 VASS05机器人2.20系统ProConOS_IO生成文件使用的接口
VASS05机器人2.20系统ProConOS_IO生成文件使用的接口
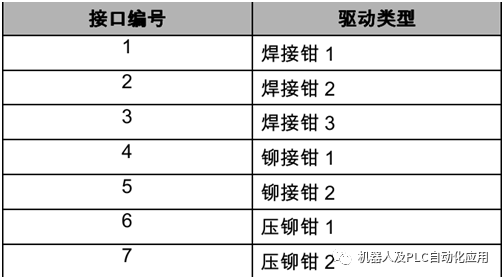
生成文件使用的接口:
2.选择激活ProConOS_IO,激活软件后开始进行寻找设备IO激活外部轴E1.
IO区域 焊钳1从705开始 焊钳2从865开始, 焊钳3从1025开始.
铆钳1 从1185开始, 铆钳2 从1265 开始. 压铆钳1从 1345开始
压铆钳2 从1425开始.
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28399浏览量
207004 -
IO接口
+关注
关注
0文章
31浏览量
13403
原文标题:VASS05机器人2.20系统ProConOS_IO接口解析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
什么是工业机器人
机械手之间有防护墙隔开,操作者可通过观察窗或闭路电视对从机械手操作机进行有效的监视,主从机械手系统的出现为机器人的产生为近代机器人的设计与制造作了铺垫。1954年美国戴沃尔最早提出了工业机器人
发表于 01-19 10:58
如何系统性地学习工业机器人威廉希尔官方网站 ?
`如何系统性地学习工业机器人威廉希尔官方网站
?对于一个还没入门的想学机器人的小白而言,想快速见到成效的的话,找一所对自己胃口的机器人培训机构是很关键的,当然自己本身的决心和毅力离也很重要。工业
发表于 03-06 12:56
机器人VS人:替代还是协作?
财经新闻 2016年,第一财经发布智能写稿机器人“DT稿王”在商业领域,刚刚过去的有着“广告界奥斯卡”之称的戛纳国际创意节上,阿里正式发布了一款可以根据商品自动生成文案,并且文案品质与人写文案已无二致
发表于 09-20 16:07
机器人系统是什么?
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及
发表于 09-10 10:44
服务机器人的视觉系统怎么设计?
随着计算机科学和自动控制威廉希尔官方网站
的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能机器人系统中一个重要的子
发表于 04-07 07:27
焊接机器人的结构与原理
、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作,实际示教与再现。焊接机器人结构:1、
发表于 11-16 16:18
机器人的控制系统
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本
发表于 09-13 08:40
ProConOS是一款高性能PLC运行时间引擎
KUKA.PLC ProConOS是一个运行时间系统,工艺程序包 KUKA.PLC Multiprog使用该系统执行机器人控制系统上的 虚拟
VASS05机器人2.20系统ProConOS_IO接口解析
ProConOS和机器人控制器之间的布尔值交换
$SOFTPLCBOOL[] ProConOS和机器人控制器之间的布尔值交换 借助Mulitprog库KrcExVarLib的功能块,可以从数组变量中读取单个或多个值,也可以将其写入数组变量






 工商网监
工商网监
评论