 如何在PMSM中建立合适的坐标系(一)
如何在PMSM中建立合适的坐标系(一)
Clarke变换是“矢量坐标变换”中的一种变换方式,在永磁同步电机中,电动机的定子磁场是由定子的三相绕组的磁动势产生的,根据电动机旋转磁场理论就知,向对称的三相绕组中通以对称的三相正弦电流时,就会产生合成的磁动势,并以w的速度在空间中旋转。所以,为了简化交流电机的分析方法,Clarke提出了一种以电机定子为静止参考系的电机参数变换分析方式,即依据功率不变和磁势不变的原理,将定子三相物理量从三维坐标转换到二维坐标,简称3S/2S变换,其中S表示静止。
在PMSM中建立合适的坐标系
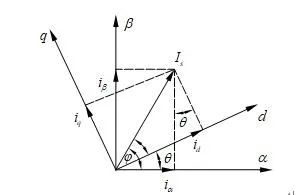
图1-1中两个坐标系,其中ABC是PMSM静止坐标系,另一个坐标系是PMSM经过Clarke要变换后的坐标系:
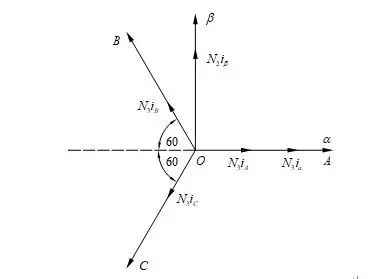
图1-1 Clarke坐标变换示意图
图1-1中PMSM三相绕组每相的有效线圈匝数为N3,两相绕组每相有效线圈匝数为N2,两种坐标系中每相的磁动势均为有效线圈匝数与该相电流的乘积。
原理分析
矢量坐标变换就是用磁势或者电流空间矢量来描述等效的三相磁场、两相磁场和旋转直流磁场,并对它们进行坐标变换。因此矢量坐标变化必须要遵循以下两个原则:
1、变换前后电流所产生的旋转磁场等效;
2、变换前后两系统的电动机功率不发生变化。
根据矢量变换原则,Clarke变换前后的磁场应该完全等效,即合成的磁势矢量分别在两个坐标系坐标轴上的投影应该相等。设磁动势是正弦分布的,当三相总磁动势与两相总磁动势相等时,两套绕组瞬时磁动势在两相坐标系上的投影都应相等。
因此根据图1-1可以得出磁势守恒的式子为:

将式(1.1)变形又可化为矩阵形式为:

因为式(1.2)中矩阵不是方阵不能求的逆矩阵,所以需要引入新变量零轴电流:

将式(1.3)和式(1.2)合并可以得到两相坐标系方程为:
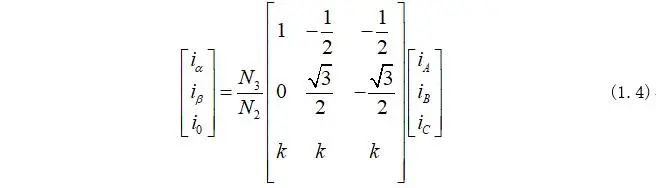
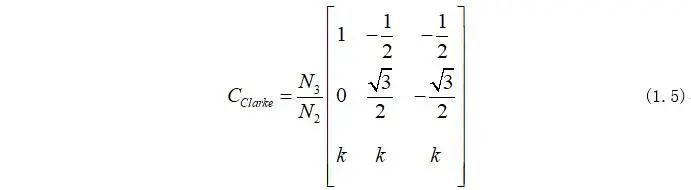
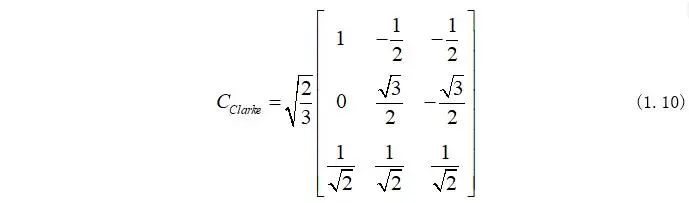
所以定义Clarke矩阵为:
Clarke最终表达形式
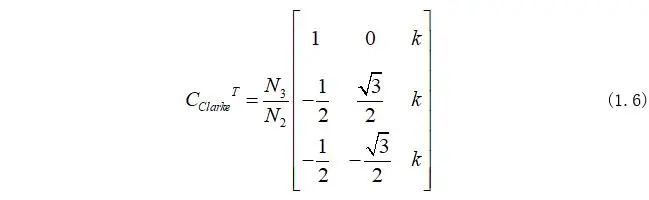
其中Clarke矩阵的转置矩阵为:
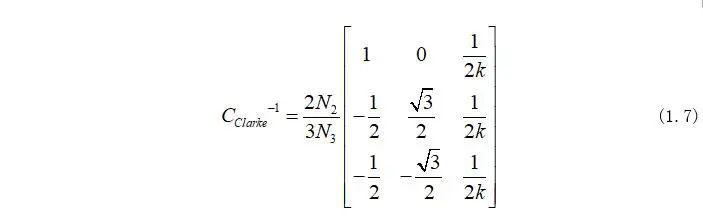
Clarke矩阵的逆矩阵为:
在Clarke变换下需要保证发电机的输出功率在变换前后不能发生变换,因此计算公式为:
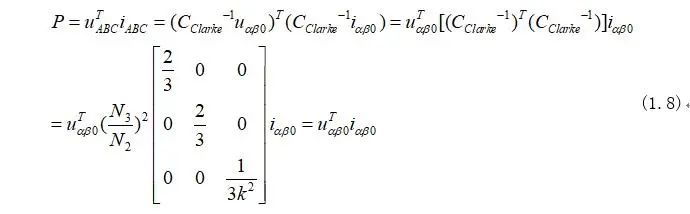
由式(1.8)可知,为了确保变换前后输出功率不变化,可以其中参数求得:

因此,Clarke变换式为:
如果忽略零轴变量,那么Clarke变换式又可化为:

Clarke如何应用
如何得到永磁同步电机在静止两相坐标的电机电压方程?
永磁同步电机的定子电压方程在三相静止坐标系下为:

将式(1.12)乘以Clarke矩阵可以得到永磁同步电机在两相静止坐标系下的电机电压方程为:

-
电动机
+关注
关注
74文章
4110浏览量
96250 -
坐标系
+关注
关注
0文章
29浏览量
7307 -
PMSM
+关注
关注
14文章
246浏览量
41874 -
坐标变换
+关注
关注
0文章
18浏览量
6883 -
CLARKE
+关注
关注
0文章
6浏览量
6724
发布评论请先 登录
相关推荐
MATLAB建立和控制图形窗口和坐标系命令
vision Assitant 建立坐标系(模板匹配)
labwindows/cvi中,请问如何在canvas控件上画一个扇形的极坐标系?
A、B、C三相坐标系中PMSM数学模型定子电压方程
PMSM的坐标系和数学模型
Pmsm在旋转坐标系的数学模型坐标变换
如何在PMSM中建立合适的坐标系(二)
自动驾驶各个坐标系

三坐标如何建立坐标系?

世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系

应用卫星通信领域的一个坐标转换过程—机体坐标系与ENU坐标系的转换






 工商网监
工商网监
评论