 AUTOSAR通信之CanIf模块简介1
AUTOSAR通信之CanIf模块简介1
1 位置和作用
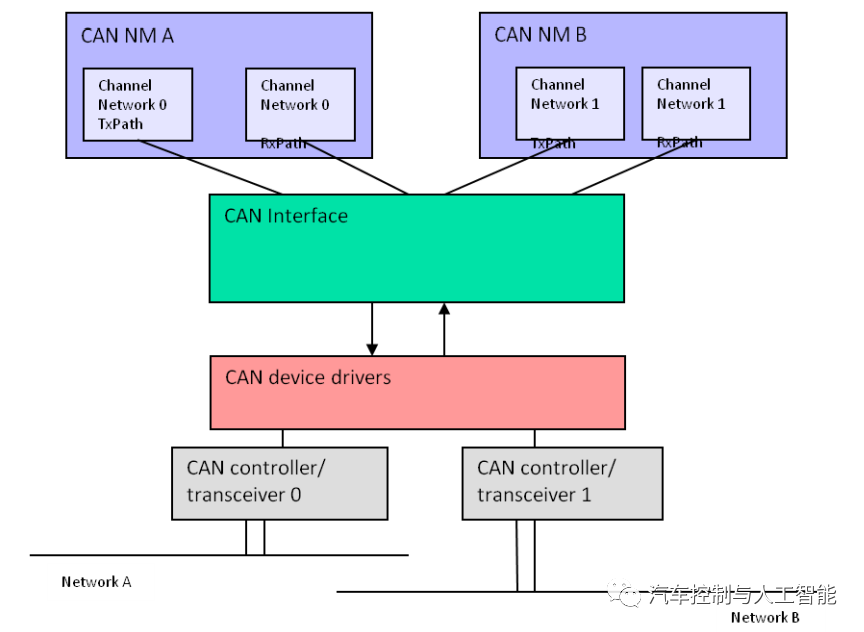
如图1所示,CAN接口模块(下文简“CanIf”)位于底层CAN驱动(CanDrv)、CAN收发器(CanTrcv)和上层通信服务层(CanSm、CanNm)、CAN传输协议(CanTp)、PDU路由器(PduR)之间。它表示上层通信层的CAN驱动程序服务接口。
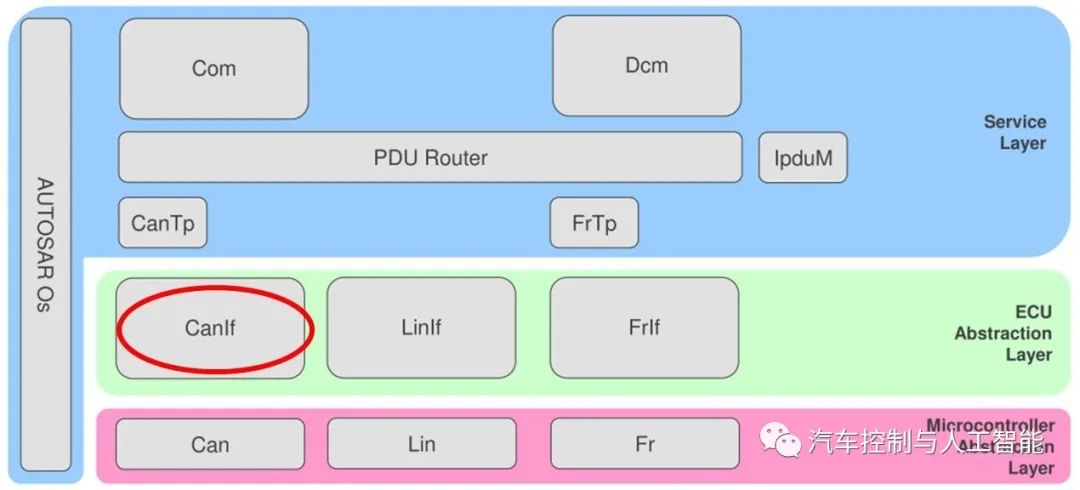
图1 CanIf的位置
CanIf提供了独特的接口来管理不同CAN硬件,如CAN控制器和CAN收发器。同时,基于物理CAN通道相关的CAN状态管理器模块(CanSm)可以控制多个底层内部和外部的CAN控制器或CAN收发器。
CanIf由与CAN硬件无关的任务组成,属于ECU CAN通信驱动程序。CanIf满足PduR和AUTOSAR COM栈上层通信模块的控制流和数据流要求:发送请求处理、发送确认、接收指示、错误通知和CAN控制器的启动/停止,从而唤醒或参与网络。它的数据处理和通知API基于CAN L-SDU,用于控制和模式处理的API提供了CAN控制器相关的视图。
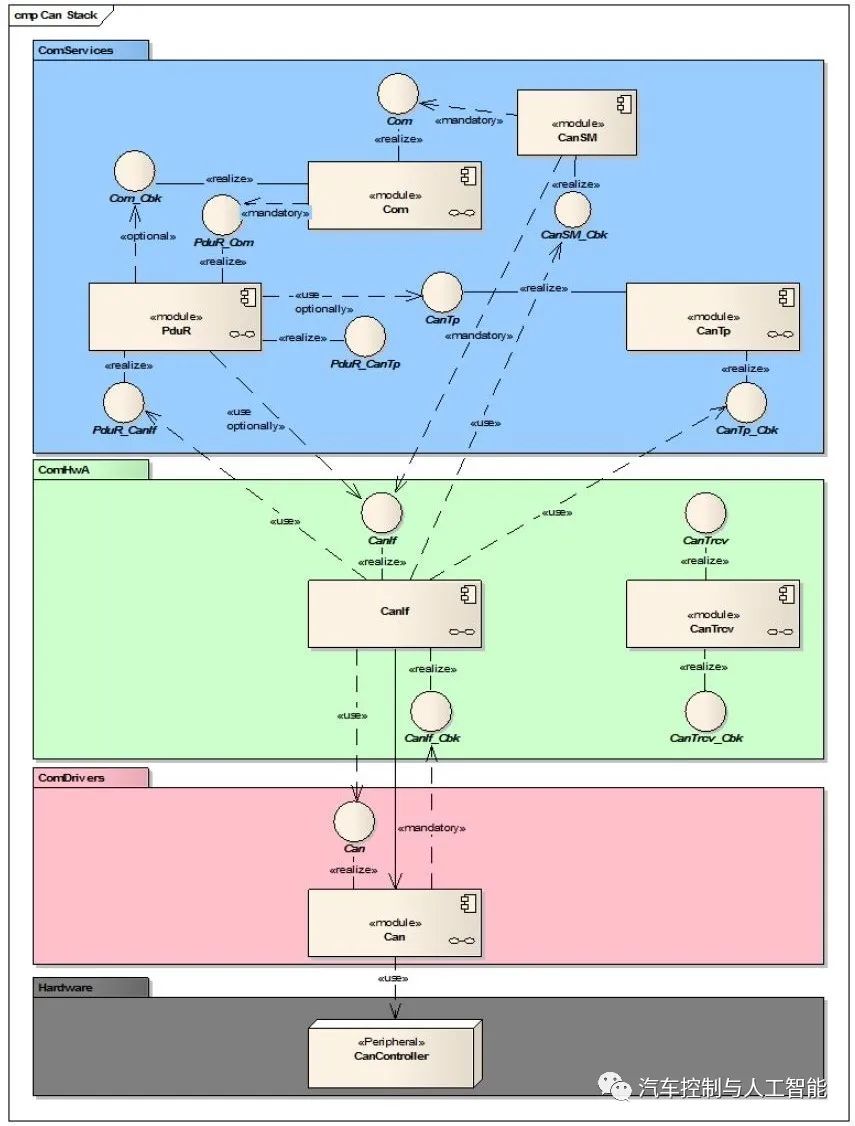
图2 CanIf模块和其他模块的关系
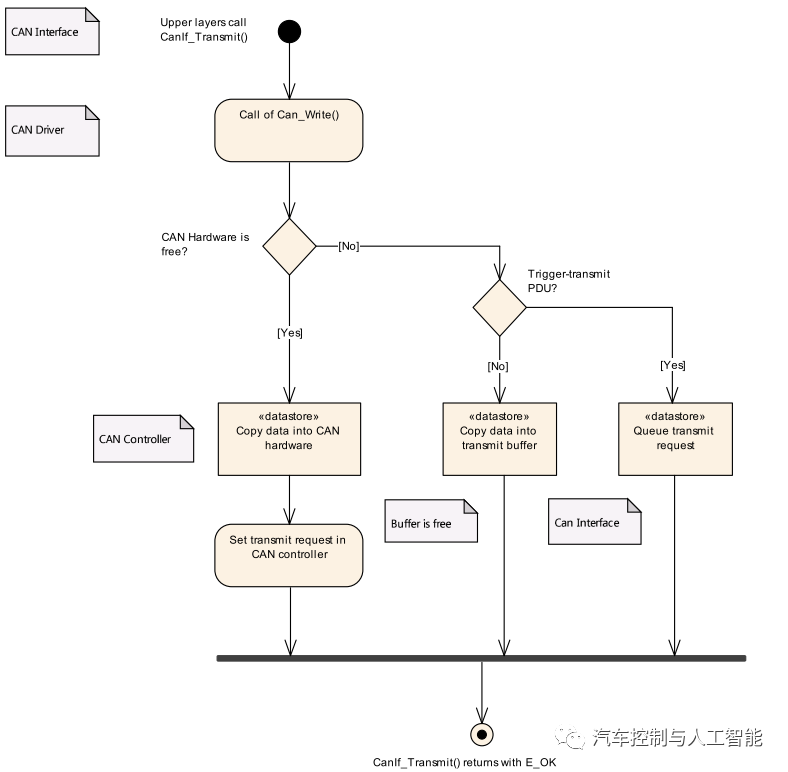
在发送请求时,CanIf用相应的参数完成L-PDU的传输,并通过对应CanDrv将CAN L-PDU转发给CAN控制器。在接收端,CanIf将接收到的I-PDU作为I-SDU分发到上层模块。接收L-SDU和上层之间的分配是静态配置的。在传输确认时,CanIf负责向上层发送传输成功的信息。
CanIf提供对CAN驱动程序的通信抽象访问和CAN收发驱动程序服务,用于对CAN网络的控制和监视。CAN接口将CAN状态管理器的状态向下转发到底层CAN驱动程序,向上CAN接口模块将CAN驱动程序或 CAN收发器驱动程序传递到相应的NM模块。
2 上下层关系
上层
AUTOSAR BSW分层架构中,CanIf的上层可以是PduR,可以是CanNm,可以CanTp,可以CanSm,EcuM或复杂的驱动模块CDD,普遍标定协议模块XCP,全局时间同步模块CanTSyn ,J1939传输层模块 J1939Tp和J1939网络管理模块 J1939Nm。
CanIf使用的API由通知服务组成,它们将CAN相关数据传输到目标上层。这些服务的调用参数指向CanDrv中的缓冲信息,或者直接指向CAN硬件。另外,CanIf支持对总线镜像模块的调出,来报告接收和传输帧的内容。EcuM会初始化CanIf。
下层
CanIf的下层模块主要是CAN驱动程序CanDrv。由于CanIf在AUTOSAR BSW架构中的地位,它与CanDrv有着密切的关系。CanDrv只提供对CAN控制器的硬件抽象访问,但是CanDrv会检测和处理CAN控制器的事件,并将这些事件通知到CanIf。CanIf将CanSm的操作模式请求传递给相应的底层CAN控制器。
CanDrv提供了标准化的L-PDU,以确保CanIf的硬件独立性。指向这个规范化的L-PDU的指针要么指向一个临时缓冲区,要么指向依赖于CAN硬件的CanDrv。CanDrv调用的回调服务是在CanIf中声明和实现的。由CanIf调用的回调服务被声明并放置在对应的上层通信服务层中,如PduR、CanNm、CanTp。
配置的CAN控制器的数量不一定是使用的CAN收发器的数量。如果多个不同类型的CAN控制器在同一个CAN网络上运行,一个CAN收发器是足够的,但是根据CAN控制器设备的类型,需要一个或两个不同的CanDrv。
第二个可用的底层CAN设备驱动程序是CAN收发器CanTrcv。
每个CanTrcv对CAN收发器进行操作模式的控制。CanIf只是将几个底层CanTrcv的API映射到一个惟一的API,因此,CanSm能够触发相应CAN收发模式的转换。CanIf中不执行属于CanTrcv所控制的功能。
CanIf将所有底层CanTrcv的下列服务映射到一个惟一的接口:
- 唯一的CanTrcv模式请求和读取服务来管理每个底层CAN收发设备的操作模式;
- 为CAN收发器读取服务,唤醒原因支持;
- 模式请求服务启用、禁用、清除唤醒事件状态使用的每个CAN收发器(CanIf_SetTrcvMode)。
3 配置
CanIf的设计经过优化,以管理CAN协议的特定功能和用于底层CAN控制器的处理。
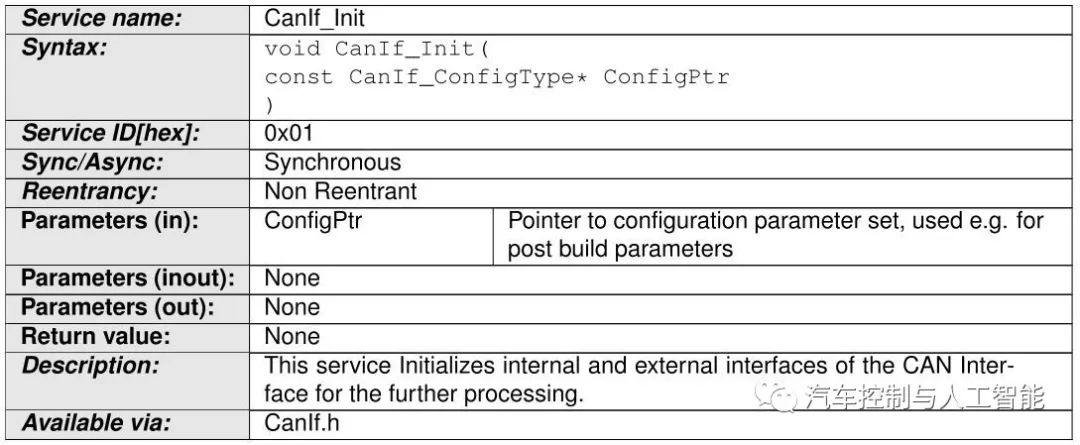
CanIf不需要重构就可以更改CAN配置。函数CanIf_Init()从配置容器和参数中获取所需的CAN配置信息。
可以获取到的信息包括:
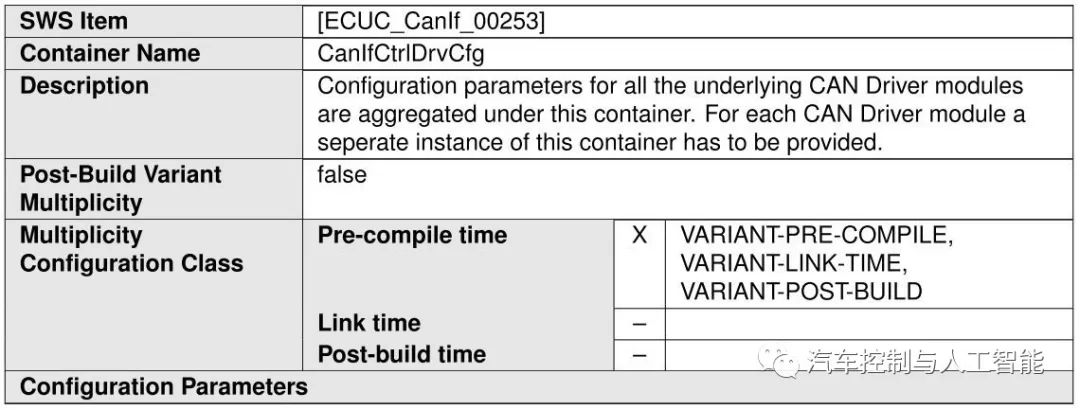
- CAN控制器的数量。CAN控制器的数量对于发送和接收I-PDU的调度以及对可用CAN驱动程序状态的控制是非常必要的,如下图CanIfCtrlDrvCfg。
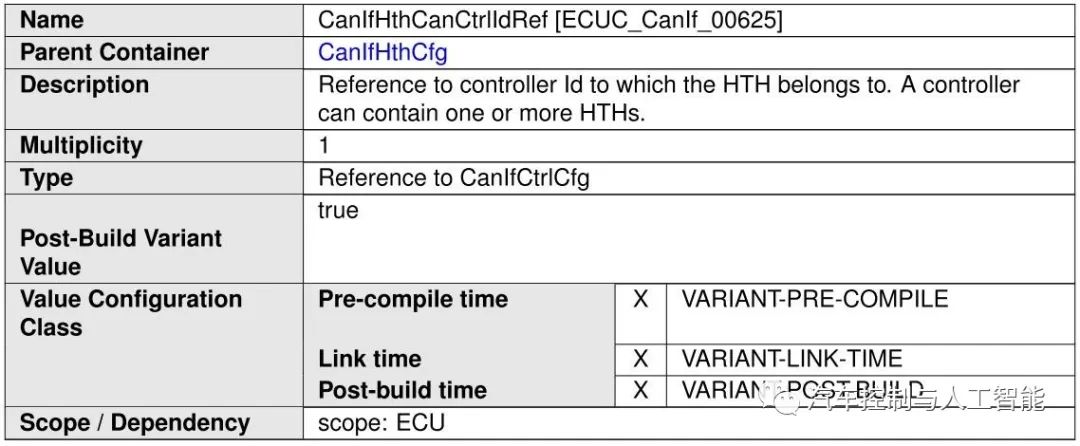
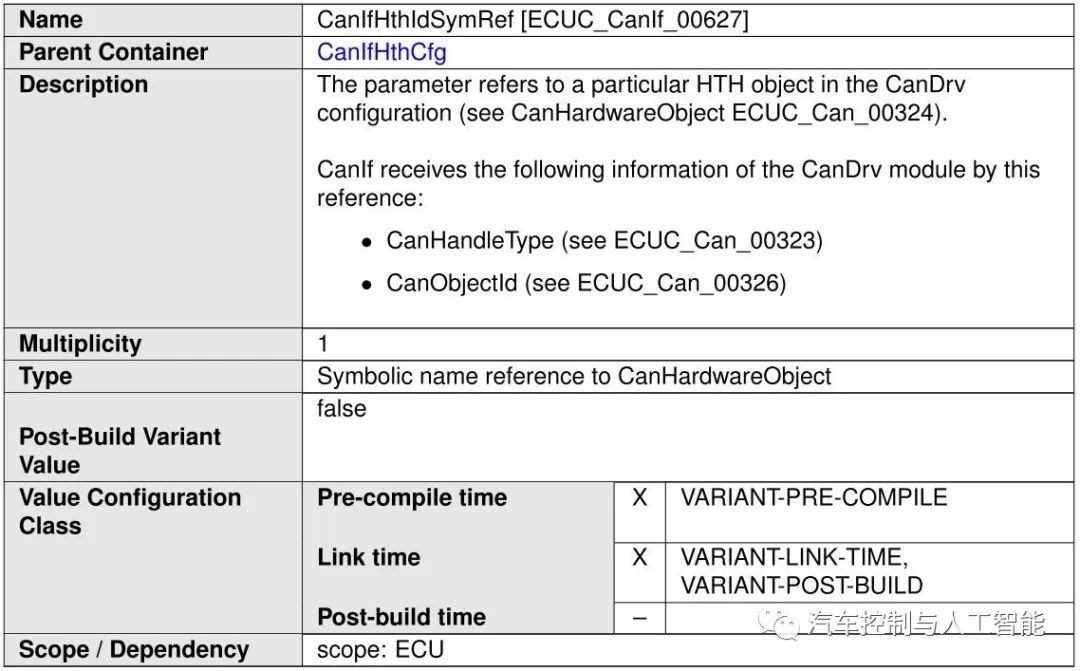
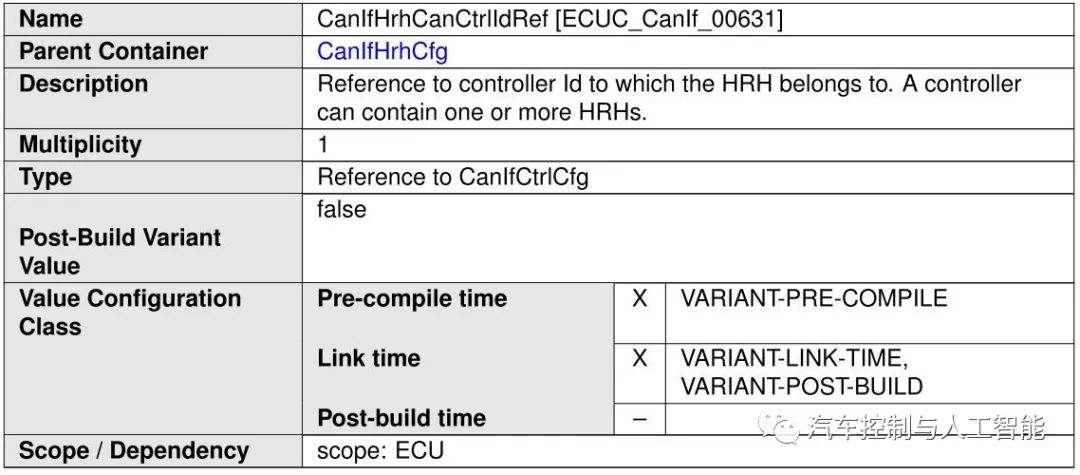
- 硬件对象句柄的数目。为了监督发送请求,CAN接口需要知道HTH的数量以及每个HTH与相应的CAN控制器之间的分配,如下图CanIfHthCanCtrlIdRef和CanIfHthIdSymRef。
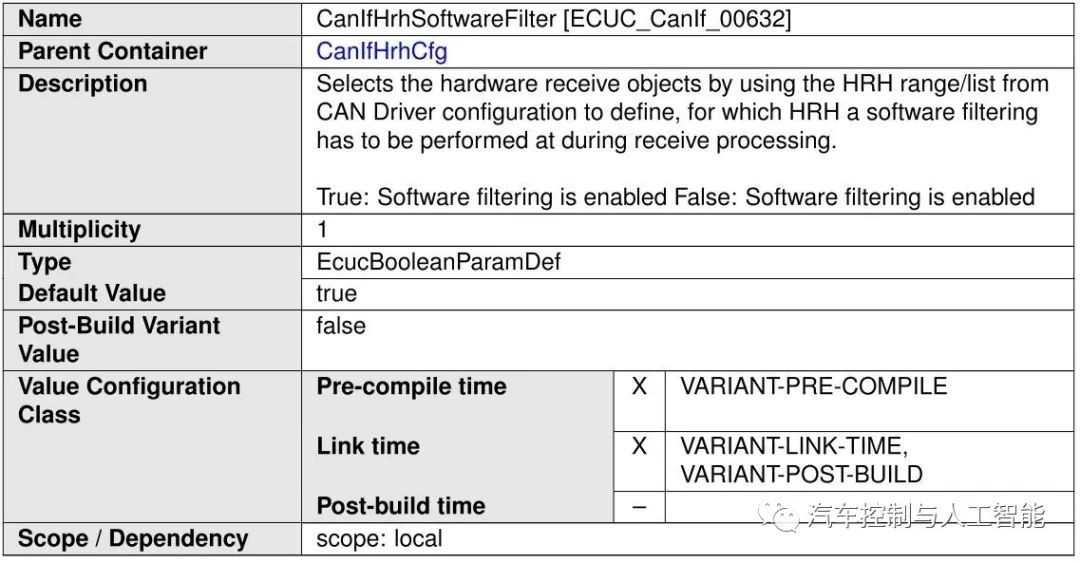
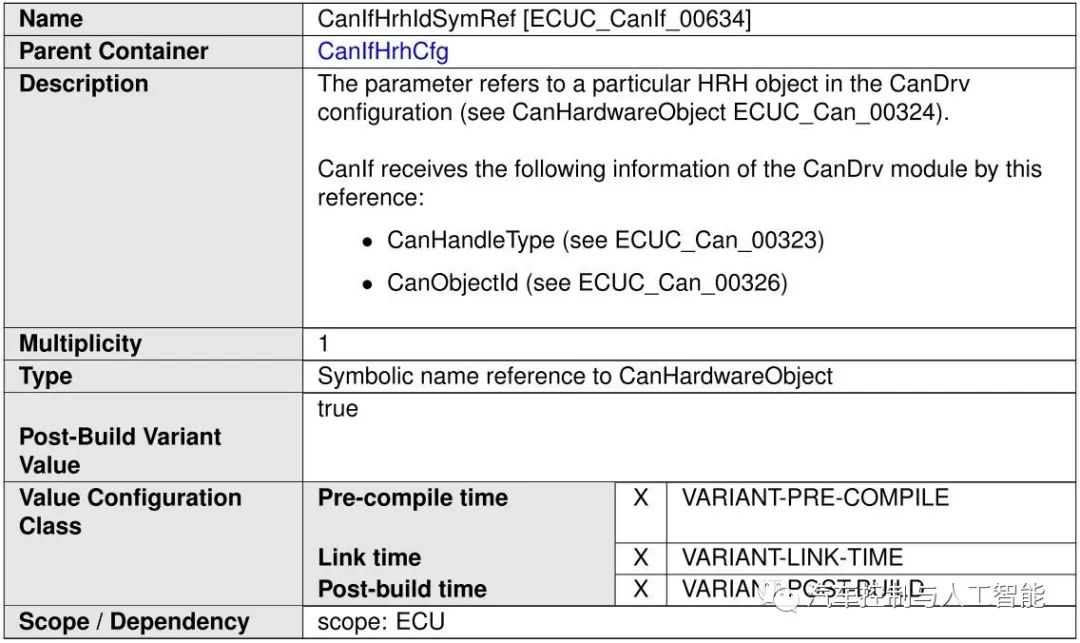
- 通过每个硬件对象的过滤器所接收到的CAN ID的范围。CAN接口使用HRH和L-PDU之间的固定分配,在相应的硬件对象中接收,进行搜索算法,见下图CanIfHrhSoftwareFilter,CanIfHrhCanCtrlIdRef和 CanIfHrhIdSymRef。
CanIf需要所有已使用的上层通信服务层和L-SDU的信息来分配。为了在AUTOSAR COM栈中集成CanIf,必须在配置时设置以下信息:
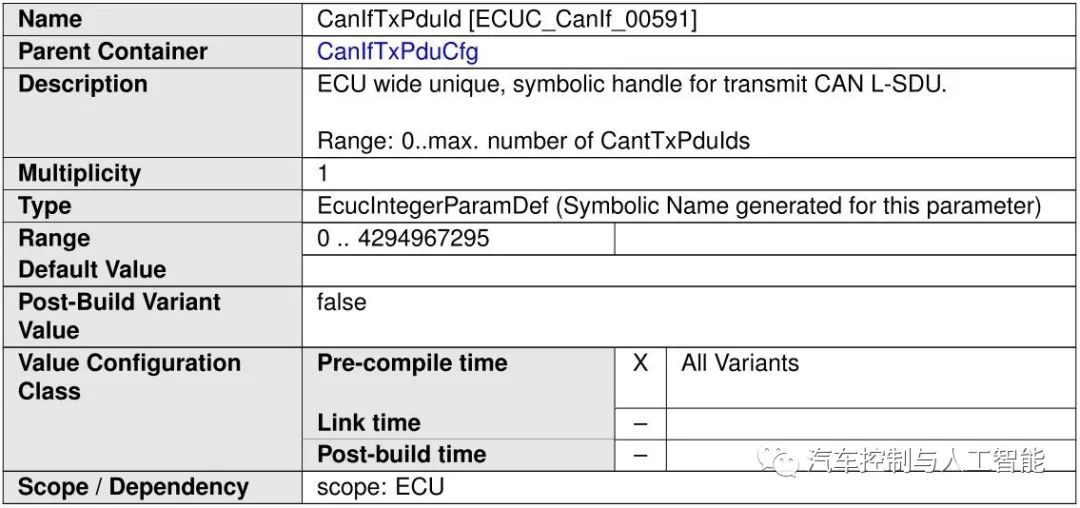
- 传递上层模块,并为每个传输L-SDU传输I-PDU,用于发送确认服务的调度,参见CanIfTxPduId。
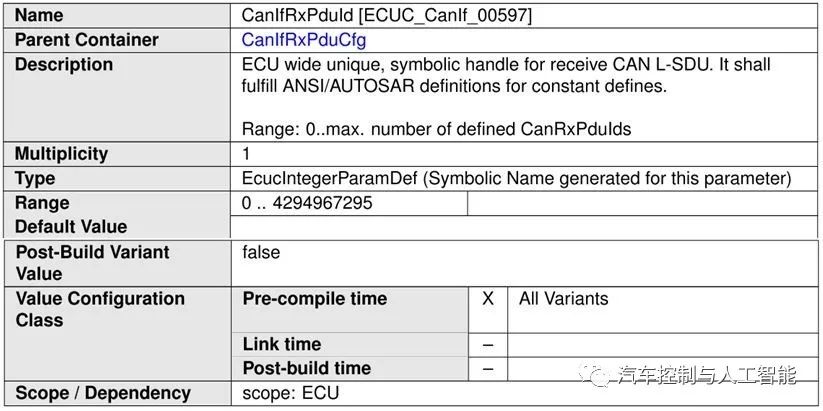
- 接收上层模块并为每个L-SDU接收I-PDU。用于接收指示期间的L-SDU调度,参见 CanIfRxPduId。
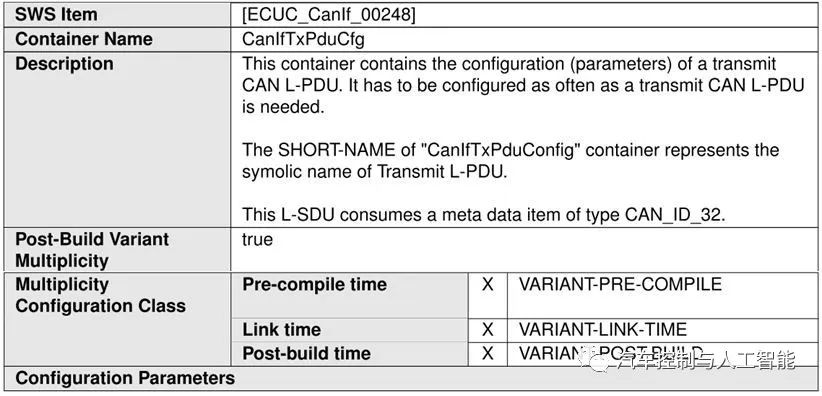
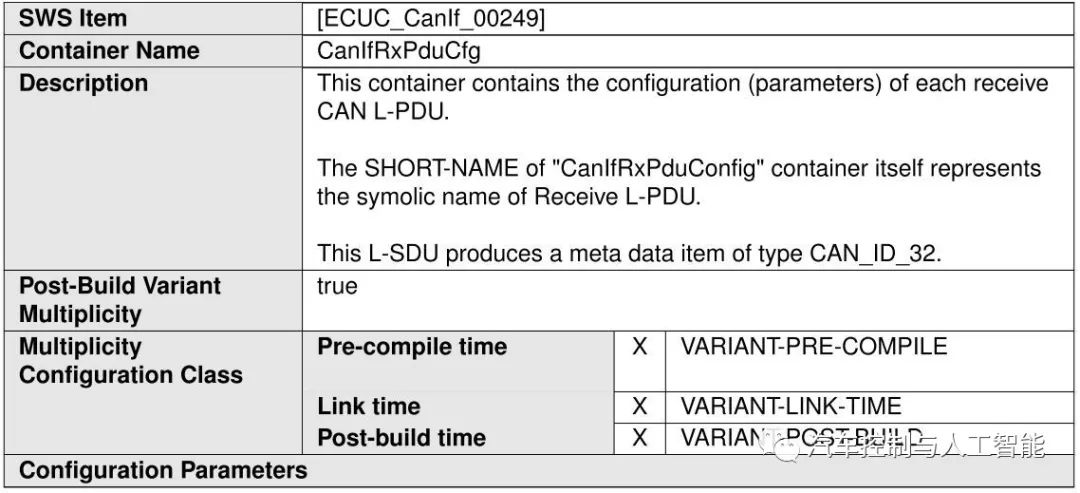
ECU连接到一个或多个CAN网络,CanIf需要控制器和ECU的描述。因此,以下信息是从AUTOSAR系统配置的一部分CAN通信矩阵中获取得到,见CanIfTxPduCfg和CanIfRxPduCfg:
- ECU物理通道上接收的所有I-PDU,用于软件过滤和接收L-SDU调度;
- 所有I-SDU应由ECU上的每个物理通道传递,用于发送请求和发送L-PDU调度;
- L-PDU的属性,包括ID和数据长度,用于软件滤波,接收指示服务,数据长度检查;
- 传输L-SDU的传递模块,即PduR、CanNm和CanTp,用于发送确认服务;
- 接收L-SDU的接收器,即PduR、CanNm和CanTp,用于L-PDU的调度;
- L-PDU和L-SDU名称,用于表示Rx/Tx数据缓冲区的地址;
4 功能服务
CanIf的服务可以分为以下几个主要内容:
- 初始化
- 发送请求服务
- 发送确认服务
- 接待指示服务
- 控制器模式控制服务
- PDU模式控制服务
CanIf的应用模式:
- 中断模式:
CanDrv处理由CAN控制器触发的中断。CanIf在事件发生时得到触发,在这种情况下,在CanDrv中相应的ISR中调用相关的CanIf服务。
- 轮询模式:
由SchM触发CanDrv,并执行后续进程。在这种情况下,必须在定义的时间间隔内,调用下列函数:
- Can_MainFunction_Write
- Can_MainFunction_Read
- Can_MainFunction_BusOff
- Can_MainFunction_Wakeup
- Can_MainFunction_Transceiver
CanIf由CanDrv通知事件接收、发送、BusOff和超时),这些事件发生在一个CAN控制器中等同于中断驱动操作。CanDrv更新属于CAN控制器中发生事件的相应信息,如接收L-PDU。
- 混合模式:
中断和轮询驱动CanDrv。根据所使用的CAN控制器,该功能可以分为中断驱动和轮询驱动两种操作模式。比如,轮询驱动的FullCAN接收和中断驱动的基本CAN接收,轮询驱动的传输和中断驱动的接收等。
AUTOSAR提供了独特的接口,对三种类型的操作模式都有效。无论是在中断、轮询还是混合处理事件时,CanIf都以相同的方式工作,区别是调用内容不同,还有通知中断的方式:抢占式或协作式。所有服务都是按照配置执行的。
初始化
EcuM调用CanIf的函数CanIf_Init()来初始化整个CanIf。在初始化过程,将对所有全局变量和数据结构初始化,包括标示和缓冲区。EcuM分别通过调用相应的初始化服务来执行CanDrv和CanTrcv的初始化。
在初始化完成后,CAN控制器保持在启动复位后的停止模式。在这种模式下,CanIf和CanDrv既不能发送也不能接收L-PDU。
如果在运行期间需要重新初始化整个CAN模块,EcuM会调用CanSm,通过调用CAN接口模块的API服务CanIf_SetControllerMode()来启动CAN控制器所需的状态转换,具体过程后续介绍CAN状态管理时会展开。CanIf将来自CanSm的调用映射到Candrv的调用上。
-
收发器
+关注
关注
10文章
3428浏览量
106006 -
CAN
+关注
关注
57文章
2754浏览量
463729 -
路由器
+关注
关注
22文章
3732浏览量
113795 -
PDU
+关注
关注
0文章
94浏览量
16981
发布评论请先 登录
相关推荐
AUTOSAR MCAL MCU模块的相关资料分享
AUTOSAR的相关资料推荐
AUTOSAR_MCAL_CAN_IM.pdf提示找不到 config/CanIf.xdm怎么解决?
AUTOSAR通信之CanIf模块简介2
AUTOSAR通信之CanIf模块简介3
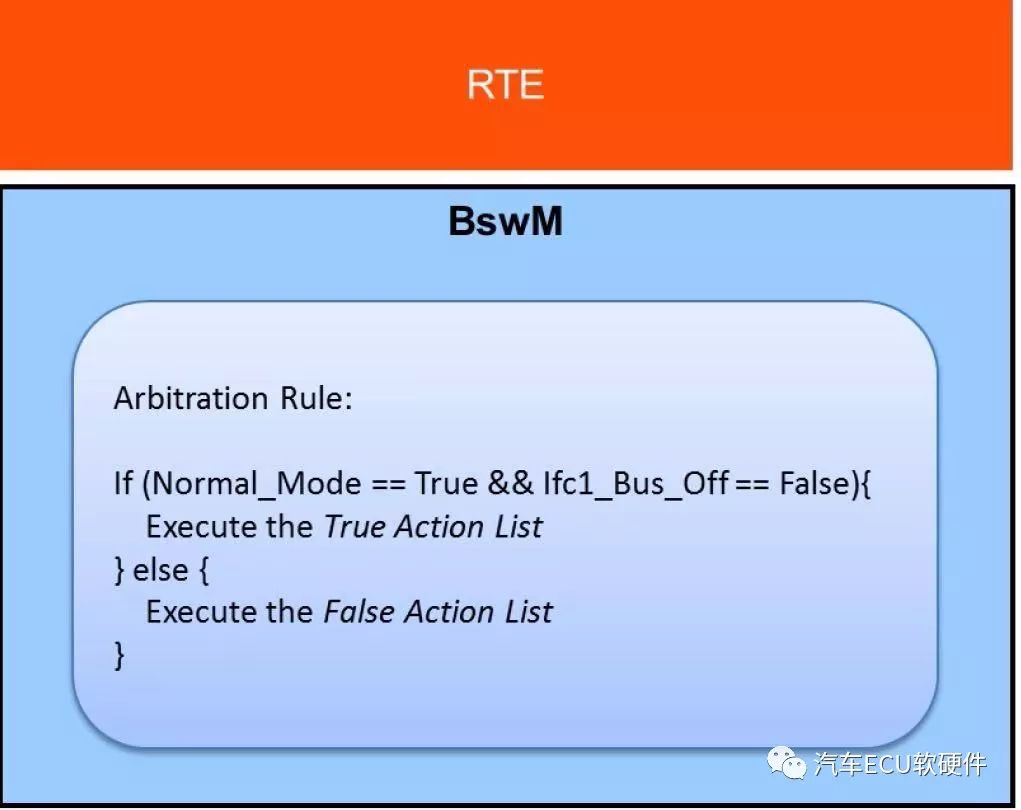
Autosar之BSWM配置简介
AUTOSAR中通信协议栈配置详解
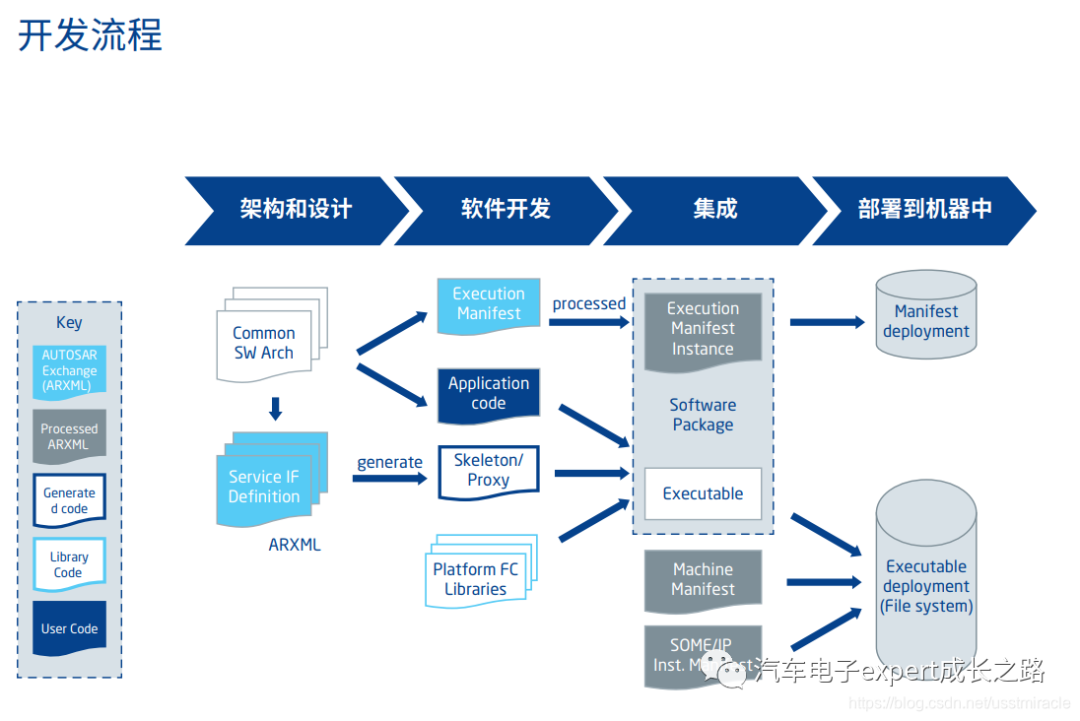
AUTOSAR软件开发流程简介





 工商网监
工商网监
评论