 如何让小型双轮差速底盘实现双灰度循迹功能?
如何让小型双轮差速底盘实现双灰度循迹功能?
1. 功能说明
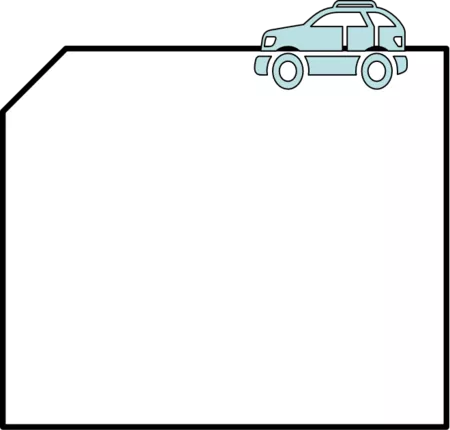
在机器人车体上安装2个 灰度传感器 ,实现机器人按照下图所指定的路线进行导航运动,来interwetten与威廉的赔率体系 仓库物流机器人按指定路线行进的工作过程。

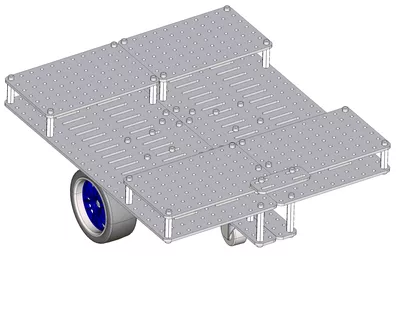
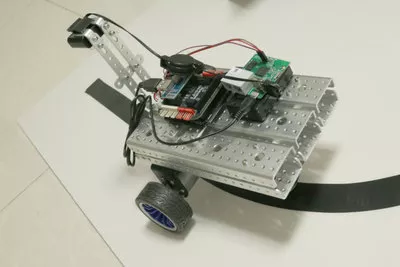
2. 使用样机
本实验使用的样机为R023e样机。
3. 功能实现
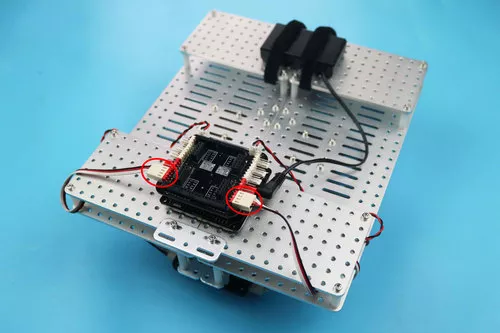
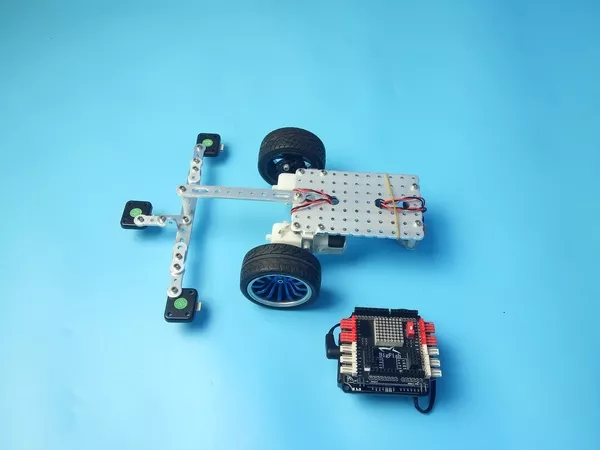
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | SH-01外围电路扩展板(与Bigfish扩展板相似) |
| 传感器 | 灰度传感器 |
| 电池 | 7.4V锂电池 |
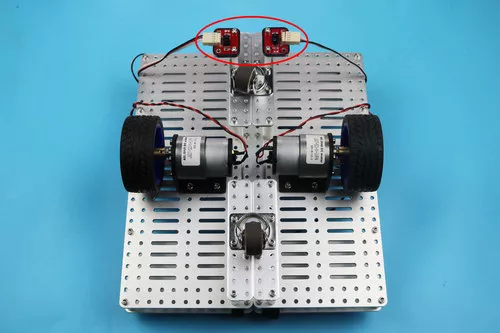
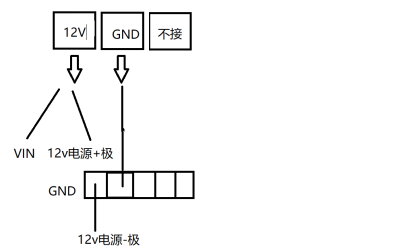
电路连接说明:
② 2个灰度传感器分别接在扩展板的传感器接口A0、A4上。
3.2 编写程序
传感器触发情况、小车行驶状态、对应行为策略表:
| 传感器1 | 传感器2 | 小车状态 | 动作 |
| 0 | 1 | 小车左偏 | 向右调整 |
| 1 | 0 | 小车右偏 | 向左调整 |
| 1 | 1 | 到达终点 | 停止 |
| 0 | 0 | 正常 | 前进 |
① 根据实验内容,利用多分支结构设计出程序流程图。
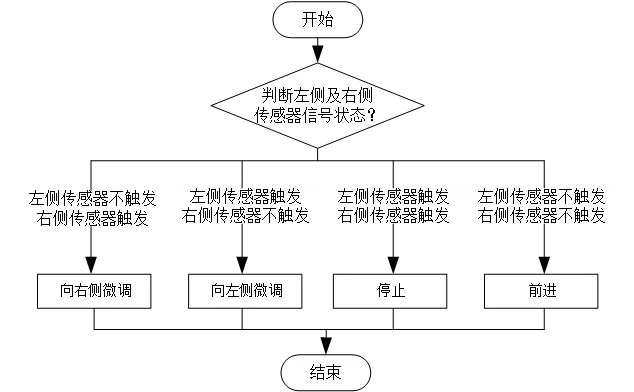 机器人轨迹导航任务流程图
机器人轨迹导航任务流程图
② 根据设计好的程序流程图进行编程,编写并烧录以下程序(blackline_4if.ino),该程序将实现演示视频中的动作【完整例程源代码下载详见https://www.robotway.com/h-col-113.html】
编程环境:Arduino 1.8.19
/*------------------------------------------------------------------------------------ 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2023-02-09 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ void turnleft_slow(); void forward(); void carstop(); void turnright_slow(); void setup() { pinMode( 18, INPUT); pinMode( 14, INPUT); pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); } void loop() { if (( digitalRead(14) && digitalRead(18) )) { forward(); } if (( !( digitalRead(14) ) && digitalRead(18) )) { turnleft_slow(); } if (( digitalRead(14) && !( digitalRead(18) ) )) { turnright_slow(); } if (( !( digitalRead(14) ) && !( digitalRead(18) ) )) { carstop(); delay( 5000 ); } } void turnright_slow() { analogWrite(6 , 80); analogWrite(10 , 0); analogWrite(5 , 0); analogWrite(9 , 0); } void carstop() { analogWrite(6 , 0); analogWrite(10 , 0); analogWrite(5 , 0); analogWrite(9 , 0); } void turnleft_slow() { analogWrite(6 , 0); analogWrite(10 , 0); analogWrite(5 , 80); analogWrite(9 , 0); } void forward() { analogWrite(6 , 80); analogWrite(10 , 0); analogWrite(5 , 80); analogWrite(9 , 0); }
也可以使用if…else嵌套写法(blackline_ifelse.ino)。
void stop();
void left();
void right();
void forwards();
void setup()
{
pinMode( 18, INPUT);
pinMode( 14, INPUT);
pinMode( 10, OUTPUT);
pinMode( 6, OUTPUT);
pinMode( 5, OUTPUT);
pinMode( 9, OUTPUT);
}
void loop()
{
if (( !( digitalRead(14) ) && digitalRead(18) ))
{
right();
}
else
{
if (( digitalRead(14) && !( digitalRead(18) ) ))
{
left();
}
else
{
if (( !( digitalRead(14) ) && !( digitalRead(18) ) ))
{
stop();
}
else
{
forwards();
}
}
}
}
void stop()
{
analogWrite(5 , 0);
analogWrite(9 , 0);
analogWrite(6 , 0);
analogWrite(10 , 0);
}
void right()
{
analogWrite(5 , 150);
analogWrite(9 , 0);
analogWrite(6 , 0);
analogWrite(10 , 150);
}
void forwards()
{
analogWrite(5 , 150);
analogWrite(9 , 0);
analogWrite(6 , 150);
analogWrite(10 , 0);
}
void left()
{
analogWrite(5 , 0);
analogWrite(9 , 150);
analogWrite(6 , 150);
analogWrite(10 , 0);
}
审核编辑黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51076浏览量
753345 -
机器人
+关注
关注
211文章
28405浏览量
207021
发布评论请先 登录
相关推荐
怎样用Labview的vision相关模块实现图像的灰度扫描以及灰度差分
怎样用Labview的vision相关模块实现图像的灰度扫描以及灰度差分,可以详细点:具体用到哪些模块,求赐教。
发表于 06-26 20:08
循迹智能小车是由哪些部分组成的
循迹智能小车 循黑线文章目录循迹智能小车 循黑线硬件菜单硬件使用硬件组装程序设计前的理解程序代码硬件菜单单片机型号:STC16F40K1284路红外循迹模块小车底盘套件(一个
发表于 07-14 06:56
差分底盘的设计资料分享
SLAM+语音机器人DIY系列:(四)差分底盘设计——1.stm32主控硬件设计摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难
发表于 02-14 06:29
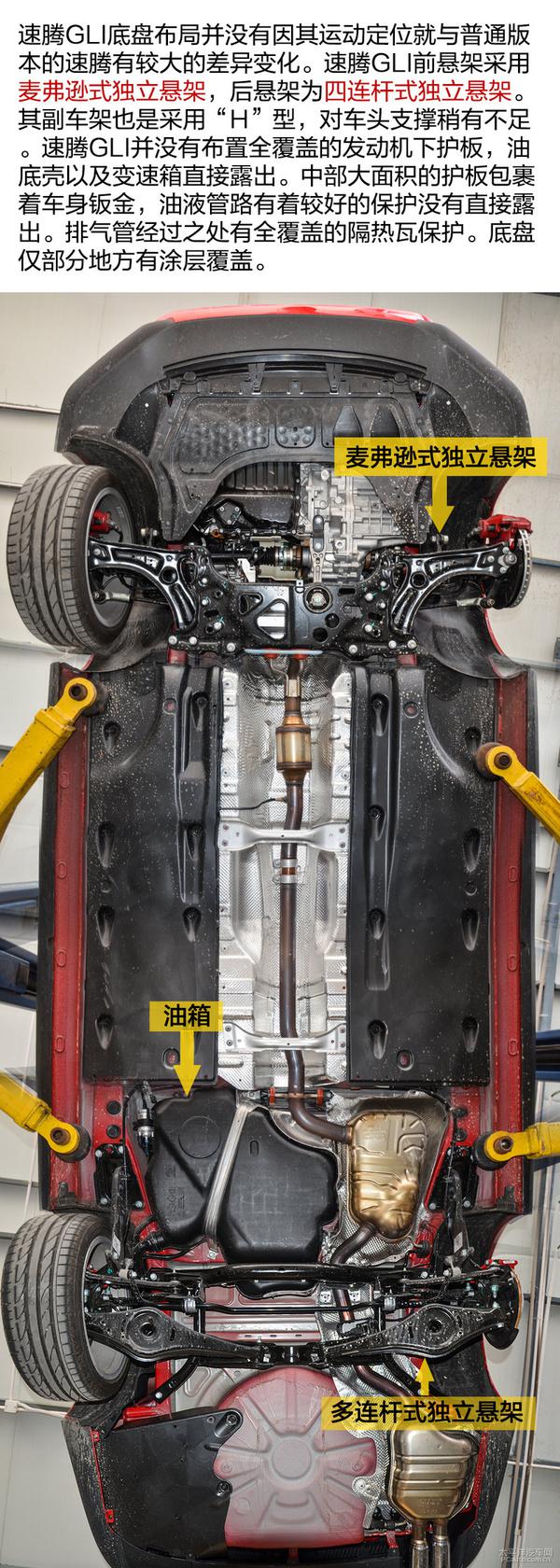
深度解析一汽-大众速腾GLI底盘
大众对中国市场有着特殊的情怀,从一开始的捷达,再到现阶段的速腾,曾一度让国人疯狂恋上。这一点至今并没有多少个品牌做得到。现在购车人群逐步年轻化,年轻的小伙子在购车考虑舒适性的同时也注重了驾驶乐趣。速
使用以双灰度传感器实现的曲线循迹以及矩形循迹的资料说明
在这次课程中,我们小组选定的课题是循迹小车,在长达数周的辛苦付出中,我组小车已能实现的功能有1.红遥控小车2.以灰度传感器实现矩形
发表于 12-23 08:00
•12次下载

小型三节履带底盘的制作
双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过
小型双轮差速底盘视觉循迹功能的实现
1. 任务描述 在机器人小车上搭载摄像头,摄像头采集图像信息并通过WiFi将信息传递给PC端,然后PC端使用OpenCV对摄像头读取到的视频进行灰度化、高斯滤波、腐蚀、膨胀等处理,使图像
小型平行履带底盘实现双灰度循迹功能
1. 功能说明 在小型平行履带底盘样机上安装2个 灰度传感器 ,实现机器人沿指定路线进行运动的效果。 2. 使用样机 本实验使用

DGT-01M四轮差速移动机器人底盘
DGT-01M 机器人底盘是一款多功能william hill官网
的实用新型产品,是一种四轮运载平台,采用四轮差速结构,原地转向,体型小,灵活性强,并且采用模块化设计,具有相对独立性、互换性、通用性,模块
发表于 12-23 09:37
•2次下载





 工商网监
工商网监
评论