 增量型编码器与绝对型编码器区别
增量型编码器与绝对型编码器区别
一、编码器的分类
根据检测原理,编码器可分为光学式、磁式、感应式和电容式,根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
1.1 增量式编码器
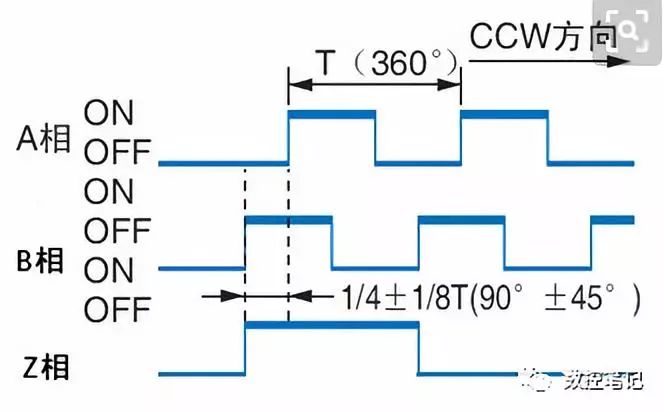
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90。从而可方便的判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。一般如果不用断电后仍要记录位置的场合都可以用增量型编码器,增量型编码器可以接入到到高数计数功能的PLC,也可以接到常用的计数器轴的每转动一周,增量型编码器提供一定数量的脉冲。
周期性的测量或者单位时间内的脉冲计数可以用来测量移动的速度。
如果在一个参考点后面脉冲数被累加,计算值就代表了转动角度或行程的参数。双通道编码器输出脉冲A、B之间相差为90度,能使接收脉冲的电子设备接收轴的旋转感应信号,因此可用来实现双向的定位控制;另外,三通道增量型旋转编码器每一圈产生一个称之为零位信号的脉冲(Z)。
1.2 绝对式编码器
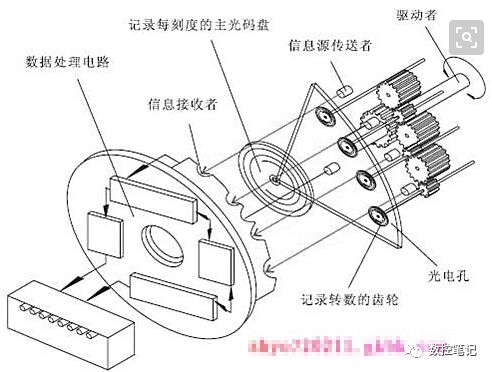
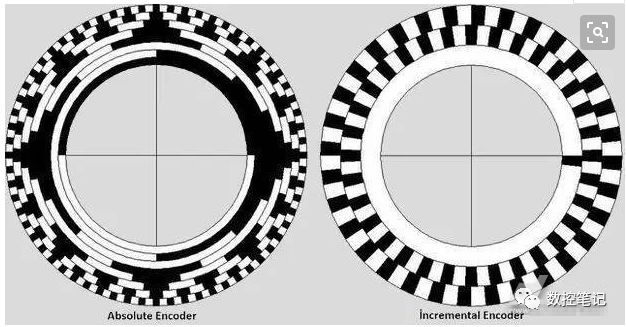
绝对式编码器是直接输出数字的传感器,在它的圆形码盘上沿径向有若干同心码盘,每条道上有透光和不透光的扇形区相间组成,相邻码道的扇区树木是双倍关系,码盘上的码道数是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件,当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码。显然,码道必须N条码道。目前国内已有16位的绝对编码器产品。绝对式编码器输出的是二进制码或格雷码等,即使是断电后也能记录下当前的位置;
绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16 线……编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。
两者各有优缺点,增量型编码器比较通用,大多场合都用这种。从价格看,一般来说绝对型编码器要贵得多,而且绝对型编码器有量程范围,所以一般在特殊需要的机床上应用较多。
绝对值编码器为每一个轴的位置提供一个独一无二的编码数字值。特别是在定位控制应用中,绝对值编码器减轻了电子接收设备的计算任务,从而省去了复杂的和昂贵的输入装置;而且,当机器合上电源或电源故障后再接通电源,不需要回到位置参考点,就可利用当前的位置值。
1.3 混合式绝对编码器
混合式绝对编码器,它输出两组信息,一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
二、光电编码器的应用 增量型编码器与绝对型编码器区别
1、角度测量
汽车驾驶interwetten与威廉的赔率体系 器,对方向盘旋转角度的测量选用光电编码器作为传感器。重力测量仪,采用光电编码器,把他的转轴与重力测量仪中补偿旋钮轴相连,扭转角度仪,利用编码器测量扭转角度变化,如扭转实验机、渔竿扭转钓性测试等。摆锤冲击实验机,利用编码器计算冲击是摆角变化。
2、长度测量
计 米 器,利用滚轮周长来测量物体的长度和距离。
拉线位移传感器,利用收卷轮周长计量物体长度距离。
联轴直测,与驱动直线位移的动力装置的主轴联轴,通过输出脉冲数计量。
介质检测,在直齿条、转动链条的链轮、同步带轮等来传递直线位移信息。
3、速度测量
线速度,通过跟仪表连接,测量生产线的线速度
角速度,通过编码器测量电机、转轴等的速度测量
4、位置测量
机床方面,记忆机床各个坐标点的坐标位置,如钻床等
自动化控制方面,控制在牧歌位置进行指定动作。如电梯、提升机等
5、同步控制
通过角速度或线速度,对传动环节进行同步控制,以达到张力控制
三、增量型编码器(旋转型)
1、工作原理:
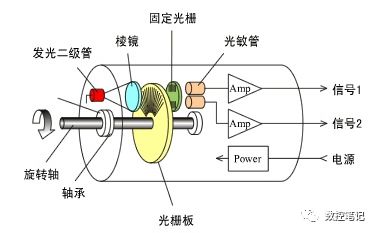
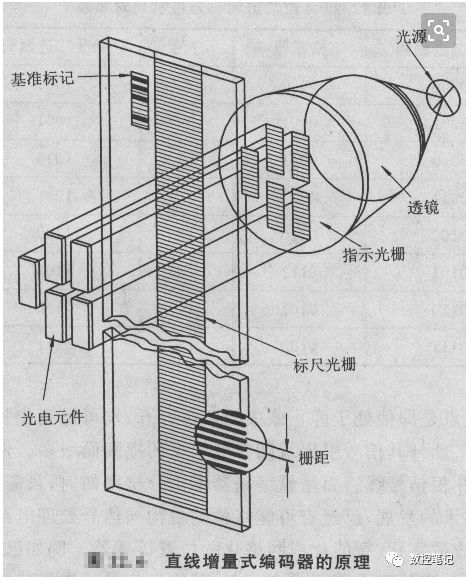
由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
2、信号输出:
信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。
如单相联接,用于单方向计数,单方向测速。
A.B两相联接,用于正反向计数、判断正反向和测速。
A、B、Z三相联接,用于带参考位修正的位置测量。
A、A-,B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。
对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。
对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
3、增量式编码器的问题:
增量型编码器存在零点累计误差,抗干扰较差,接收设备的停机需断电记忆,开机应找零或参考位等问题,这些问题如选用绝对型编码器可以解决。
增量型编码器的一般应用:
测速,测转动方向,测移动角度、距离(相对)。
四、绝对型编码器(旋转型)
绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16 线......编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。
从单圈绝对值编码器到多圈绝对值编码器
旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360度以内的测量,称为单圈绝对值编码器。
如果要测量旋转超过360度范围,就要用到多圈绝对值编码器。
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多, 这样在安装时不必要费劲找零点, 将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。
增量型编码器和绝对值编码器的区别主要有以下几点:
1:首先绝对值编码器的码盘和增量型编码器的码盘存在差异,增量型编码器的码盘是在同一个圆周上有固定数量的光栅,通过光栅切割光线产生一定数量的脉冲(每圈上光栅的数量即为编码器所谓的分辨率);而绝对值编码器则在同样的码盘上在不同的圆周上有不同数量,不同间隔的光栅,即当码盘停在某个位置时,可以通过码盘上各圆周上的是否透光组合成固定的位置,经过输出线后显示的是一个固定的数字。
2:当断电后增量型编码器无法记录当前的位置,只能配合计数器等设备记录。而绝对值编码器本身可以记录位置,无用担心断电后的记录保存问题。
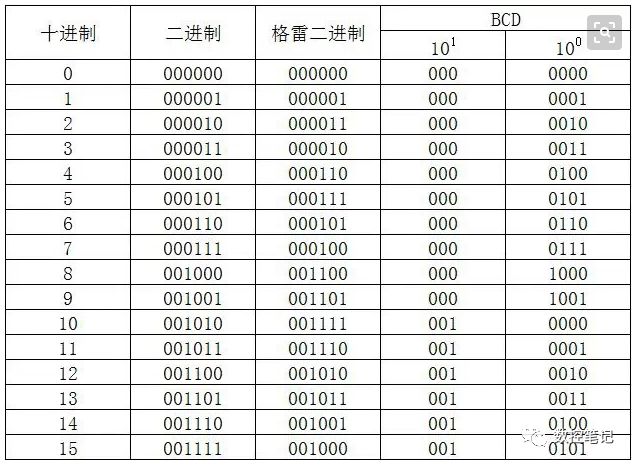
3:绝对值编码器具有多种输出码制(二进制码、十进制BCD码、格雷码),可以直接提供给显示单元、PC等设备,而增量型编码器则无法直接提供给显示单元。
4:绝对值编码器几乎可以不考虑速度、干扰等问题,只要编码器停止在某个位置,不论转动中收到什么影响,最后终能显示当前的位置。
审核编辑:汤梓红
-
编码器
+关注
关注
45文章
3639浏览量
134435 -
plc
+关注
关注
5010文章
13275浏览量
463090 -
增量型编码器
+关注
关注
0文章
5浏览量
6012
原文标题:对比 | 增量型编码器与绝对型编码器区别
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
绝对值编码器和增量编码器的区别
增量型编码器与绝对型编码器区别
虹科干货|绝对式编码器和增量式编码器的区别


增量型编码器和绝对值编码器控制位置一样吗







 工商网监
工商网监
评论