 KUKA系统变量$INTERPRETER解释器
KUKA系统变量$INTERPRETER解释器
提交解释器的状态显示

机器人解释器的状态显示。可在此处重置或取消勾选程序。


选择了提交解释器。语句指针位于所选提交程序的首行。

已选择 SUB 程序并且正在运行。

提交解释器被停止。

选择了提交解释器。
$INTERPRETER 解释器系统变量
通过变量可以读取许多系统状态,并且在许多情况下也可以进行设置。严格来说,这些变量存在多次-每个解释器一次。对于所有解释器,它们的名称相同。
例子:
程序运行模式($PRO_MODE)
程序状态($PRO_STATE)
进程指针的数据($PRO_IP)
解释器当前正在等待的WAITFOR语句($ WAIT_FOR [])
当访问这样的变量时,它总是自动引用到当前解释器。这是由$ INTERPRETER定义的。
默认情况下,机械手控制器以“单提交”模式运行。这意味着有两个任务同时运行:
机器人解释器
运动程序在机器人解释器中运行。
系统提交解释器
程序SPS.SUB通过系统提交解释器运行。 SPS.SUB程序用于控制器内部的提交任务。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
变量
+关注
关注
0文章
613浏览量
28351 -
KUKA
+关注
关注
3文章
217浏览量
16508 -
解释器
+关注
关注
0文章
103浏览量
6508
原文标题:KUKA 系统变量$INTERPRETER解释器
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
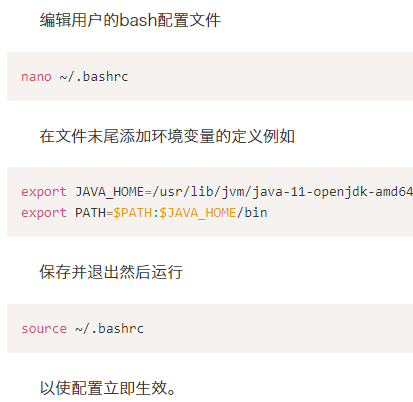
Linux环境变量配置方法
Linux上环境变量配置分为设置永久变量和临时变量两种。环境变量设置方法同时要考虑环境Shell类型,不同类型的SHELL设置临时变量方法和

实践GoF的23种设计模式:解释器模式
解释器模式(Interpreter Pattern)应该是 GoF 的 23 种设计模式中使用频率最少的一种了,它的应用场景较为局限。

C语言变量应用详解
变量其实只不过是程序可操作的存储区的名称。C 中每个变量都有特定的类型,类型决定了变量存储的大小和布局,该范围内的值都可以存储在内存中,运算符可应用于变量上。
发表于 03-18 11:18
•370次阅读

Linux系统中设置环境变量的方法和技巧
在Linux中环境变量是一种保存有关系统环境配置的信息的对象。它们被广泛用于存储有关系统操作的信息比如路径、文件名等。通过合理配置环境变量我们可以方便地访问和执行各种命令和程序。
自动控制系统中的操纵变量指什么
自动控制系统中的操纵变量指的是在系统中由控制器控制的可调节参数,用于调节或改变被控对象的输出或状态。操纵变量是自动控制中非常重要的概念,它是
C语言:指针中内存是如何存放变量
在程序中定义一个变量,那么在程序编译的过程中,系统会根据你定义变量的类型来分配「相应尺寸」的内存空间。那么如果要使用这个变量,只需要用变量名
发表于 01-08 10:14
•441次阅读
如何使用GPT监控变量
在项目调试过程中,需要监控变量通常采用ICS(In Circuit Scope)和DA两种方法。使用ICS会占用MCU的资源(UART)以及增加硬件的成本(ICS硬件板);如果MCU的DA引脚已被
stm32变量能存进flash中吗
当涉及到将变量存储在Flash中时,我们通常指的是将变量存储在STM32微控制器的闪存器件中。在STM32芯片中,闪存用于存储程序代码和只读数据,但对于一些应用情况,我们可以使用闪存来存储可读
ros怎么设置环境变量
设置ROS环境变量是使用ROS的重要步骤之一。本文将详细介绍如何设置ROS环境变量,包括什么是环境变量、为什么要设置ROS环境变量、如何设置ROS环境
KUKA系统变量$err说明
该变量可用于评估相对于提前运行的当前执行程序。例如,该变量可用于评估程序中的错误,以便能够使用适当的故障服务功能对其进行响应。
python环境变量的配置pip
开始,然后讨论如何找到Python的安装路径以及如何配置环境变量。接下来,我们将详细讲解pip的用途和安装方法,并解决一些与pip相关的常见问题。 一、环境变量的概念 环境变量是操作系统





 工商网监
工商网监
评论