 CAN总线学习笔记|STM32的CAN环回测试
CAN总线学习笔记|STM32的CAN环回测试
CAN基础知识介绍文中介绍了CAN协议的基础知识,以及STM32F4芯片的CAN控制器相关知识,下面将通过实例,利用STM32CubeMX图形化配置工具,来实现CAN通讯的环回测试
1. STM32CubeMX配置
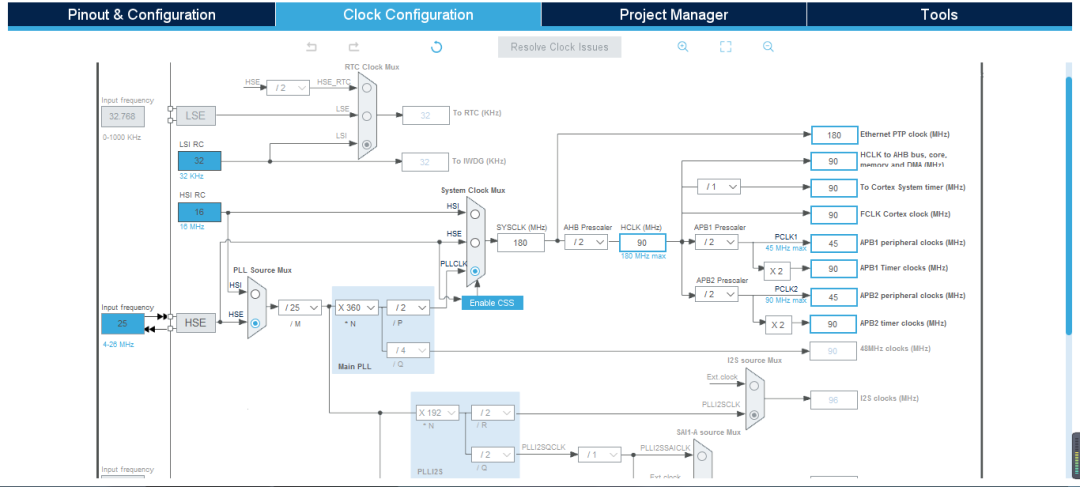
CAN是挂载在APB1总线上,设置PCLK1时钟频率到最大45MHz
激活CAN1,配置位时序参数,其他基本参数以及工作模式(此处设置为Loopback环回模式)
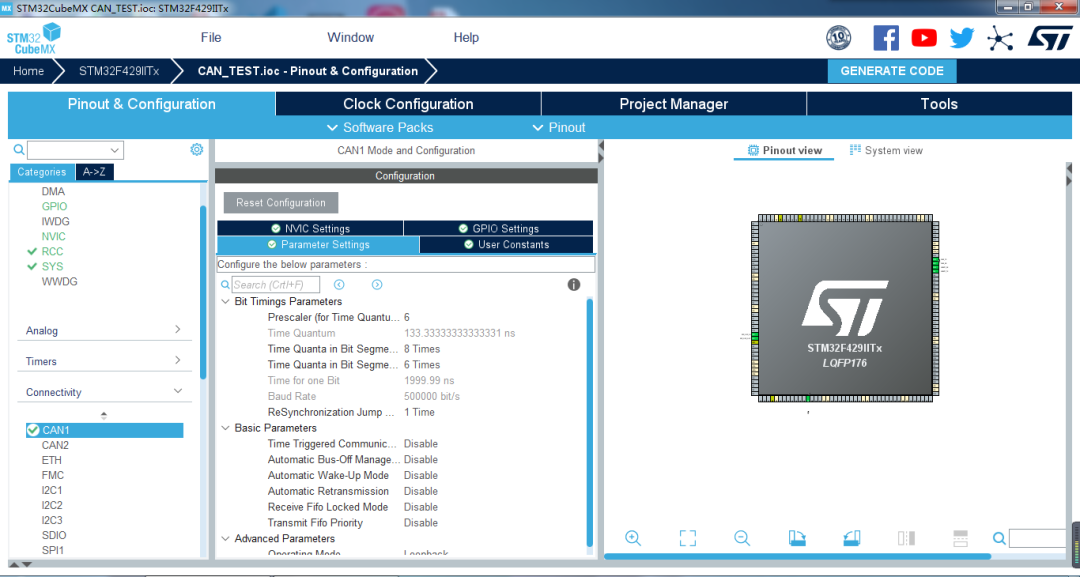
CAN波特率的计算公式:只需要知道BS1和BS2的设置,以及APB1的时钟频率,就可以方便的计算出波特率。比如设置TS1=8、TS2=6和BRP=6,在APB1频率为45Mhz的条件下,即可得到CAN通信的波特率=45000/6/(8+6+1)=500Kbps
激活USART1作为调试串口,配置相关LED对应的GPIO引脚作为指示灯
2.1 几个重要的结构体
主控寄存器 CAN_MCR:负责管理 CAN 的工作模式
typedefstruct
{
uint32_tPrescaler;/*配置CAN外设的时钟分频,可设置为1-1024*/
uint32_tMode;/*配置CAN的工作模式,回环或正常模式*/
uint32_tSyncJumpWidth;/*配置SJW极限值*/
uint32_tTimeSeg1;/*配置BS1段长度*/
uint32_tTimeSeg2;/*配置BS2段长度*/
FunctionalStateTimeTriggeredMode; /*是否使能TTCM时间触发功能*/
FunctionalStateAutoBusOff; /*是否使能ABOM自动离线管理功能*/
FunctionalStateAutoWakeUp; /*是否使能AWUM自动唤醒功能*/
FunctionalStateAutoRetransmission;/*是否使能NART自动重传功能*/
FunctionalStateReceiveFifoLocked;/*是否使能RFLM锁定FIFO功能*/
FunctionalStateTransmitFifoPriority;/*配置TXFP报文优先级的判定方法*/
}CAN_InitTypeDef;
发送及接收头结构体:主要用于构造发送报文,以及接收报文。收发发文时,需要自定义头结构体变量
typedefstruct
{
uint32_tStdId;/*存储报文的标准标识符11位,0-0x7FF.*/
uint32_tExtId;/*存储报文的扩展标识符29位,0-0x1FFFFFFF.*/
uint32_tIDE;/*存储IDE扩展标志*/
uint32_tRTR;/*存储RTR远程帧标志*/
uint32_tDLC;/*存储报文数据段的长度,0-8*/
FunctionalStateTransmitGlobalTime;
}CAN_TxHeaderTypeDef;
typedefstruct
{
uint32_tStdId;/*存储报文的标准标识符11位,0-0x7FF.*/
uint32_tExtId;/*存储报文的扩展标识符29位,0-0x1FFFFFFF.*/
uint32_tIDE;/*存储IDE扩展标志*/
uint32_tRTR;/*存储RTR远程帧标志*/
uint32_tDLC;/*存储报文数据段的长度,0-8*/
uint32_tTimestamp;
uint32_tFilterMatchIndex;
}CAN_RxHeaderTypeDef;
过滤器结构体:STM32CubeMX不会初始化过滤器的相关内容,需要自己添加
typedefstruct
{
uint32_tFilterIdHigh;/*CAN_FxR1寄存器的高16位*/
uint32_tFilterIdLow;/*CAN_FxR1寄存器的低16位*/
uint32_tFilterMaskIdHigh;/*CAN_FxR2寄存器的高16位*/
uint32_tFilterMaskIdLow;/*CAN_FxR2寄存器的低16位*/
uint32_tFilterFIFOAssignment;/*设置经过筛选后数据存储到哪个接收FIFO*/
uint32_tFilterBank;/*筛选器编号,范围0-27,CAN1是0-13,CAN2是14-27*/
uint32_tFilterMode;/*筛选器模式*/
uint32_tFilterScale;/*设置筛选器的尺度*/
uint32_tFilterActivation;/*是否使能本筛选器*/
uint32_tSlaveStartFilterBank;/*CAN2起始过滤器组*/
}CAN_FilterTypeDef;
2.2 程序编写
生成工程后,打开can.c文件,可见STM32CubeMX已经对位时序参数、其他基本参数以及工作模式进行了初始化。但是并没有初始化过滤器的相关内容,因此需要我们自己添加,并在CAN初始化时调用
//下面的设置只使能了FIFO0,并不过滤任何消息 voidCAN_Filter_Config(){ CAN_FilterTypeDefsFilterConfig; sFilterConfig.FilterBank=0;//筛选器编号,CAN1是0-13,CAN2是14-27 sFilterConfig.FilterMode=CAN_FILTERMODE_IDMASK;//采用掩码模式 sFilterConfig.FilterScale=CAN_FILTERSCALE_32BIT;//设置筛选器的尺度,采用32位 sFilterConfig.FilterIdHigh=0X0000;//过滤器ID高16位,即CAN_FxR1寄存器的高16位 sFilterConfig.FilterIdLow=0X0000;//过滤器ID低16位,即CAN_FxR1寄存器的低16位 sFilterConfig.FilterMaskIdHigh=0X0000;//过滤器掩码高16位,即CAN_FxR2寄存器的高16位 sFilterConfig.FilterMaskIdLow=0X0000;//过滤器掩码低16位,即CAN_FxR2寄存器的低16位 sFilterConfig.FilterFIFOAssignment=CAN_RX_FIFO0;//设置经过筛选后数据存储到哪个接收FIFO sFilterConfig.FilterActivation=ENABLE;//是否使能本筛选器 sFilterConfig.SlaveStartFilterBank=14;//指定为CAN1分配多少个滤波器组 if(HAL_CAN_ConfigFilter(&hcan1,&sFilterConfig)!=HAL_OK) { Error_Handler(); } }编写发送和接收数据函数:此处将格式固定为标准数据帧,ID为12
uint8_tCAN1_Send_Msg(uint8_t*msg,uint8_tlen){
uint16_ti=0;
uint32_ttxMailBox;
uint8_tsend_buf[8];
txHeader.StdId=12;
txHeader.ExtId=12;
txHeader.IDE=CAN_ID_STD;
txHeader.RTR=CAN_RTR_DATA;
txHeader.DLC=len;
for(i=0;i< len; i++)
send_buf[i] = msg[i];
if(HAL_CAN_AddTxMessage(&hcan1, &txHeader, send_buf, &txMailBox) != HAL_OK)
return 1;
return 0;
}
uint8_t CAN1_Recv_Msg(uint8_t *buf){
uint16_t i = 0;
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &rxHeader, buf);
if(rxHeader.IDE == CAN_ID_STD)
printf("StdId ID: %d
", rxHeader.StdId);
else
printf("ExtId ID: %d
", rxHeader.ExtId);
printf("CAN IDE: %d
", rxHeader.IDE);
printf("CAN RTR: %d
", rxHeader.RTR);
printf("CAN DLC: %d
", rxHeader.DLC);
printf("Recv Data: ");
for(i = 0; i < rxHeader.DLC; i++)
printf("%c",buf[i]);
printf("
");
return rxHeader.DLC;
}
默认Cubemx生成的代码并没有can start,没有调用HAL_CAN_Start(&hcan1) 来使能CAN,因此需要在CAN初始化代码中添加
voidMX_CAN1_Init(void){
......
/*USERCODEBEGINCAN1_Init2*/
CAN_Filter_Config();
HAL_CAN_Start(&hcan1);
/*USERCODEENDCAN1_Init2*/
}
主函数main.c中,代码如下
intmain(void){ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_CAN1_Init(); MX_USART1_UART_Init(); /*USERCODEBEGIN2*/ uint8_tret,i; printf("CANTesting....! "); uint8_ttxdata[8]={76,79,79,80,66,65,67,75}; uint8_trxdata[8]; /*USERCODEEND2*/ /*Infiniteloop*/ /*USERCODEBEGINWHILE*/ while(1) { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1); HAL_Delay(1000); printf("StartSenddata... "); ret=CAN1_Send_Msg(txdata,8); if(ret==0) printf("CANSendsuccess! "); else printf("CANSendfailed! "); CAN1_Recv_Msg(rxdata); printf("+++++++++++++++++++++++++++++++ "); /*USERCODEENDWHILE*/ /*USERCODEBEGIN3*/ } /*USERCODEEND3*/ }
3. 下载测试
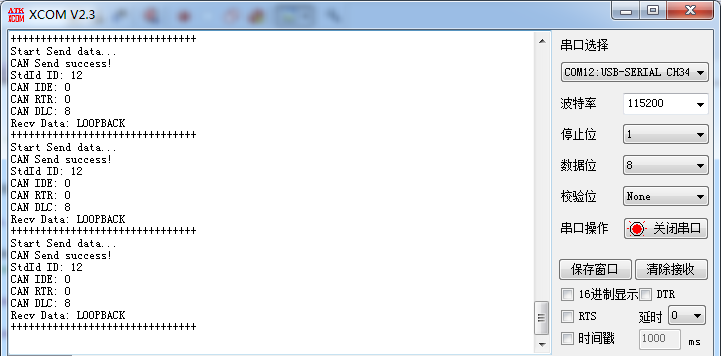
编译无误后下载到开发板,可以看到系统运行时D1指示灯不断闪烁,串口不断的打印CAN环回测试的数据
-
CAN总线
+关注
关注
145文章
1946浏览量
130726 -
CAN
+关注
关注
57文章
2744浏览量
463612 -
STM32
+关注
关注
2270文章
10895浏览量
355727 -
stm32cubemx
+关注
关注
5文章
283浏览量
14791
原文标题:CAN总线学习笔记 | STM32的CAN环回测试
文章出处:【微信号:嵌入式攻城狮,微信公众号:嵌入式攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐











 工商网监
工商网监
评论