们输入的量是终点Q1的坐标(X1,Y1,Z1);这里需要注意的是Z1坐标为负值,为了方便理解在后面的推导中我们都对Z1取绝对值。
我们需要计算的是NN1的距离:

其中Q1的Z坐标与P1的Z坐标一致,所以NP1为已知量为Q1的Z坐标值Z1,即可以将上面的公式改为:

这里我们只需要计算出N1P1的值即可:
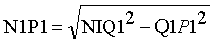
其中NIQ1为连杆长度,可通过测量得知,所以这里面需要我们计算出Q1P1。
⑤求出Q1P1:【该长度我们可以通过两点坐标距离公式得出,借助俯视图投影进行计算】
为方便计算Q1P1,图中我们将N,N1,P,P1,T点都投影到Z为0的点,则Q1(X1,Y1,0)。
根据点坐标公式可得:

综上所述:

注意前面我们对Z1取了一次绝对值,实际Z1为负值,
所以最终推导公式为:

这样我们就求出了NN1(丝杠移动距离)与Q1(执行端运动的终点)坐标的关系。
4. 功能实现
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| SH-ST扩展板 | |
| 传感器 | 触碰传感器 |
| 电机 | 步进电机 |
| 电池 | 11.1v动力电池 |
| 其它 | 电磁铁、USB线 |
4.2 电路连接说明
① 硬件连接-电子元件

各轴步进电机与SH-ST步进电机扩展板的接线顺序如下(从上至下):
X:红蓝黑绿
Y:红蓝黑绿
Z:黑绿红蓝
② 硬件连接-限位传感器
各个轴的限位传感器(触碰)与Bigfish扩展板的接线如下:
X:A0
Y:A3
Z:A4
③ 电磁铁连在Bigfish扩展板的D5、D6接口上。
4.3 编写程序
编程环境:Arduino 1.8.19
Delta机械臂有两种运动方式:第一种是自动运行搬运;第二种是用电脑发送指令,然后再根据指令运动。
这里仅列出Delta机械臂自动运行搬运(Delta.ino)的程序:【其它的程序源码详见 https://www.robotway.com/h-col-194.html 获取】
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-02-08 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ #include "Arduino.h" #include #include #include "Configuration.h" AccelStepper stepper_x(1, 2, 5); //tower1 AccelStepper stepper_y(1, 3, 6); //tower2 AccelStepper stepper_z(1, 4, 7); //tower3 //AccelStepper stepper_a(1, 12, 13); MultiStepper steppers; float delta[NUM_STEPPER]; float cartesian[NUM_AXIS] = {0.0, 0.0, 0.0}; //当前坐标 float destination[NUM_AXIS]; //目标坐标 boolean dataComplete = false; float down = -111; float up = -105; /*********************************************Main******************************************/ void setup() { Serial.begin(9600); pinMode(EN, OUTPUT); steppers.addStepper(stepper_x); steppers.addStepper(stepper_y); steppers.addStepper(stepper_z); stepperSet(1600, 400.0); stepperReset(); delay(1000); Get_command(0, 0, down); Process_command(); delay(1000); } void loop() { float r = 25; float x1 = 0.0; float y1 = 0.0; Get_command(25, 0, down); Process_command(); delay(1000); for(int i=0;i<2;i++){ for(float i=0.0;i<=360;i+=10){ x1 = r * cos(i / 180 * 3.141592); y1 = r * sin(i / 180 * 3.141592); Get_command(x1, y1, down); Process_command(); } } delay(1000); for(int j=0;j<2;j++){ for(float i=360.0;i>=0;i-=10){ x1 = r * cos(i / 180 * 3.141592); y1 = r * sin(i / 180 * 3.141592); Get_command(x1, y1, down); Process_command(); } } delay(1000); Get_command(0, 0, down); Process_command(); test(); delay(1000); stepperReset(); delay(1000); } /***************************************Get_commond*******************************************/ void Get_command(float _dx, float _dy, float _dz){ destination[0] = _dx; destination[1] = _dy; destination[2] = _dz; if(destination[0] == 0 && destination[1] == 0 && destination[2] == 0){ stepperReset(); } else { dataComplete = true; } if(serial_notes){ Serial.print("destinationPosition: "); Serial.print(destination[0]); Serial.print(" "); Serial.print(destination[1]); Serial.print(" "); Serial.println(destination[2]); } } /***************************************Process_command***************************************/ void Process_command(){ if(dataComplete){ digitalWrite(EN, LOW); if(cartesian[0] == destination[0] && cartesian[1] == destination[1] && cartesian[2] == destination[2]){ return; } else { Line_DDA(destination[0], destination[1], destination[2]); } } dataComplete = false; digitalWrite(EN, HIGH); } /************************************************** DDA ************************************************/ void Line_DDA(float x1, float y1, float z1) { float x0, y0, z0; // 当前坐标点 float cx, cy; // x、y 方向上的增量 x0 = cartesian[0];y0 = cartesian[1];z0 = cartesian[2]; int steps = abs(x1 - x0) > abs(y1 - y0) ? abs(x1 - x0) : abs(y1 - y0); cx = (float)(x1 - x0) / steps; cy = (float)(y1 - y0) / steps; for(int i = 0; i <= steps; i++) { cartesian[0] = x0 - cartesian[0]; cartesian[1] = y0 - cartesian[1]; cartesian[2] = z1 - cartesian[2]; calculate_delta(cartesian); stepperSet(1350.0, 50.0); stepperMove(delta[0], delta[1], delta[2]); cartesian[0] = x0; cartesian[1] = y0; cartesian[2] = z1; x0 += cx; y0 += cy; if(serial_notes){ Serial.print("currentPosition: "); for(int i=0;i<3;i++){ Serial.print(cartesian[i]); Serial.print(" "); } Serial.println(); Serial.println("-------------------------------------------------"); } } } /***************************************calculateDelta****************************************/ void calculate_delta(float cartesian[3]) { if(cartesian[0] == 0 && cartesian[1] == 0 && cartesian[2] == 0){ delta[0] = 0; delta[1] =0; delta[2] = 0; } else { delta[TOWER_1] = sqrt(delta_diagonal_rod_2 - sq(delta_tower1_x-cartesian[X_AXIS]) - sq(delta_tower1_y-cartesian[Y_AXIS]) ) + cartesian[Z_AXIS]; delta[TOWER_2] = sqrt(delta_diagonal_rod_2 - sq(delta_tower2_x-cartesian[X_AXIS]) - sq(delta_tower2_y-cartesian[Y_AXIS]) ) + cartesian[Z_AXIS]; delta[TOWER_3] = sqrt(delta_diagonal_rod_2 - sq(delta_tower3_x-cartesian[X_AXIS]) - sq(delta_tower3_y-cartesian[Y_AXIS]) ) + cartesian[Z_AXIS]; for(int i=0;i<3;i++){ delta[i] = ((delta[i] - 111.96) * stepsPerRevolution / LEAD); } } if(serial_notes){ Serial.print("cartesian x="); Serial.print(cartesian[X_AXIS]); Serial.print(" y="); Serial.print(cartesian[Y_AXIS]); Serial.print(" z="); Serial.println(cartesian[Z_AXIS]); Serial.print("delta tower1="); Serial.print(delta[TOWER_1]); Serial.print(" tower2="); Serial.print(delta[TOWER_2]); Serial.print(" tower3="); Serial.println(delta[TOWER_3]); } } /****************************************stepperMove******************************************/ void stepperMove(long _x, long _y, long _z){ long positions[3]; positions[0] = _x; //steps < 0, 向下运动 ; steps > 0, 向上运动 positions[1] = _y; positions[2] = _z; steppers.moveTo(positions); steppers.runSpeedToPosition(); stepper_x.setCurrentPosition(0); stepper_y.setCurrentPosition(0); stepper_z.setCurrentPosition(0); } /****************************************stepperSet******************************************/ void stepperSet(float _v, float _a){ stepper_x.setMaxSpeed(_v); //MaxSpeed: 650 stepper_x.setAcceleration(_a); stepper_y.setMaxSpeed(_v); stepper_y.setAcceleration(_a); stepper_z.setMaxSpeed(_v); stepper_z.setAcceleration(_a); } /****************************************stepperReset******************************************/ void stepperReset(){ digitalWrite(EN, LOW); if(cartesian[2] != 0){ Get_command(0, 0, cartesian[2]); Process_command(); digitalWrite(EN, LOW); } while(digitalRead(SENSOR_TOWER1) && digitalRead(SENSOR_TOWER2) && digitalRead(SENSOR_TOWER3)){ stepperMove(10, 10, 10); } stepperSet(1200.0, 100.0); stepperMove(-400, 0, 0); while(digitalRead(SENSOR_TOWER1)){ stepperMove(10, 0, 0); } stepperMove(0, -400, 0); while(digitalRead(SENSOR_TOWER2)){ stepperMove(0, 10, 0); } stepperMove(0, 0, -400); while(digitalRead(SENSOR_TOWER3)){ stepperMove(0, 0, 10); } for(int i=0;i<3;i++){ cartesian[i] = 0.0; } if(serial_notes) Serial.println("resetComplete!"); digitalWrite(EN, HIGH); } /*************************************************** electromagnet *************************************************************/ void putUp(){ digitalWrite(9, HIGH); digitalWrite(10, LOW); } void putDown(){ digitalWrite(9, LOW); digitalWrite(10, LOW); } /************************************************** test ******************************************************************/ void test(){ Get_command(0, 0, down); Process_command(); delay(500); putUp(); Get_command(0, 0, up); Process_command(); Get_command(25, 0, up); Process_command(); Get_command(25, 0, down); Process_command(); putDown(); delay(500); putDown(); putUp(); Get_command(25, 0, up); Process_command(); Get_command(0, 25, up); Process_command(); Get_command(0, 25, down); Process_command(); putDown(); delay(500); putDown(); putUp(); Get_command(0, 25, up); Process_command(); Get_command(-25, 0, up); Process_command(); Get_command(-25, 0, down); Process_command(); putDown(); delay(500); putUp(); Get_command(-25, 0, up); Process_command(); Get_command(0, -25, up); Process_command(); Get_command(0, -25, down); Process_command(); putDown(); delay(500); putUp(); Get_command(0, -25, up); Process_command(); Get_command(25, 0, up); Process_command(); Get_command(25, 0, down); Process_command(); putDown(); delay(500); putUp(); Get_command(25, 0, up); Process_command(); Get_command(0, 0, up); Process_command(); Get_command(0, 0, down); Process_command(); delay(500); putDown(); }
5. 扩展
下图是另一种外观的Delta机械臂(R037c),控制原理完全一样。

审核编辑黄宇
-
电磁铁
+关注
关注
2文章
165浏览量
14833 -
Delta
+关注
关注
1文章
28浏览量
12236 -
机械臂
+关注
关注
12文章
513浏览量
24565
发布评论请先 登录
相关推荐
PPEC inside 超导 / 磁铁电源,以搭积木的方式快速满足您的磁铁供电需求
RK3568国产实验箱+人工智能机械臂:跳舞、叠罗汉、夹方块、积木搬运案例全解!

机械臂的高效运作,连接器起关键作用

铁芯长短与电磁铁磁力大小的关系

干货!国产Cortex-A55人工智能实验箱机械臂积木搬运实验案例
电磁继电器的原理是什么?为什么要使用电磁继电器?
电磁继电器的工作电路由什么和什么构成
Lake Shore 电磁铁电源 643发生故障了如何维修

【科准测控】电磁铁力特性测试方法和设备介绍!






 工商网监
工商网监
评论