 MATLAB学习笔记之模糊算法3
MATLAB学习笔记之模糊算法3
1.4.2 C语言代码
#include
#include
#include
#define N 7 //定义量化论域模糊子集的个数
//模糊语言定义
#define NB -3
#define NM -2
#define NS -1
#define ZO 0
#define PS 1
#define PM 2
#define PB 3
struct
{
//规则表
int rule[ N ][ N ] ; //模糊规则表
//隶属度函数
char *f_type_e ; //e的隶属度函数类型
char *f_type_de ; //de的隶属度函数类型
char *f_type_u ; //u的隶属度函数类型
float paras_e[ 3*N ] ; //e的隶属度函数的参数
float paras_de[ 3*N ] ; //de的隶属度函数的参数
float paras_u[ 3*N ] ; //u的隶属度函数的参数
//模糊运算参数
float Ke ; //Ke=n/emax,量化论域为[-3,-2,-1,0,1,2,3]
float Kde ; //Ke=n/demax,量化论域为[-3,-2,-1,0,1,2,3]
float Ku ; //Ke=umax/n,量¢化论域为[-3,-2,-1,0,1,2,3]
float umax ; //输出的上限
float emax ; //误差基本论域上限
float demax ; //误差变化率基本论域的上限
//控制目标参数
float target ; //控制目标
float actual ; //实际值
float e ; //误差
float e_pre ; //上一次的误差
float de ; //误差的变化率
}_fuzzy_;
/*******************************************************
Name :trimf
Function :三角隶属度函数
Parameter :
x:自变量
(a,b,c):定义域
Return :结果
*******************************************************/
float trimf( float x, float a, float b, float c )
{
float u ;
if( ( x>=a )&&( x<=b ) )
u = ( x-a )/( b-a ) ;
else if( ( x>b )&&( x<=c ) )
u = ( c-x )/( c-b ) ;
else
u = 0 ;
return u ;
}
/*******************************************************
Name :gaussmf
Function :正态隶属度函数
Parameter :
x:自变量
ave:均值
sigma:方差
Return :结果
*******************************************************/
float gaussmf( float x, float ave, float sigma )
{
float u ;
if( sigma<0 )
printf("方差不允许小于0\\n");
else
u = exp( -pow( ( ( x-ave )/sigma ), 2 ) ) ;
return u ;
}
/*******************************************************
Name :trapmf
Function :梯形隶属度函数
Parameter :
x:自变量
(a,b,c,d):定义域
Return :结果
*******************************************************/
float trapmf( float x, float a, float b, float c, float d )
{
float u ;
if( ( x>=a )&&( xelse if( ( x>=b )&&( x
**
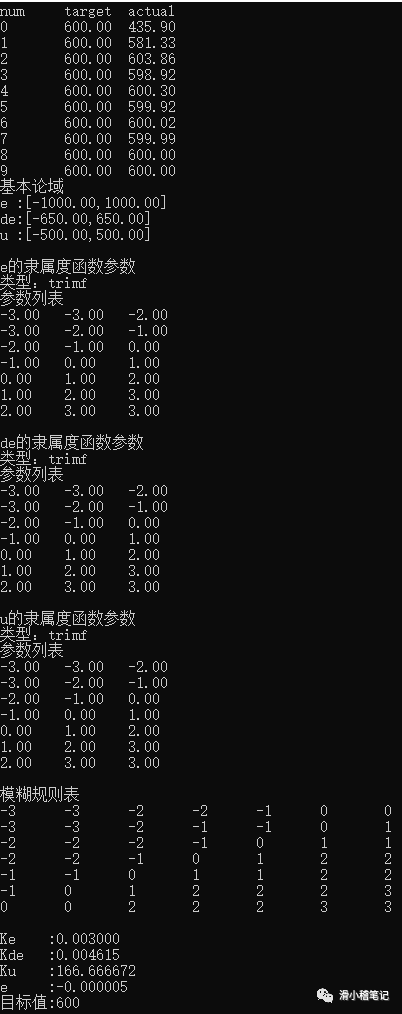
最终代码运行结果如下图所示。
参考于CDSN
**
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
模糊控制
+关注
关注
2文章
261浏览量
25502 -
模糊算法
+关注
关注
0文章
16浏览量
8740 -
自然语言
+关注
关注
1文章
288浏览量
13347
发布评论请先 登录
相关推荐
PID算法之模糊PID 精选资料推荐
这方面的需求而设计的。专家算法和模糊算法都归属于智能算法的范畴,智能算法最大的优点就是在控制模型未知的情况下,可以对模型进行控制。这里需要注
发表于 07-19 06:29
PID算法学习笔记分享
最近在学习与无人机有关的一些控制算法,在这里做一些笔记,今天学的是有关于PID的算法。什么是PID首先关于PID的定义,因为我本身不是自动控制专业出身所以对于概念这个东西比较
发表于 01-14 06:50
基于模糊高斯学习策略的粒子群进化融合算法
针对粒子群优化(PSO)算法存在的开发能力不足,导致算法精度不高、收敛速度慢以及微分进化算法具有的探索能力偏弱,易陷入局部极值的问题,提出一种基于模糊高斯
发表于 11-27 17:35
•1次下载
OpenStack之Cinder学习笔记
OpenStack之Cinder学习笔记(开关电源威廉希尔官方网站
教程ppt)-该文档为OpenStack之Cinder学习
发表于 09-23 12:40
•5次下载

基于深度学习的图像去模糊算法及应用
当前,绝大部分基于深度学习的图像去模糊算法是不区分场景的,也就是他们是对常见的自然与人为设计的场景进行去模糊。但是,在现实生活中,经常会遇到一些特定场景的图像去
MATLAB学习笔记之模糊算法1
所谓模糊控制,就是对难以用已有规律描述的复杂系统,采用自然语言(如大,中,小)加以描述,借助定性的,不精确的以及模糊的条件语句来表达,模糊控制是一种基于语言的智能控制。
MATLAB学习笔记之模糊算法2
所谓模糊控制,就是对难以用已有规律描述的复杂系统,采用自然语言(如大,中,小)加以描述,借助定性的,不精确的以及模糊的条件语句来表达,模糊控制是一种基于语言的智能控制。
MATLAB学习笔记之WM算法
在现代智能控制算法中,模糊控制是在实际控制系统设计中使用比较成熟的一种方法。模糊控制可以使用在一些无法建立系统模型的场合,根据专家经验确定模糊规则,实现对系统的控制。





 工商网监
工商网监
评论