 二端口矩阵与系统函数
二端口矩阵与系统函数
引言
这一部分的内容是之前12部分内容的综合,也是电路分析基础部分的最后一章内容。是利用之前所学的全部内容对系统和电路进行的深层理解。
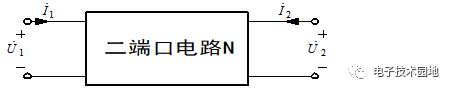
(1)之前讨论的电路主要是在一个电路及其输入给定的情况下,如何去计算一条活着多条支路的电压和电流,若一个复杂的电路只有两个端子向外连接,且仅对外接电路中的情况感兴趣,则该电路可以视为一个一端口。在工程中遇到的问题经常涉及两对端子之间的关系,比如变压器,滤波器,放大器等等。如果两对端子满足端口条件,即对于所有时间t,从端子1流入方框的电流等于从端子1’流出的电流,同时,从端子2流入方框的电流等于从端子2’流出的电流,这种电路称为二端口网络(简称二端口)。
(2)二端口矩阵分为Z参数矩阵(阻抗矩阵),Y参数矩阵(导纳矩阵),T参数矩阵(A参数矩阵),H参数矩阵四种,下面给出推导步骤:
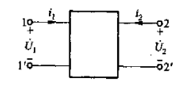
假定存在一个二端口结构如下图所示

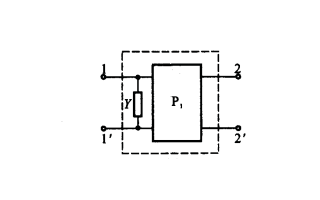
(4)二端口的连接:二端口的连接方式有三种,即级联方式,并联方式和串联方式,如下图所示:

2、系统框图
在系统设计的时候,需要首先进行框架设计,即先构思出系统的各个模块(即实现某个功能的部分),而后将模块组合,连续系统中,系统具有数乘器,加法器,乘法器,微分器和积分器。而离散系统中,系统具有加法器,数乘器和单位延迟器,系统框图如表所示。

3、信号流图
系统框图绘制比较麻烦,所以,为了简便的绘制系统框图通常采用信号流图的方式,在连续系统中,系统一般有数乘器,加法器,微分器和积分器。而离散系统中,系统则具有加法器,数乘器和单位延迟器,各部件的信号流图如下表所示。


5、系统稳定性判定
(1)通常称令系统函数的分母为0的点成为极点,分子为0的点称为零点。
(2)对于连续系统的稳定性,当系统函数的极点均位于s域左半平面的时候,系统才稳定,否则就不稳定,通常对于高阶多项式通常采用R-H准则判断系统的稳定性,但是如果可以求解出系统函数的极点,也可以不使用用这种方式。
(3)对于离散系统的稳定性,若系统为因果系统,当系统函数的极点均位于单位圆内时,系统稳定。当无法使用极点来判断的时候,通常采用朱里阵列来判断离散系统是否稳定。
注:由于朱里阵列和R-H准则太过复杂,所以请读者自行百度即可。
6、系统的输出方程的矩阵形式与状态方程的矩阵形式
通过列写状态变量与输入和输出之间的关系来确定状态方程,其实就是利用输入与输出来描述状态变量,用状态变量来描述系统的输出。采用例题的方式进行解释。
7、例题分析
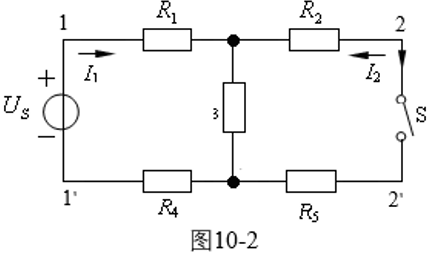
(1)例题1:求图示电路的Z参数,Y参数和T参数矩阵。


(2)例题2:求解信号流图所表示的系统函数(未标出的之路增益为1),写出图2的状态方程与输出方程的矩阵形式,并判断图2所示系统的稳定性。



-
参数
+关注
关注
11文章
1832浏览量
32196 -
矩阵
+关注
关注
0文章
423浏览量
34528 -
二端口
+关注
关注
0文章
5浏览量
4895
发布评论请先 登录
相关推荐
请问一个有关于歆杰老师讲的关于二端网络的问题
用二端口S参数来表征差分电路的特性
二端口网络.ppt
负载变化对设计二端口网络传输特性的影响
计及寄生参数效应的铁氧体共模扼流圈二端口网络的建立
二端口网络参数_二端口网络参数的测定


无源二端口网络实验的学习课件免费下载
从电路原理讲述二端口网络
基于二端口网络理论的航空起动/发电机宽频阻抗建模方法






 工商网监
工商网监
评论