 数字电源监控和遥测
数字电源监控和遥测
数字电源器件在启动和关断之间做什么?两个核心功能是监督和遥测。监控是一种快速作用的安全功能,可防止损坏设备和/或负载。遥测是一项持续的质量管理功能。
在这篇文章中,我们将研究一个典型的POL内部架构,并考虑它对电源系统设计的影响。
POL 内部结构
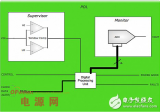
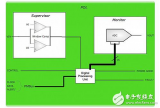
图 1 显示了包含三个主要模块的简化 POL:
Supervisor
Monitor
Digital Processing Unit
数字处理单元是大脑。(不显示的是核心功率转换。数字处理单元负责处理PMBus和控制输入,并断位POWER_GOOD和故障/。
大多数设备都有其中的几个,但为了简单起见,我们可以坚持输入和输出。
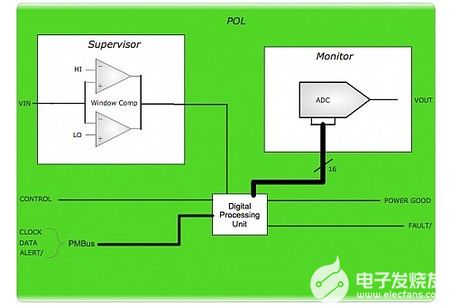
图1.POL 结构
监督
监控是一个快速作用的单比较器或窗口比较器。通常,输出绕过数字处理单元中的状态机,可以直接停止电源转换并置位FAULT/。之后更新数字处理单元,以便PMBus主机可以查询设备的故障寄存器。
监控器的目的是保护负载和设备,因此它以一定的精度换取速度。HI/LO 值通常存储在 NVROM 中,或由 PMBus 通过 VOUT_UV_FAULT_LIMIT 等命令进行编程。故障行为也存储在 NVROM 中,包括重试、重试延迟等。
监测
监控是通过ADC进行的高精度测量。数字处理单元通常作为状态机或软件环路实现,用于轮询ADC输出数据并由PMBus提供。监控数据还可以用于非常精确的数字处理单元伺服回路中,以提高输出精度。
故障
故障可能来自管理引擎或监视器。对于监控器,DAC提供比较器的基准,输出直接馈送到FAULT/引脚。对于监视器,数字处理单元使用数字比较器或软件条件指令向数字处理单元发送FAULT/引脚。
权衡取舍
POL 设计人员做出的权衡非常简单。安全性决定了哪些输入和输出具有监控器。监控权衡涉及精度,因为ADC占用空间和功耗,以及通道数量、多路复用器等。
作为系统设计人员,必须考虑他们的系统将使用数据做什么,以及数据的准确性。例如,典型用途是:
系统启动和调试
效率监控
能源监控
故障预测
优化(本地和全局)
精度增强(伺服)
例子
每个电源架构都是不同的,并且没有一套通用的权衡,因此我将提供一些使用主管和监视器来发挥您的想象力的示例。此外,一旦你看到什么是可能的,你可能会发现竞争优势。
管理引擎故障生成示例
本示例来自 LTC2974,这是一款管理四个 POL 的监控器 / 监视器器件。输出电压(它负责的POL)具有基于窗口比较器的监控器。
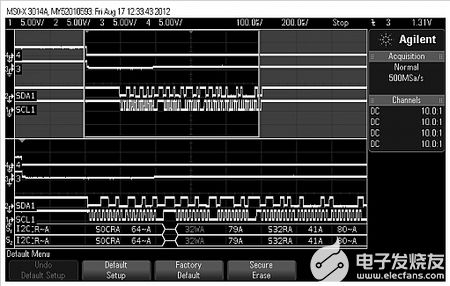
图2.管理引擎生成的故障
跟踪 4 是器件的 FAULT/ 引脚,跟踪 3 是器件的 ALERT/ 引脚。我将输出短路到地面。在此设备上,接地和故障/变低之间的延迟约为 12us。不久之后,我们也会收到警报/拉低。这些非常快,因为监控器绕过监控较慢的ADC所涉及的所有状态机,并直接产生故障。它还停止了电源转换。
查看 PMBus,PMBus 主机执行了警报响应地址 (ARA) 事务。地址 0 × 0C 放置在总线上,故障设备将 0 × 64 放在总线上。主机将此右移位,以获取地址 0 × 32。然后,主机通过在总线上放置地址 0 × 32,后跟命令字节 0 × 79 来读取故障寄存器。然后在总线上重复以地址 0 × 32 开头,并返回两个数据字节,状态字为 0 × 8041。
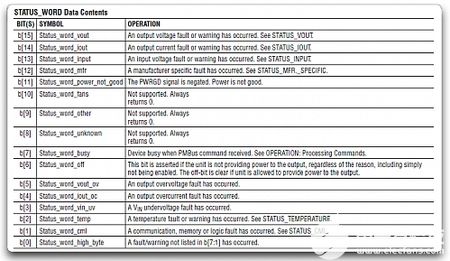
图3.错误字位
查看此器件的数据表,它显示了欠压故障。
我们还可以使用显示设备寄存器和状态的外部工具来查看这一点。
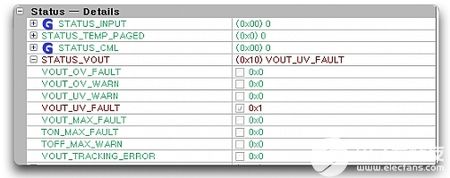
图4.故障状态
还记得我在第二篇文章中介绍的使用模型吗?
管理引擎导致支持两种模型的故障。它可以由 PMBus 或外部工具处理。
注意:我们将在以后的文章中看到它的实现,但基本上 ALERT/ 引脚与微控制器中断相关联。
温度监测示例
许多器件可以通过二极管监控内部芯片温度和外部温度。在本例 (LTC3880) 中,我有一个通过 PMBus 监控电源轨的电路板管理器,并具有一个 LCD 触摸屏显示器。
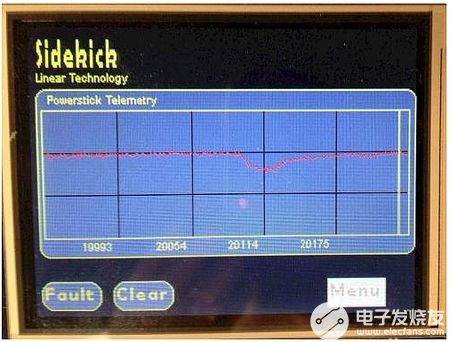
图5.温度监测
遥测图显示了内部芯片温度。当我将手指放在设备上并且它冷却下来时,图表中的下降发生了。图中的最小值和最大值分别为 30 度和 40 度。您可以看到测量非常好。
该设备将使用此温度来保护自己,但也可用于检测更细微的问题。如果添加 I2C温度监控器件和PCB周围放置传感器,在传感器和所有PMBus器件之间,可以得到相当好的电路板轮廓。您可以使用它通过控制负载来平衡温度,表征不同负载下的系统,或者只是向系统操作员发送警告消息,以便他们可以更换电路板并将其送去维修。
为了提高效率,也可以这样做。通过测量输入和输出电压及电流,您可以动态计算功率效率,并通过转移工作负载来使用这些信息进行系统优化,以使转换器更接近其最佳效率。您还可以查找可能在问题发生之前检测到问题的非典型模式。董事会经理通常具有通信接口,可以为您发送这些通知。
自治系统与托管系统
我想将这些性能参数放在使用模型的上下文中:
在我的第一篇文章中,我介绍了两种使用模型:
配置和部署
监控和行动
描述这些的另一种方法是自治系统与托管系统。自主系统是指电源转换器上电并完全独立于 PMBus 运行的系统,与模型 1 非常相似。受管系统主动使用 PMBus,与模型 2 非常相似。
这些模型具有不同的性能影响。PMBus有自己的性能,受到400Khz(典型)总线时钟的限制。监控性能与PMBus无关,无论是作为interwetten与威廉的赔率体系 比较器和直接逻辑实现,还是在数字处理单元中实现较慢的逻辑。
在托管系统(如 Monitor 和 Act)中,Act 部分具有与自治系统相同的性能,直到 PMBus 处于主机的决策循环中。一旦主机必须读取遥测数据并对设备应用一些功能或参数更改,性能通常就会受到 PMBus 的限制。
受管系统性能在性质上也有所不同,因为主机必须管理多个轨,其中的数量取决于系统体系结构。假设读取一个值并更改一个值作为响应需要 200uS(400kHz 总线)。假设我在主机的控制回路中有 10 个电源轨,现在我有 2mS。现在,添加一些我2用于监测温度的C芯片。在主机中添加与PMBus无关的其他功能,最终系统的响应时间比数字处理单元慢。此外,如果您以 100kHz 运行总线,因为一些较慢的 I2C设备,事情变得更慢了。
正是出于这个原因,使用了混合使用模型,其中关键功能全部由数字处理单元(和快速监控器)处理,不依赖于PMBus,而能耗和故障预测等更高级别的功能由PMBus主机处理。
出于同样的原因,当不需要更高级别的功能时,设备本身就可以正常工作,而PMBus是配置工具的推动者。特别是,PMBus工具对于电路板启动非常有用。工具以仪表板格式显示系统所有轨的状态:遥测、故障和设置。
回顾
大多数数字电源设备都有监控器和监视器。我将主管描述为快速作用的安全装置,将监视器描述为遥测的采样装置。这是一种方便的分类方法,但要小心术语,尤其是关于主管和故障的术语。有时,“Supervisor”一词应用于使用来自监视器的数据的故障生成威廉希尔官方网站 ,然后它通常比比较器具有更大的延迟。
这没有错。如果设备已经需要监视器,并且不需要超快地发生故障,为什么还要为不需要的比较器和逻辑付费呢?只需阅读数据手册并仔细查看其框图,即可了解器件的行为方式。芯片设计师非常擅长做出权衡,但只有您可以确认它们适用于您的应用。但一般来说,你会发现如果是安全问题,就会有比较器,如果是精度问题,就会有高精度ADC。
虽然主管的使用非常明显,但显示器有时被低估了,直到您希望拥有它们。很容易专注于调整电源轨尺寸、考虑瞬态响应和所有其他模拟行为,而不考虑系统级机会。但是,一旦您拥有 PMBus 及其所有控件、用于存储设置的 NVMRAM 和用于配置的软件工具,请考虑您可以如何处理实时数据。只要多付出一点努力,您就可以找到竞争优势。您也不必预先实施所有固件。固件的好处是您无需更改硬件即可升级它。
审核编辑:郭婷
-
电源
+关注
关注
184文章
17706浏览量
249986 -
显示器
+关注
关注
21文章
4971浏览量
139934 -
POL
+关注
关注
0文章
81浏览量
27460
发布评论请先 登录
相关推荐


一周推荐:Analog Devices数字电源系统管理 (PSM) 器件
用于负载点应用的遥测威廉希尔官方网站
数字电源器件另一端的精度重要吗?
航天级IC如何改进遥测电路设计
数字电源解决方案,基站电源设计
数字电源监视系统及其遥测威廉希尔官方网站 的浅析

双通道13Aμ模块稳压器,用于远程监控和控制电源





 工商网监
工商网监
评论