 【Renesas RA6M4开发板之I2C读取BMP180气压温度】
【Renesas RA6M4开发板之I2C读取BMP180气压温度】
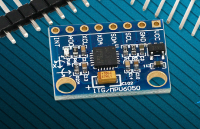
1.0 BMP180
此图转载钦源盛数码专营店
本篇通过Renesas RA6M4开发板采用I2C读取BMP180传感器的气压温度示例程序演示。
1.1 BMP180介绍
1、BMP180是一款高精度、小体积、低能耗的压力传感器,可以应用在移动设备中;
2、精度低,可以达到0.03hPa;
3、BMP180采用强大的8-pin陶瓷无引线芯片承载(LCC)超薄封装,可以通过I2C总线直接与各种微处理器相连。
1.2 BMP180特点
1.压力范围:300---1100hPa(海拔9000米一500米)
2.电源电压:5V
3.低功耗:在标准模式下5uA
4.高精度:低功耗模式下,分辨率为0.06hPa(0.5米)
5.高线性模式下,分辨率为0.03hPa(0.25米)
6.带温度输出
7.I2C通信方式8.带温度补偿
9.MSL1秒响应
10.待机电流:0.1uA
11.需在气体环境中工作,不可测量液体和反接电源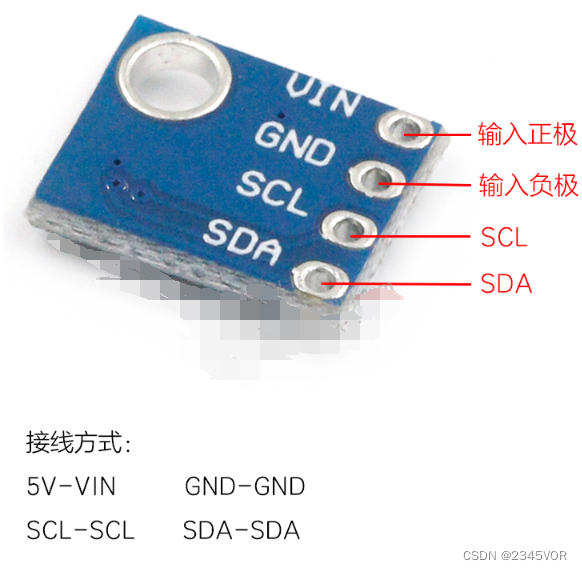
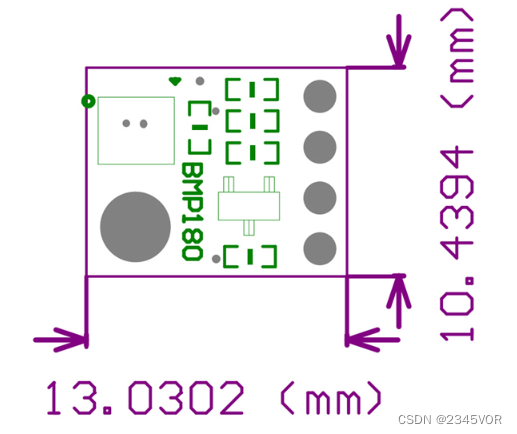
尺寸大小如下:
1.3 产品应用1.GPS导航(航位推算,上下桥检测等)
⒉.室内室外导航
3.休闲、体育等监测
4.天气预报
5.垂直速度指示(上升/下沉速度)
实现功能:
I2C读取BMP180传感器的气压温度
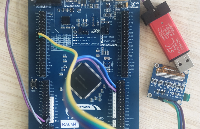
2、RA6M4开发板
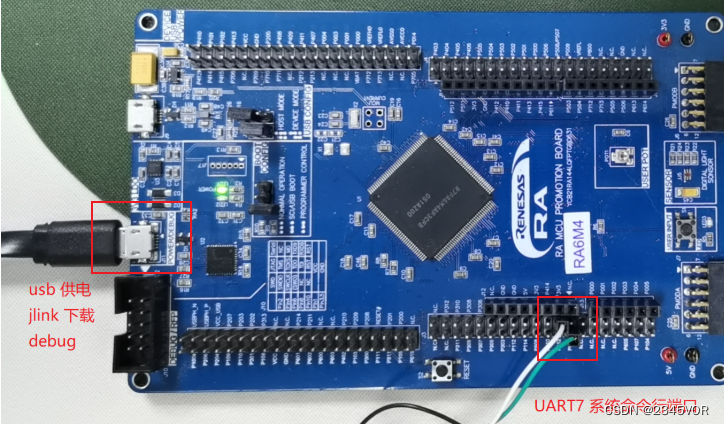
3、USB下载线,ch340串口和附带6根母母线, rx—p613;tx—p614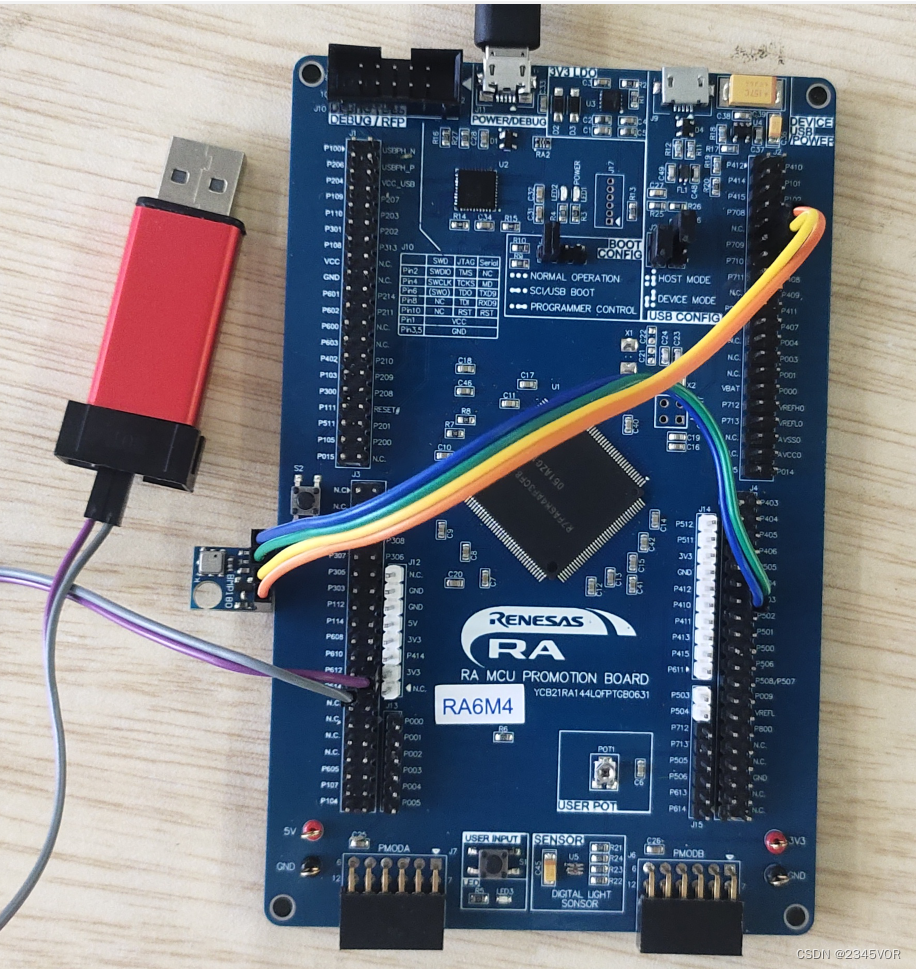
2.2 软件配置Renesas RA6M4开发板环境配置参照:【基于 RT-Thread Studio的CPK-RA6M4 开发板环境搭建】
1、新建项目RA6M4-bmp180工程
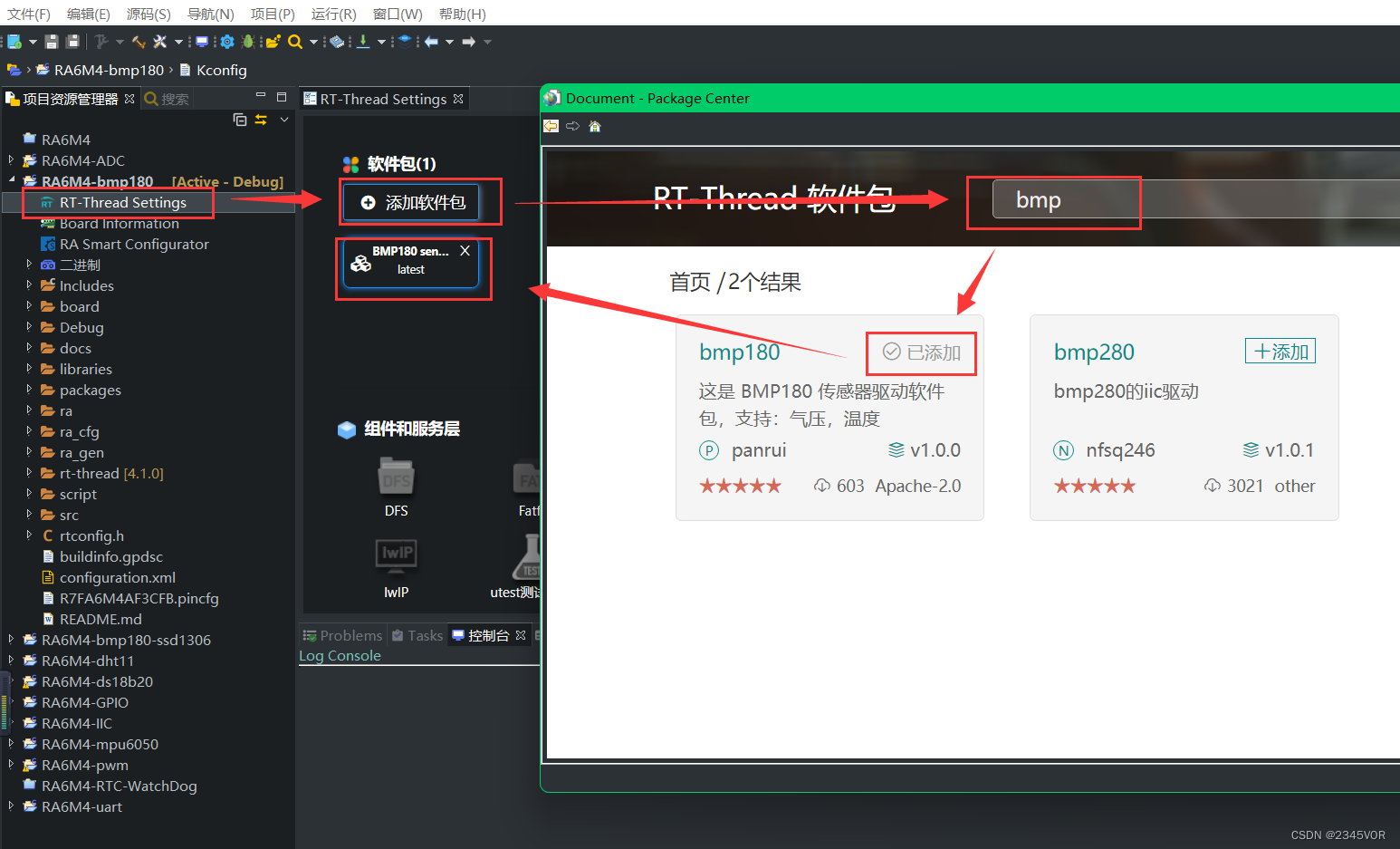
2、点击RT-theard Setting,在软件包下添加软件包,然后搜索bmp相关软件支持包,点击添加即可,然后出现对应包。
3、配置ssd306,右键选择配置项
4、在软件包中开启示例程序。

5、在硬件中,启动I2C,设置端口SDA—p503;SCL—p504
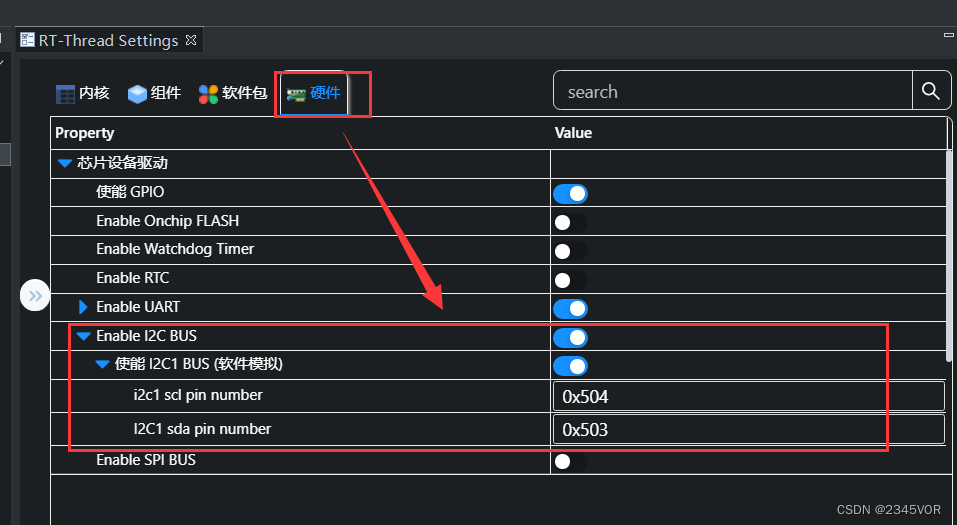
6、全部保存刚刚的配置,更新当前配置文件
保存完是灰色,没有保存是蓝色。
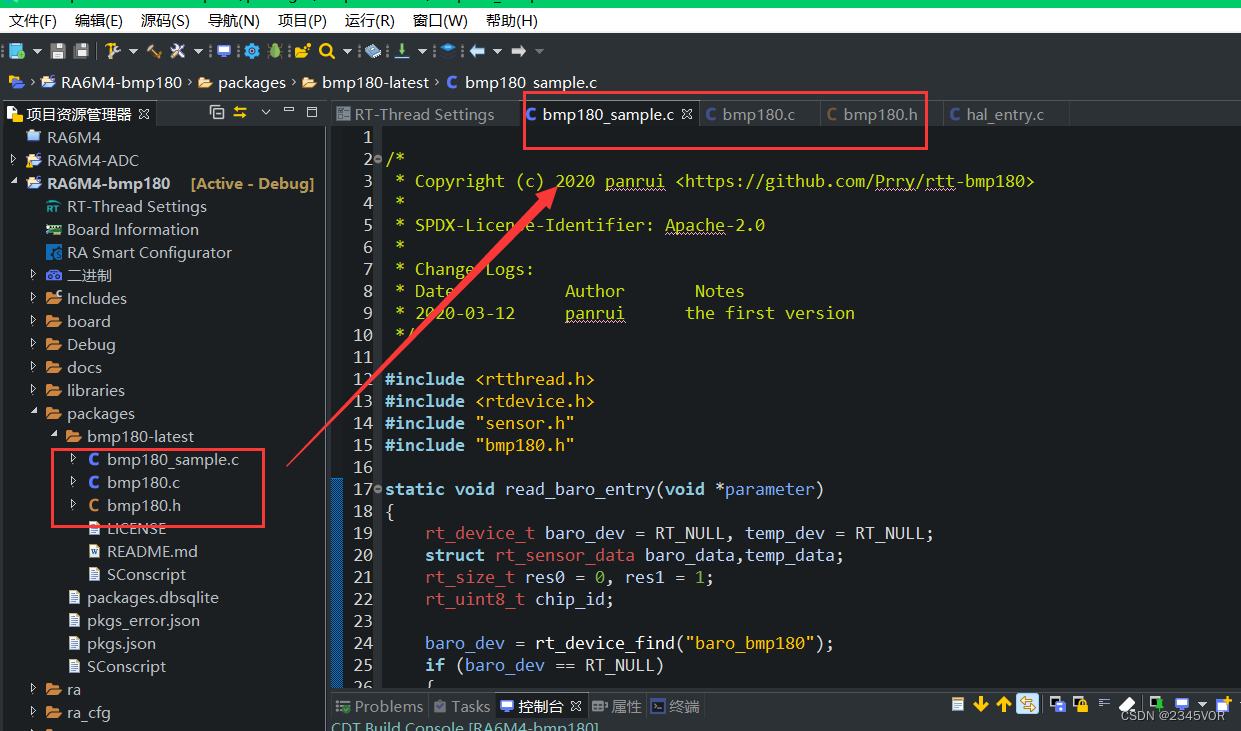
- 代码分析1、刚刚加载软件包在packages文件夹下,bmp180.c和bmp180_sample.c示例代码更改为如下
(或者头文件添加#include "bsp_api.h",否则会报错unitx_t,根据提示全部改为rt_unitx_t也OK,下面是第二种方法)
bmp180.c
/* * Copyright (c) 2020 panrui
#include
#include
#include
#include "sensor.h"
#include "bmp180.h"
#define PKG_USING_BMP180
#ifdef PKG_USING_BMP180
#define BMP180_ADDR 0x77 /* i2c slave address */
#define BMP_REG_CHIP_ID 0xD0
#define BMP_REG_RESET 0xE0
#define BMP_REG_CTRL_ADDR 0xF4
#define BMP_REG_AD_MSB 0xF6
#define BMP_REG_AD_LSB 0xF7
#define BMP_REG_AD_XLSB 0xF8
#define BMS_CAL_AC1 0xAA
#define BMP_REG_CTRL_TEMP 0x2E
#define BMP_REG_CTRL_POSS0 0x34
#define BMP_REG_CTRL_POSS1 0x74
#define BMP_REG_CTRL_POSS2 0xB4
#define BMP_REG_CTRL_POSS3 0xF4
#define BMP_REG_RESET_VALUE 0xB6
#define BMP180_I2C_BUS "i2c1" /* i2c linked */
#define BMP180_DEVICE_NAME "bmp180" /* register device name */
/* bmp clalc param */
struct bmp180_calc
{
short ac1;
short ac2;
short ac3;
short b1;
short b2;
short mb;
short mc;
short md;
unsigned short ac4;
unsigned short ac5;
unsigned short ac6;
};
/* bmp180 private data */
struct bmp180_dev
{
struct bmp180_calc calc_param;
struct rt_i2c_bus_device *i2c_bus; /* linked i2c bus */
};
static rt_err_t bmp180_read_regs(rt_sensor_t psensor, rt_uint8_t reg, rt_uint8_t *data, rt_uint8_t data_size)
{
struct rt_i2c_msg msg[2];
struct bmp180_dev *dev = RT_NULL;
struct rt_i2c_bus_device *i2c_bus = RT_NULL;
rt_uint32_t slave_addr = 0;
slave_addr = (rt_uint32_t)psensor->config.intf.user_data; /* get i2c slave address */
dev = (struct bmp180_dev*)psensor->parent.user_data;/* bmp180 private data */
i2c_bus = (struct rt_i2c_bus_device*)dev->i2c_bus; /* get i2c bus device */
msg[0].addr = (rt_uint8_t)slave_addr;
msg[0].flags = RT_I2C_WR;
msg[0].len = 1;
msg[0].buf = ®
msg[1].addr = (rt_uint8_t)slave_addr;
msg[1].flags = RT_I2C_RD;
msg[1].len = data_size;
msg[1].buf = data;
if(rt_i2c_transfer(i2c_bus, msg, 2) == 2)
{
return RT_EOK;
}
else
{
LOG_E("i2c bus read failed!
");
return -RT_ERROR;
}
}
static rt_err_t bmp180_write_regs(rt_sensor_t psensor, rt_uint8_t reg, rt_uint8_t *data, rt_uint8_t data_size)
{
struct rt_i2c_msg msg[2];
struct bmp180_dev *dev = RT_NULL;
struct rt_i2c_bus_device *i2c_bus;
rt_uint32_t slave_addr = 0;
slave_addr = (rt_uint32_t)psensor->config.intf.user_data;
dev = (struct bmp180_dev*)psensor->parent.user_data;
i2c_bus = (struct rt_i2c_bus_device*)dev->i2c_bus;
msg[0].addr = (rt_uint8_t)slave_addr;
msg[0].flags = RT_I2C_WR;
msg[0].len = 1;
msg[0].buf = ®
msg[1].addr = (rt_uint8_t)slave_addr;
msg[1].flags = RT_I2C_WR | RT_I2C_NO_START;
msg[1].len = data_size;
msg[1].buf = data;
if(rt_i2c_transfer(i2c_bus, msg, 2) == 2)
{
return RT_EOK;
}
else
{
LOG_E("i2c bus write failed!
");
return -RT_ERROR;
}
}
static rt_err_t bmp180_write_reg(rt_sensor_t psensor, rt_uint8_t reg, rt_uint8_t data)
{
return bmp180_write_regs(psensor, reg, &data, 1);
}
static long bmp180_read_ut(rt_sensor_t psensor)
{
rt_uint8_t buf[2] = {
0};
long data = 0;
bmp180_write_reg(psensor, BMP_REG_CTRL_ADDR, BMP_REG_CTRL_TEMP);
rt_thread_delay(1); /* max conversion time: 4.5ms */
bmp180_read_regs(psensor, BMP_REG_AD_MSB, buf, 2);
data = (buf[0]<<8) | buf[1];
return data;
}
static long bmp180_read_up(rt_sensor_t psensor)
{
rt_uint8_t buf[2] = {
0};
long data = 0;
bmp180_write_reg(psensor, BMP_REG_CTRL_ADDR, BMP_REG_CTRL_POSS0);
rt_thread_delay(1); /* max conversion time: 4.5ms */
bmp180_read_regs(psensor, BMP_REG_AD_MSB, buf, 2);
data = (buf[0]<<8) | buf[1];
return data;
}
static rt_size_t bmp180_polling_get_data(rt_sensor_t psensor, struct rt_sensor_data *sensor_data)
{
long x1, x2, b5, b6, x3, b3, p;
unsigned long b4, b7;
short temperature=0;
long ut,up,pressure=0;
struct bmp180_dev *dev = RT_NULL;
struct bmp180_calc *param = RT_NULL;
ut = bmp180_read_ut(psensor);
up = bmp180_read_up(psensor);
dev = (struct bmp180_dev*)psensor->parent.user_data;/* bmp180 private data */
param = &dev->calc_param; /* get calc param */
/* temperature calc */
x1 = (((long)ut - (long)param->ac6)*(long)param->ac5) >> 15;
x2 = ((long)param->mc << 11) / (x1 + param->md);
b5 = x1 + x2;
temperature = ((b5 + 8) >> 4);
/* pressure calc */
b6 = b5 - 4000;
x1 = (param->b2 * (b6 * b6)>>12)>>11;
x2 = (param->ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)param->ac1)*4 + x3)<<0) + 2)>>2;
x1 = (param->ac3 * b6)>>13;
x2 = (param->b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (param->ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>0));
if (b7 < 0x80000000)
{
p = (b7<<1)/b4;
}
else
{
p = (b7/b4)<<1;
}
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
pressure = p+((x1 + x2 + 3791)>>4);
if(psensor->info.type == RT_SENSOR_CLASS_BARO)
{
/* actual barometric */
sensor_data->type = RT_SENSOR_CLASS_BARO;
sensor_data->data.baro = pressure;
sensor_data->timestamp = rt_sensor_get_ts();
}
else if(psensor->info.type == RT_SENSOR_CLASS_TEMP)
{
/* actual temperature */
sensor_data->type = RT_SENSOR_CLASS_TEMP;
sensor_data->data.temp = temperature;
sensor_data->timestamp = rt_sensor_get_ts();
}
else
{
return 0;
}
return 1;
}
static rt_size_t bmp180_fetch_data(struct rt_sensor_device *psensor, void *buf, rt_size_t len)
{
RT_ASSERT(buf);
RT_ASSERT(psensor);
//if(psensor->parent.open_flag & RT_DEVICE_FLAG_RDONLY)
if(psensor->config.mode == RT_SENSOR_MODE_POLLING)
{
return bmp180_polling_get_data(psensor, buf);
}
return 0;
}
static rt_err_t bmp180_control(struct rt_sensor_device *psensor, int cmd, void *args)
{
rt_err_t ret = RT_EOK;
rt_uint8_t *chip_id;
RT_ASSERT(psensor);
switch (cmd)
{
/* read bmp180 id */
case RT_SENSOR_CTRL_GET_ID:
chip_id = (rt_uint8_t*)args;
ret = bmp180_read_regs(psensor, BMP_REG_CHIP_ID, chip_id, 1);
break;
default:
break;
}
return ret;
}
static struct rt_sensor_ops bmp180_ops =
{
bmp180_fetch_data,
bmp180_control,
};
int rt_hw_bmp180_init(const char *name, struct rt_sensor_config *cfg)
{
rt_err_t ret = RT_EOK;
rt_sensor_t sensor_baro = RT_NULL, sensor_temp = RT_NULL;
struct rt_sensor_module *module = RT_NULL;
struct bmp180_dev *bmp180 = RT_NULL;
rt_uint8_t bmbuf[22] = {
0};
bmp180 = rt_calloc(1, sizeof(struct bmp180_dev));
if(bmp180 == RT_NULL)
{
LOG_E("malloc memory failed
");
ret = -RT_ERROR;
goto __exit;
}
bmp180->i2c_bus = rt_i2c_bus_device_find(cfg->intf.dev_name);
if(bmp180->i2c_bus == RT_NULL)
{
LOG_E("i2c bus device %s not found!
", cfg->intf.dev_name);
ret = -RT_ERROR;
goto __exit;
}
module = rt_calloc(1, sizeof(struct rt_sensor_device));
if(module == RT_NULL)
{
LOG_E("malloc memory failed
");
ret = -RT_ERROR;
goto __exit;
}
module->sen[0] = sensor_baro;
module->sen[1] = sensor_temp;
module->sen_num = 2;
/* barometric pressure sensor register */
{
sensor_baro = rt_calloc(1, sizeof(struct rt_sensor_device));
if (sensor_baro == RT_NULL)
{
goto __exit;
}
rt_memset(sensor_baro, 0x0, sizeof(struct rt_sensor_device));
sensor_baro->info.type = RT_SENSOR_CLASS_BARO;
sensor_baro->info.vendor = RT_SENSOR_VENDOR_BOSCH;
sensor_baro->info.model = "bmp180_baro";
sensor_baro->info.unit = RT_SENSOR_UNIT_PA;
sensor_baro->info.intf_type = RT_SENSOR_INTF_I2C;
sensor_baro->info.range_max = 110000; /* 1Pa */
sensor_baro->info.range_min = 30000;
sensor_baro->info.period_min = 100; /* read ten times in 1 second */
rt_memcpy(&sensor_baro->config, cfg, sizeof(struct rt_sensor_config));
sensor_baro->ops = &bmp180_ops;
sensor_baro->module = module;
ret = rt_hw_sensor_register(sensor_baro, name, RT_DEVICE_FLAG_RDWR, (void*)bmp180);
if (ret != RT_EOK)
{
LOG_E("device register err code: %d", ret);
goto __exit;
}
}
/* temperature sensor register */
{
sensor_temp = rt_calloc(1, sizeof(struct rt_sensor_device));
if (sensor_temp == RT_NULL)
{
goto __exit;
}
rt_memset(sensor_temp, 0x0, sizeof(struct rt_sensor_device));
sensor_temp->info.type = RT_SENSOR_CLASS_TEMP;
sensor_temp->info.vendor = RT_SENSOR_VENDOR_BOSCH;
sensor_temp->info.model = "bmp180_temp";
sensor_temp->info.unit = RT_SENSOR_UNIT_DCELSIUS;
sensor_temp->info.intf_type = RT_SENSOR_INTF_I2C;
sensor_baro->info.range_max = 850; /* 0.1C */
sensor_baro->info.range_min = -400;
sensor_temp->info.period_min = 100; /* read ten times in 1 second */
rt_memcpy(&sensor_temp->config, cfg, sizeof(struct rt_sensor_config));
sensor_temp->ops = &bmp180_ops;
sensor_temp->module = module;
ret = rt_hw_sensor_register(sensor_temp, name, RT_DEVICE_FLAG_RDWR, (void*)bmp180);
if (ret != RT_EOK)
{
LOG_E("device register err code: %d", ret);
goto __exit;
}
}
/* bmp180 read calc param */
ret = bmp180_read_regs(sensor_baro, BMS_CAL_AC1, bmbuf, 22);
if(ret == RT_EOK)
{
bmp180->calc_param.ac1 = (bmbuf[0]<<8)|bmbuf[1];
bmp180->calc_param.ac2 = (bmbuf[2]<<8)|bmbuf[3];
bmp180->calc_param.ac3 = (bmbuf[4]<<8)|bmbuf[5];
bmp180->calc_param.ac4 = (bmbuf[6]<<8)|bmbuf[7];
bmp180->calc_param.ac5 = (bmbuf[8]<<8)|bmbuf[9];
bmp180->calc_param.ac6 = (bmbuf[10]<<8)|bmbuf[11];
bmp180->calc_param.b1 = (bmbuf[12]<<8)|bmbuf[13];
bmp180->calc_param.b2 = (bmbuf[14]<<8)|bmbuf[15];
bmp180->calc_param.mb = (bmbuf[16]<<8)|bmbuf[17];
bmp180->calc_param.mc = (bmbuf[18]<<8)|bmbuf[19];
bmp180->calc_param.md = (bmbuf[20]<<8)|bmbuf[21];
}
else
{
LOG_E("bmp180 read calc param failed
");
goto __exit;
}
return RT_EOK;
__exit:
if(sensor_baro)
{
rt_free(sensor_baro);
}
if(sensor_temp)
{
rt_free(sensor_temp);
}
if(module)
{
rt_free(module);
}
if (bmp180)
{
rt_free(bmp180);
}
return ret;
}
#endif /* PKG_USING_BMP180 */
bmp180_sample.c
/* * Copyright (c) 2020 panrui
#include
#include
#include "sensor.h"
#include "bmp180.h"
static void read_baro_entry(void *parameter)
{
rt_device_t baro_dev = RT_NULL, temp_dev = RT_NULL;
struct rt_sensor_data baro_data,temp_data;
rt_size_t res0 = 0, res1 = 1;
rt_uint8_t chip_id;
baro_dev = rt_device_find("baro_bmp180");
if (baro_dev == RT_NULL)
{
rt_kprintf("not found baro_bmp180 device
");
return;
}
if (rt_device_open(baro_dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK)
{
rt_kprintf("open baro_180 failed
");
return;
}
temp_dev = rt_device_find("temp_bmp180");
if (temp_dev == RT_NULL)
{
rt_kprintf("not found temp_bmp180 device
");
return;
}
if (rt_device_open(temp_dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK)
{
rt_kprintf("open temp_bmp180 failed
");
return;
}
rt_device_control(baro_dev, RT_SENSOR_CTRL_SET_ODR, (void *)(1));/* 1Hz read */
rt_device_control(temp_dev, RT_SENSOR_CTRL_SET_ODR, (void *)(1));/* 1Hz read */
rt_device_control(temp_dev, RT_SENSOR_CTRL_GET_ID, (void*)&chip_id);
rt_kprintf("bmp180 chip ID [0x%X]
", chip_id);
while (1)
{
res0 = rt_device_read(baro_dev, 0, &baro_data, 1);
res0 = rt_device_read(temp_dev, 0, &temp_data, 1);
if (res0==0 || res1==0)
{
rt_kprintf("read data failed! result is %d,%d
", res0, res1);
rt_device_close(baro_dev);
rt_device_close(temp_dev);
return;
}
else
{
rt_kprintf("baro[%dPa],temp[%d.%dC],timestamp[%d]
", baro_data.data.baro,
temp_data.data.temp/10-42, temp_data.data.temp%10,
temp_data.timestamp);
}
rt_thread_delay(500);
}
}
static int baro_read_sample(void)
{
rt_thread_t baro_thread;
baro_thread = rt_thread_create("baro_r",
read_baro_entry,
RT_NULL,
1024,
RT_THREAD_PRIORITY_MAX / 2,
20);
if (baro_thread != RT_NULL)
{
rt_thread_startup(baro_thread);
}
return RT_EOK;
}
INIT_APP_EXPORT(baro_read_sample);
static int rt_hw_bmp180_port(void)
{
struct rt_sensor_config cfg;
cfg.intf.dev_name = "i2c1"; /* i2c bus */
cfg.intf.user_data = (void *)0x77; /* i2c slave addr */
rt_hw_bmp180_init("bmp180", &cfg); /* bmp180 */
return RT_EOK;
}
INIT_COMPONENT_EXPORT(rt_hw_bmp180_port);
2、此库包含读取I2C信息,解调,并且添加一个进程、每秒自动打印温度和气压以及时间。
关键打印代码以及自行校准两项参数
rt_kprintf("baro[%dPa],temp[%d.%dC],timestamp[%d]
", baro_data.data.baro,
temp_data.data.temp/10-42, temp_data.data.temp%10,
temp_data.timestamp);
3、main.c文件在re_gen文件夹下,主程序围绕“hal_entry();”函数(在src文件夹),这些默认不变
- 下载验证1、编译重构
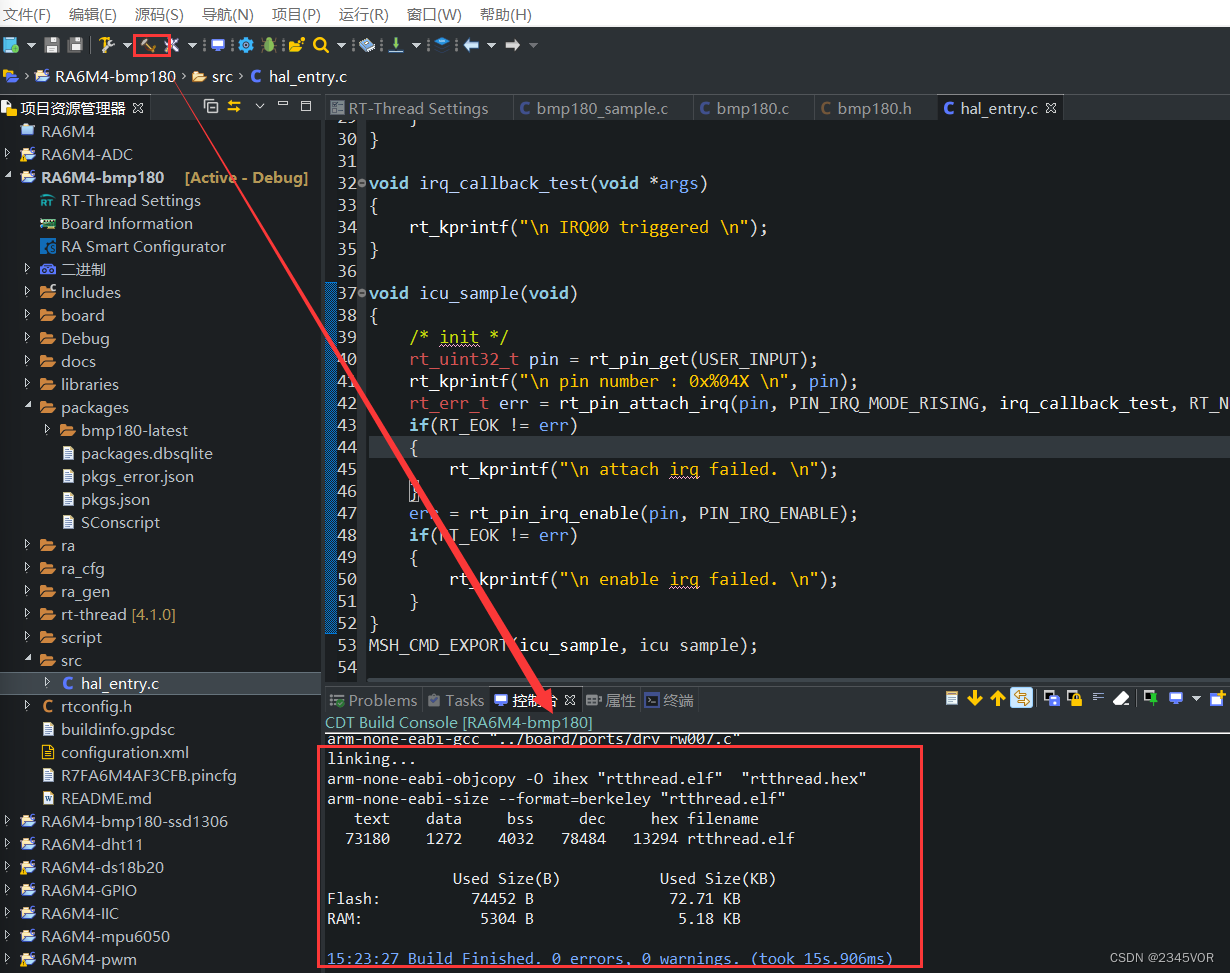
编译成功
2、下载程序
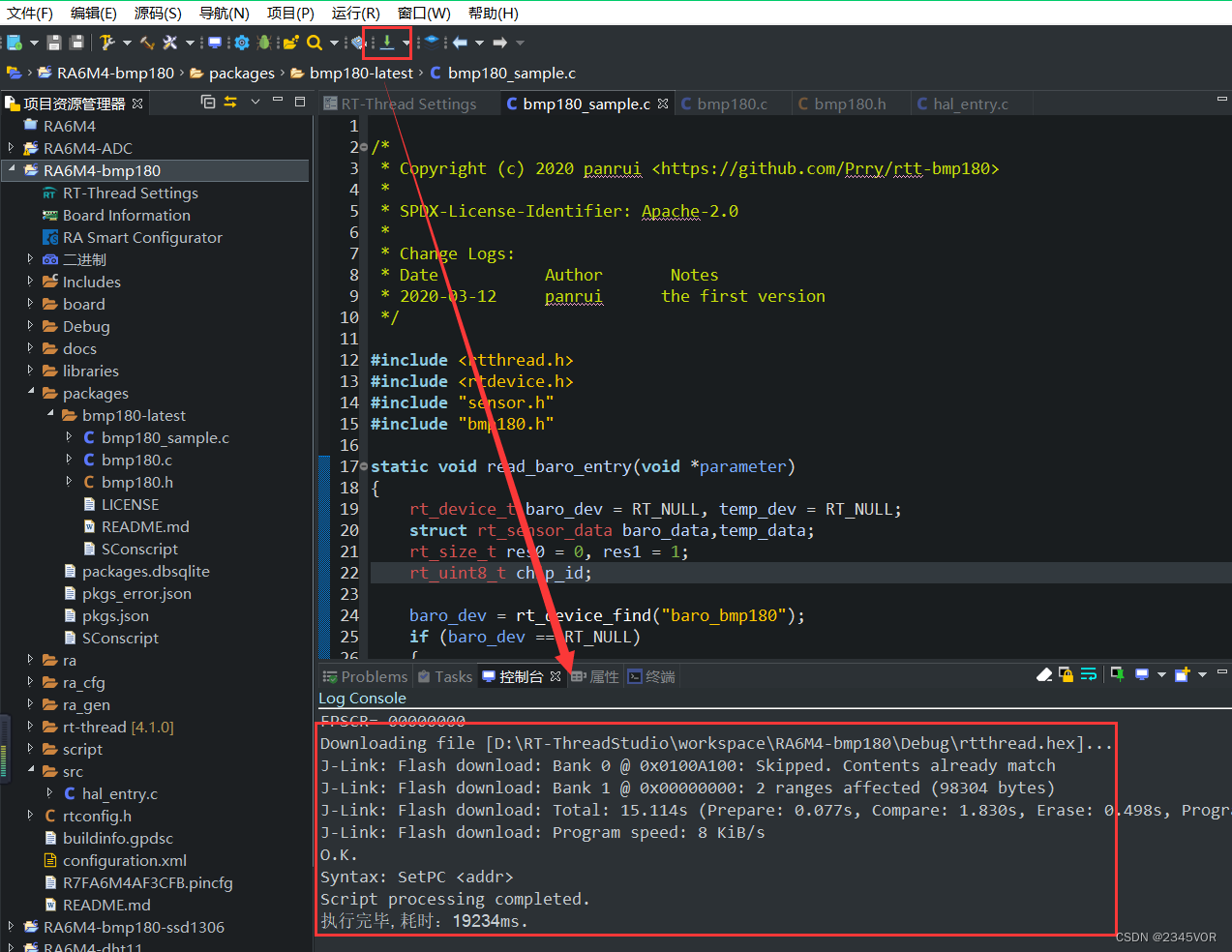
下载成功
3、CMD串口调试
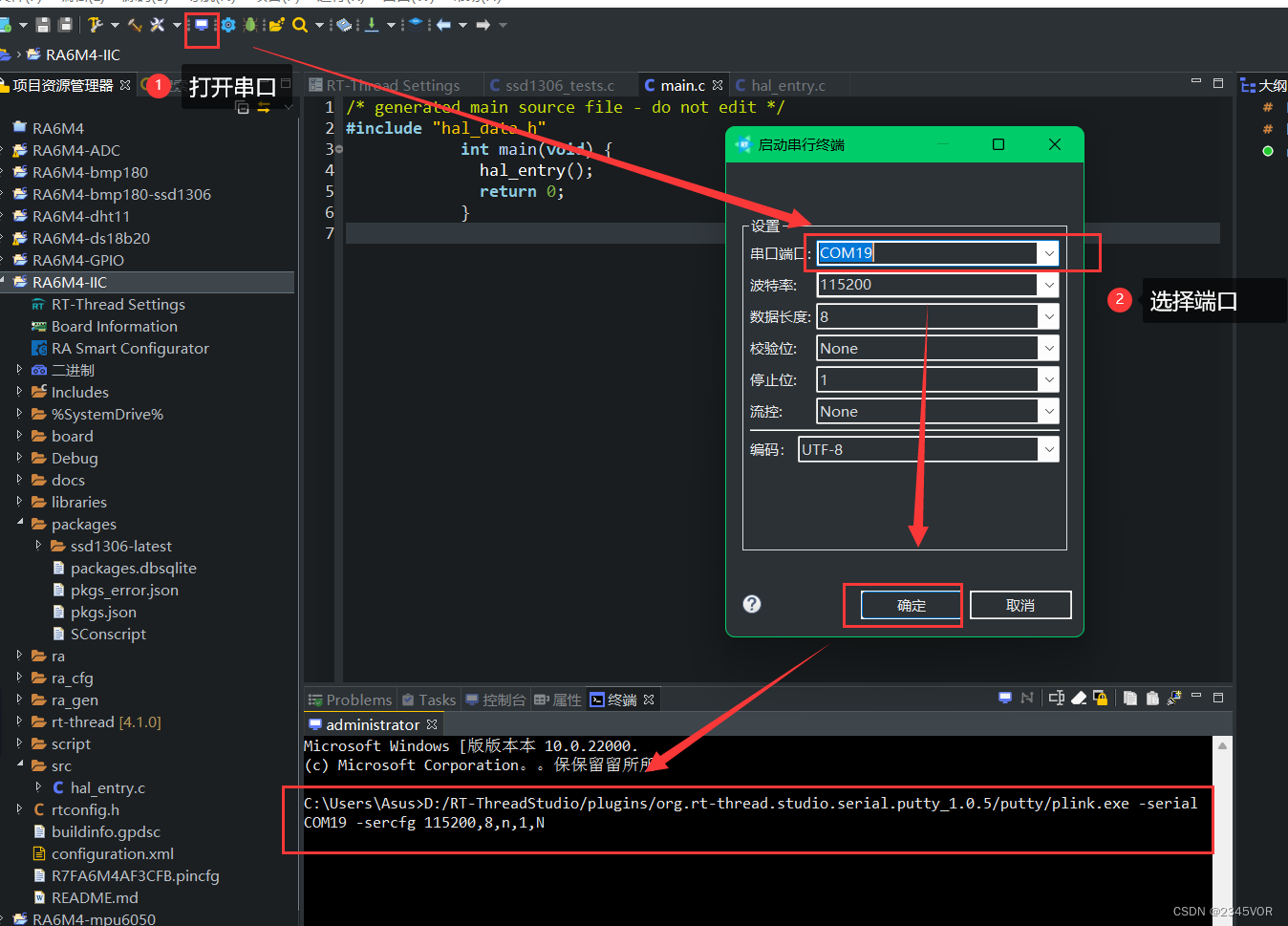
然后板载复位,开始串口打印显示!
效果如下
这样我们就可以天马行空啦!
审核编辑:汤梓红
-
I2C
+关注
关注
28文章
1486浏览量
123629 -
Renesas
+关注
关注
0文章
1757浏览量
22716 -
开发板
+关注
关注
25文章
5035浏览量
97382 -
RA6M4
+关注
关注
0文章
51浏览量
441
发布评论请先 登录
相关推荐
【Renesas RA6M4开发板之I2C(模拟)驱动ssd1306 OLED屏幕】
[MicroPython]STM32F407开发板控制BMP180测量气压
如何使用I2C来控制BMP180压强传感器?
定制BMP180 传感器的教程
NK-980IOT开发板的I2C读取BMP180测试步骤
BMP180
【开发板评测】Renesas RA6M4开发板之CAN
【开发板评测】Renesas RA6M4开发板之SDIO(SDHI)
【Renesas RA6M4开发板之I2C读取mpu6050】





 工商网监
工商网监
评论