 单片机工控的电机减速算法是什么?
单片机工控的电机减速算法是什么?
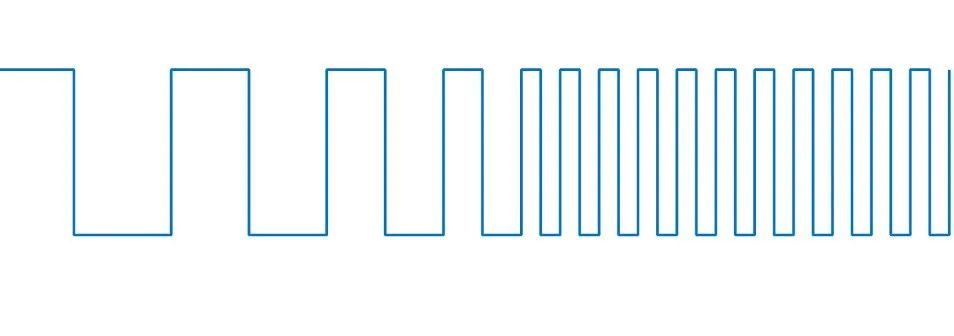
有不少网友感叹高铁威廉希尔官方网站 之稳,一杯水放在窗户上面都不会晃动.要达到这个‘稳’,就要在电机启动停止时,有一个加减速.电机启动时,速度需要逐渐提高,停止时,速度逐渐减小,这就是步进电机的加减速过程。单片机给步进驱动一个脉冲,电机转动一个步距角,单片机给脉冲越快,步进电机单位时间内,转动的角度也就越大.即脉冲频率正比于电机转速.另一方面,速度的变化对应的物理量是加速度,高中物理可以知道,一个加速过程一般涉及:初始速度,加速度,加速时间这三个量.对应到电机转动:起始转速(rpm),最大速度(rpm),加速时间(min),转速对应单片机定时器的频率 pulse/ms(单片机定时器1毫秒中断次数).
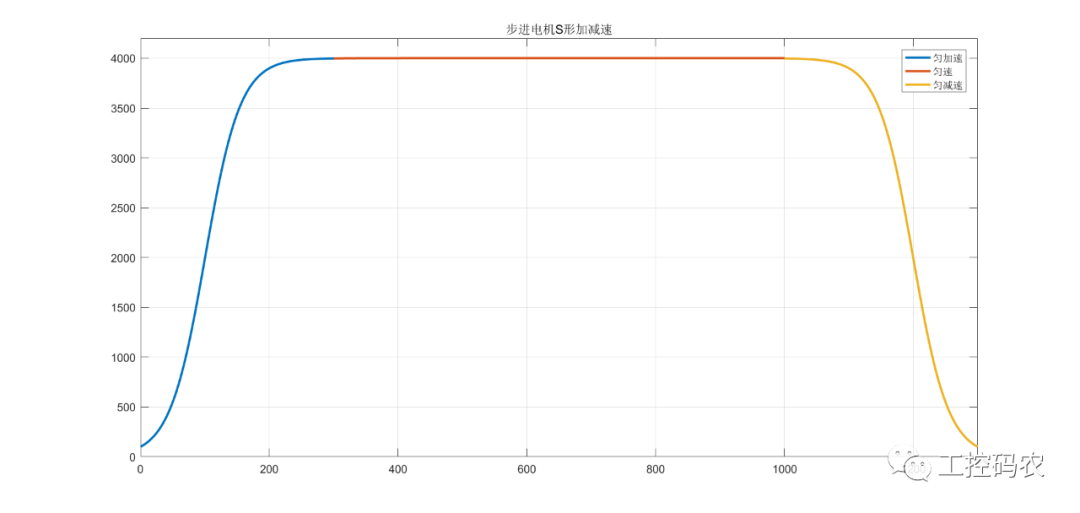
工控行业电机加减速一般有T型加速,S型加速.负载惯量比较轻的情况就可以使用T型曲线,负载惯量比较重的情况一般使用S型曲线,S型曲线光滑,速度不突变.
单片机速度控制原理
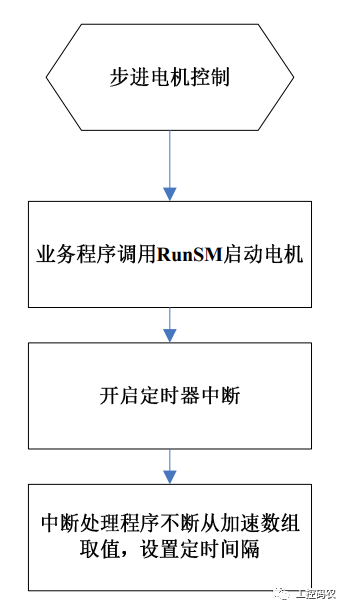
单片机通过调节频率控制电机速度,频率是单片机定时器的定时间隔决定的,只需要在定时器中断处理程序里边翻转脉冲输出端口即可.单片机的RAM和CPU不是很快,定时器的间隔使用查表的方法来获取,效率比较高.
控制流程
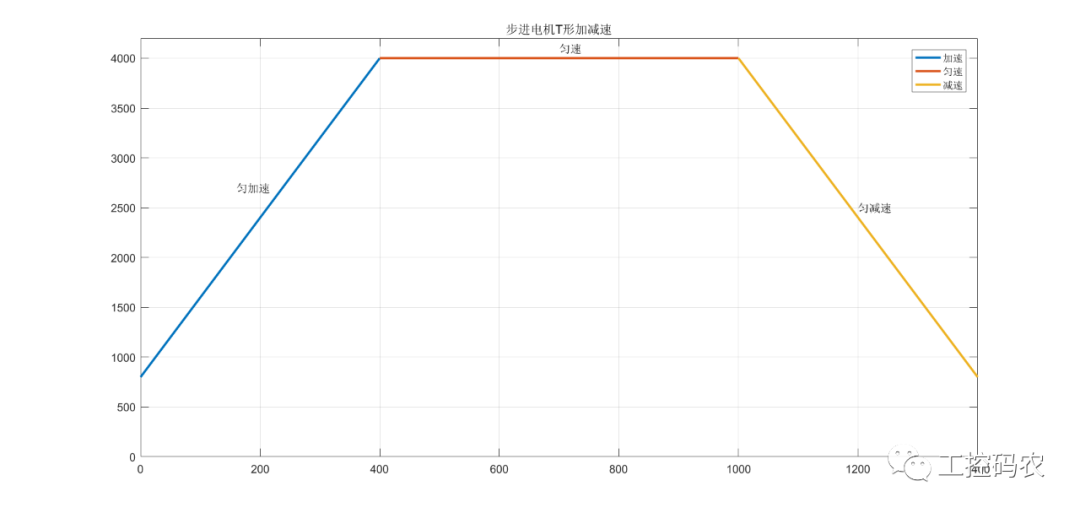
T型曲线
T型曲线的加速减阶段是线性加减速的,整个运动[加速,匀速,减速]速度变化看起来像一个等腰梯形.
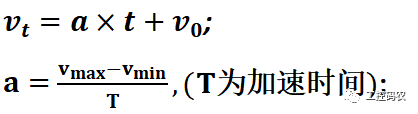
加速阶段就是一个一次线性函数,斜率不变[加速度不变],公式如下:
单片机生成加速数组代码:
//生成T形加速数组
//Vmin:起始速度(pulse/s)
//Vmax:最大速度,即匀速速度(pulse/s)
//AccTime:加速时间(ms)
//pBuffer:数组缓存区
//返回值:数组长度
int GenTTable(uint Vmin,uint Vmax,int AccTime,uint* pBuffer)
{
//计算加速度
uint a = (Vmax-Vmin)/AccTime;
uint v = Vmin;
uint t = 0;
int index = 0;
while(v<=Vmax)
{
v = a*t+Vmin;
pBuffer[index] = f/v; //f为定时器的工作频率
t += 1000000/v; //v的速度为pulse/s,一个脉冲的时间为:1/v s=1000000/v us
index++;
}
return index;
}
S形加减速
从T形加速曲线的图形,可以看出加速阶段转向匀速阶段时加速度是突然变为零的,这对大惯量的设备晃动比较大,要想设备晃动比较小,就需要加速过渡到匀速阶段是渐进光滑的,加速度不突变,进入到匀速阶段时加速度刚好为0.数学模型的S形曲线就是光滑,加速度不突变的。数学方程可以参考**逻辑斯蒂**曲线,下图是公式推导:
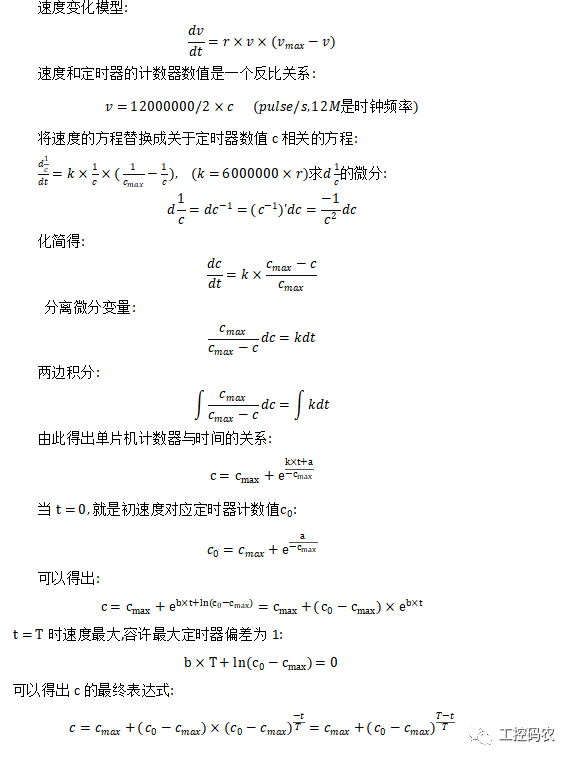
单片机S形曲线加速数组生成:
上面的公式推导有一个结论:
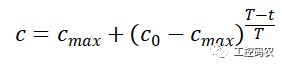
程序代码就是根据这个公式来生成数组数据
//生成S形加速数组
//Vmin:起始速度(pulse/s)
//Vmax:最大速度,即匀速速度(pulse/s)
//AccTime:加速时间(s)
//pBuffer:数组缓存区
//返回值:数组长度
int GenSTable(uint Vmin,uint Vmax,int AccTime,uint* pBuffer)
{
double tSum = 0;
double T= AccTime*f; //f为定时器工作频率
uint C0 = (uint)(f/Vmin);
uint Cmax = (uint)(f/Vmax);
uint index = 0;
while (tSum < T)
{
pBuffer[index]= (uint)(Cmax+pow(C0-Cmax,(T-tSum)/T));
tSum += pBuffer[index];
index++;
}
return index;
}
上面生成的加速数据就是定时器的间隔,可以把这边这份数据写到Flash的扇区,这样不用电机每次运动都来生成一次,减少单片机的运算量.也可使用上位机改变电机的起始速度,匀速速度,加速时间来调节电机加速性能,不用重新编译单片机代码,使用起来很方便.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6034文章
44532浏览量
633906 -
电机
+关注
关注
142文章
8964浏览量
145253 -
脉冲频率
+关注
关注
0文章
12浏览量
7963
发布评论请先 登录
相关推荐
STM32:F407步进电机S形加减速算法的实现相关资料分享
项目中对步进电机运行速度有了新要求,所以尝试实现梯形加减速算法,S形加减速算法。本文主要实现S形加减速算法。原理/思路步进电机有启动频率这一
发表于 06-28 10:07
启动停止频繁步进电机加减速算法目的是什么
电机加减速算法目的:对于上述2、3的场合,步进电机容易出现丢步和过冲甚至无法启动的现象,所以加入该算法来解决这一问题。3. 算法实现3.1加
发表于 07-07 07:58
步进电机驱动算法——S形加减速算法原理 精选资料下载
目录步进电机S形加减速简介七段S形加减速算法原理分析五段S形加减速算法实现算法分析查表法编程实现思路及方法S曲线加
发表于 07-08 09:18
F407步进电机梯形加减速算法是如何实现的?
使用梯形/S形加减速算法。加减速算法的实现中,我没有采用之前的定时器主从模式的方式。因为没有想到如何消除在定时器中断服务程序中切换PWM波输出频率时产生的短暂延时。看来很多文章,还是试着用翻转电平的方法来产生PWM波。原理/思路...
发表于 07-08 09:52
步进电机梯形匀加速算法是什么
最近公司的一个项目用带驱动器的步进电机,奈何,经理让我搞个匀加速的启动和停止。以前从来没考虑过算法的我,走了很多弯路,不过最后还是解决了这个问题。梯形加减速应该是指数加速算法和S型加
发表于 07-08 06:49
步进电机的基本参数及梯形加减速算法
在2021年接触到步进电机,当时是用来驱动热敏打印机,没有用到加减速算法,速度时间表好像是日本客户那边提供过来的,这次调试加减速算法,遇到了不少问题,在这里记录一下,希望能帮到未来对此有困惑的自己,如果能帮到其他人也算是有幸。
步进电机驱动算法之梯形加减速算法
目录 步进电机梯形加减速 梯形加减速和S型曲线比较 如何产生PWM波及TIMx定时器配置 梯形加减速算法原理分析 1.梯形加减速 2.步进
发表于 03-17 15:08
•7次下载






 工商网监
工商网监
评论