 多传感器融合成为方向!从前融合到后融合,激光雷达进阶3.0时代
多传感器融合成为方向!从前融合到后融合,激光雷达进阶3.0时代
电子发烧友网报道(文/莫婷婷)2020年之前,激光雷达市场国外企业一枝独秀,2020年,华为进军激光雷达市场,到了2021年,小鹏汽车推出首款搭载激光雷达的汽车,拉开国内车企激光雷达“上车”的序幕。可以期待的是,随着量产时代的到来,激光雷达将进入新的发展阶段。业内人士预计,下一代激光雷达威廉希尔官方网站
将朝着多传感器融合的方向演进。
但激光雷达产业的发展还存在一些核心问题亟待解决,例如激光雷达供应商如何在高性能、低成本的前提下,以及更大规模和场景下确保车规量产、交付;怎么才能实现激光雷达所支持的 L2、L3、 L4等更高层级的自动驾驶功能、更高精度的环境感知功能,并且让用户真正体验到激光雷达的价值。
上述都是在激光雷达2.0阶段下需要探讨的问题,未来进入激光雷达3.0,则需要关注如何提升驾驶安全、用户体验、改善感知融合,以及感受激光雷达核心价值。但是从2.0向3.0过渡,激光雷达威廉希尔官方网站 在助力自动驾驶威廉希尔官方网站 演进的过程中还面临诸多方面的挑战。
探维科技创始人王世玮认为自动驾驶感知困局是Robotaxi传感器性能不断提高时,融合方案并没有得到很好的结果。车上传感器形态持续演进,在能够降低成本的前提下,厂商需要考虑车规量产,并且要将硬件方案整合到量产车型的配置中,与车身进行融合设计。
例如在汽车厂商中,特斯拉在自动驾驶传感器的使用上一直在寻找最佳方案。此前,特斯拉采用的是纯视觉方案,2022年年底,4D毫米波雷达凭借成本优势,且分辨率更高,被赛灵思、博世、华为等越来越多厂商所关注,并且特斯拉极有可能将其加入汽车中。4D毫米波雷达也因此被业内人士认为是激光雷达的平替产品。
可以发现,智能汽车中,传感器不仅仅是激光雷达。Model 3配备8个摄像头、1个毫米波雷达、12个超声波雷达。小鹏P5配备了9个摄像头、2个激光雷达、4个全景摄像头、5个毫米波雷达和12个超声波传感器。探维科技也已经与合创汽车联合打造了一款搭载激光雷达的MPV,这也是合创V09目前唯一搭载激光雷达的MPV,并且全车配备了24个传感器。
当传感器的种类数量增加,汽车厂商必须考虑激光雷达与不同传感器之间的配合,在算法层、决策层面都要有取舍。不管是系统集成商还是主机厂,传感器之间如何配合对他们来说都是极大的挑战。那么,该如何让智能汽车的各个传感器与激光雷达实现更好地配合呢?
据了解,目前在车载端,激光雷达和其他传感器之间的配合主要是采用后融合方案,各个传感器独立做感知算法,再把结构化的数据做融合,通过系统层做综合判断和决策。但目标级图像后融合还在一些威廉希尔官方网站 难题,比如融合精度低、时间同步困难,系统标定方案复杂、需要融合补偿算法等。此外,由于是后融合的架构,因此是先感知再融合,在整个决策过程当中还会涉及关键信息的丢失、误检率、漏检率等,其他功能也会受到限制。
探维科技认为激光雷达 3. 0会往硬件级图像前融合发展,推出了Tanway Fusion解决激光雷达的兼容性、可靠性、适应性问题,能发挥出多传感器的优势。以其64线激光雷达为例,该产品的探测距离为200米,分辨率为0.16°*0.32°,空间同步精度可以达到为100米内3cm,时间同步精度达到微秒级。
激光雷达如何提高空间同步精度和时间同步精度呢?据了解,探维科技的方案把图像sensor加到既有的激光雷达硬件系统当中,内部再用同一套光源同步接收可见光、红外光,经过数据处理之后就可以拿到前融合的系统。其中融合精度是靠光学,即通过光路系统解决点对应的问题;时间同步是靠同一个硬件,探维科技用同一套时钟系统保证每一个测量点、像素,让时间同步精度保持微秒级。
从激光雷达1.0的概念,再到激光雷达2.0,再到3.0,激光雷达威廉希尔官方网站 在不断迭代,并且助力自动驾驶威廉希尔官方网站 的发展,未来随着威廉希尔官方网站 的成熟,自动驾驶感知能力也将不断提升。
但激光雷达产业的发展还存在一些核心问题亟待解决,例如激光雷达供应商如何在高性能、低成本的前提下,以及更大规模和场景下确保车规量产、交付;怎么才能实现激光雷达所支持的 L2、L3、 L4等更高层级的自动驾驶功能、更高精度的环境感知功能,并且让用户真正体验到激光雷达的价值。
上述都是在激光雷达2.0阶段下需要探讨的问题,未来进入激光雷达3.0,则需要关注如何提升驾驶安全、用户体验、改善感知融合,以及感受激光雷达核心价值。但是从2.0向3.0过渡,激光雷达威廉希尔官方网站 在助力自动驾驶威廉希尔官方网站 演进的过程中还面临诸多方面的挑战。
探维科技创始人王世玮认为自动驾驶感知困局是Robotaxi传感器性能不断提高时,融合方案并没有得到很好的结果。车上传感器形态持续演进,在能够降低成本的前提下,厂商需要考虑车规量产,并且要将硬件方案整合到量产车型的配置中,与车身进行融合设计。
例如在汽车厂商中,特斯拉在自动驾驶传感器的使用上一直在寻找最佳方案。此前,特斯拉采用的是纯视觉方案,2022年年底,4D毫米波雷达凭借成本优势,且分辨率更高,被赛灵思、博世、华为等越来越多厂商所关注,并且特斯拉极有可能将其加入汽车中。4D毫米波雷达也因此被业内人士认为是激光雷达的平替产品。
可以发现,智能汽车中,传感器不仅仅是激光雷达。Model 3配备8个摄像头、1个毫米波雷达、12个超声波雷达。小鹏P5配备了9个摄像头、2个激光雷达、4个全景摄像头、5个毫米波雷达和12个超声波传感器。探维科技也已经与合创汽车联合打造了一款搭载激光雷达的MPV,这也是合创V09目前唯一搭载激光雷达的MPV,并且全车配备了24个传感器。
当传感器的种类数量增加,汽车厂商必须考虑激光雷达与不同传感器之间的配合,在算法层、决策层面都要有取舍。不管是系统集成商还是主机厂,传感器之间如何配合对他们来说都是极大的挑战。那么,该如何让智能汽车的各个传感器与激光雷达实现更好地配合呢?
据了解,目前在车载端,激光雷达和其他传感器之间的配合主要是采用后融合方案,各个传感器独立做感知算法,再把结构化的数据做融合,通过系统层做综合判断和决策。但目标级图像后融合还在一些威廉希尔官方网站 难题,比如融合精度低、时间同步困难,系统标定方案复杂、需要融合补偿算法等。此外,由于是后融合的架构,因此是先感知再融合,在整个决策过程当中还会涉及关键信息的丢失、误检率、漏检率等,其他功能也会受到限制。
探维科技认为激光雷达 3. 0会往硬件级图像前融合发展,推出了Tanway Fusion解决激光雷达的兼容性、可靠性、适应性问题,能发挥出多传感器的优势。以其64线激光雷达为例,该产品的探测距离为200米,分辨率为0.16°*0.32°,空间同步精度可以达到为100米内3cm,时间同步精度达到微秒级。
激光雷达如何提高空间同步精度和时间同步精度呢?据了解,探维科技的方案把图像sensor加到既有的激光雷达硬件系统当中,内部再用同一套光源同步接收可见光、红外光,经过数据处理之后就可以拿到前融合的系统。其中融合精度是靠光学,即通过光路系统解决点对应的问题;时间同步是靠同一个硬件,探维科技用同一套时钟系统保证每一个测量点、像素,让时间同步精度保持微秒级。
从激光雷达1.0的概念,再到激光雷达2.0,再到3.0,激光雷达威廉希尔官方网站 在不断迭代,并且助力自动驾驶威廉希尔官方网站 的发展,未来随着威廉希尔官方网站 的成熟,自动驾驶感知能力也将不断提升。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51056浏览量
753259 -
激光雷达
+关注
关注
968文章
3971浏览量
189872
发布评论请先 登录
相关推荐
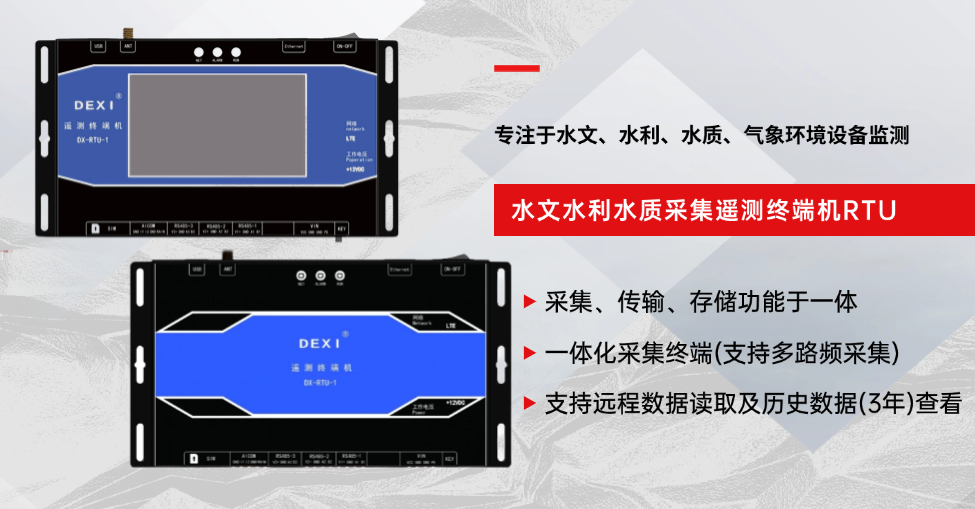
雨量水位数据采集终端机RTU:多传感器融合,水文监测数据远程查看
多传感器融合的雨量水位数据采集终端机RTU,正以其卓越的性能和全面的数据采集能力,成为水文监测领域的得力助手。让我们共同迎接精准监测的新时代
多传感器融合在自动驾驶中的应用趋势探究
整合分析,多传感器融合不仅能够弥补单一传感器的局限性,还大大提升了感知系统的精确性。 智能驾驶传感器的种类及威廉希尔官方网站
概述 1.1

激光雷达在SLAM算法中的应用综述
SLAM算法运行的重要传感器。基于激光雷达的SLAM算法,对激光雷达SLAM总体框架进行介绍,详细阐述前端里程计、后端优化、回环检测、地图构建模块的作用并总结所使用的算法;按由2D到 3D,单

激光雷达与其他传感器的比较
在现代科技领域,传感器威廉希尔官方网站
的发展日新月异,为各行各业提供了强大的数据支持。激光雷达作为一种高精度的遥感威廉希尔官方网站
,近年来在多个领域得到了广泛应用。然而,激光雷达并非万能,它与其他传感器相比,
MSP430F5xx系列上使用方向余弦矩阵算法的九轴传感器融合
电子发烧友网站提供《MSP430F5xx系列上使用方向余弦矩阵算法的九轴传感器融合.pdf》资料免费下载
发表于 10-18 10:40
•0次下载


森思泰克全新推出96线激光雷达和192线激光雷达产品
多传感器融合方案是智能驾驶感知威廉希尔官方网站
的必然趋势。它以摄像头、毫米波雷达、超声波雷达以及激光雷达等多

未来已来,多传感器融合感知是自动驾驶破局的关键
的信息,将感知系统的感知维度扩展以实现多维度(多模态)感知目标的完整信息。如下图示例,芯片将摄像头图像数据,和雷达探测目标的距离、速度、散射截面R的感知数据,以及红外传感器探测的热辐射图像数据叠加组
发表于 04-11 10:26
深度解析:多传感器融合SLAM威廉希尔官方网站 全景剖析
SLAM中,先验值通常从一系列传感器获得,比如惯性测量单元(IMU)和编码器,而观测值则是通过GPS、相机和激光雷达等其他传感器获取的,后验
发表于 02-23 11:31
•3036次阅读

基于Transformer的多模态BEV融合方案
由于大量的相机和激光雷达特征以及注意力的二次性质,将 Transformer 架构简单地应用于相机-激光雷达融合问题是很困难的。
发表于 01-23 11:39
•824次阅读

华为激光雷达参数怎么设置
华为激光雷达是一种常用的传感器威廉希尔官方网站
,可用于距离测量和感应。它的参数设置对于确保其性能和功能至关重要。在本文中,我们将详细介绍华为激光雷达的参数设置以及其影响和应用。 首先,我们需要了解激光雷达
Spring Boot和飞腾派融合构建的农业物联网系统-改进自适应加权融合算法
用postman拉取融合结果如下:
改进前的融合结果 23.13,改进后的融合结果23.18,高精度传感器测量值23.25。
四、参考
发表于 01-06 12:18
【飞腾派4G版免费试用】Spring Boot和飞腾派融合构建的农业物联网系统-数据融合算法篇
本帖最后由 sda12138 于 2024-1-6 12:00 编辑
接上集:
上次实验我们已经完成个人中心的设计,本次实验主要完成内容是完成多传感器融合算法的设计。
一、背景
在智慧农业中农
发表于 12-26 20:59





 工商网监
工商网监
评论