 【产品应用】用 AWTK 和 AWPLC 快速开发嵌入式应用程序 (10)- 简易跑步机
【产品应用】用 AWTK 和 AWPLC 快速开发嵌入式应用程序 (10)- 简易跑步机
 背景
背景AWTK全称 Toolkit AnyWhere,是 ZLG 开发的开源 GUI 引擎,旨在为嵌入式系统、WEB、各种小程序、手机和 PC 打造的通用 GUI 引擎,为用户提供一个功能强大、高效可靠、简单易用、可轻松做出炫酷效果的 GUI 引擎。
简介
运动控制是 PLC 重要的应用领域,本文以一个简化版的跑步机为例,介绍一下在 AWPLC 中,使用运动控制块的基本方法。
对于单轴运动控制,从控制的方法来说,可以分为 3 类:
位置控制。让轴转动指定的位置;
速度控制。让轴以指定的速度转动;
力矩控制。让轴以指定的力矩转动。
在 PLCOpen 的运动控制功能块中,对以上控制方法都有支持。跑步机是一个典型的速度控制类应用,常见速度类控制应用也很多,比如抽油烟机、洗衣机、扶手电梯和传送带等。速度控制是最简单的控制方式,使用 MC_MoveVelocity 这个功能块就可以了,它让轴以指定的速度转动,其图形表示如下:

*这是一个标准的功能块,具体用法可以参考 PLCOpen 的文档,网上也有很多文章介绍。
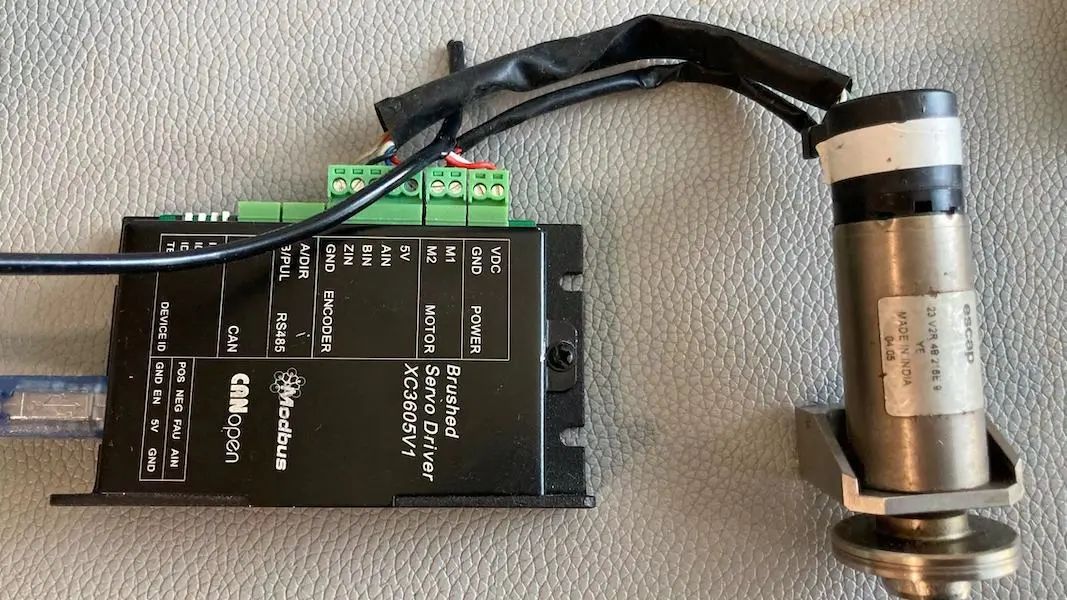
6 个按钮。 ● 启动按钮。 ●停止按钮。 ●增加速度按钮。 ●减小速度按钮。 ●1 档按钮。 ●2 档按钮。 数码管。用来显示当前的速度。 伺服电机。因为没有真实硬件,找了一个二手伺服电机,看起来比较 Low,反正能转起来吧,下一步会支持 ZLG 专业的运动控制器。运动控制算法用的一个开源的库(实现不太完整),以后会集成 ZLG 算法专家提供的运动控制库(也可以集成第三方商业运动控制算法)。
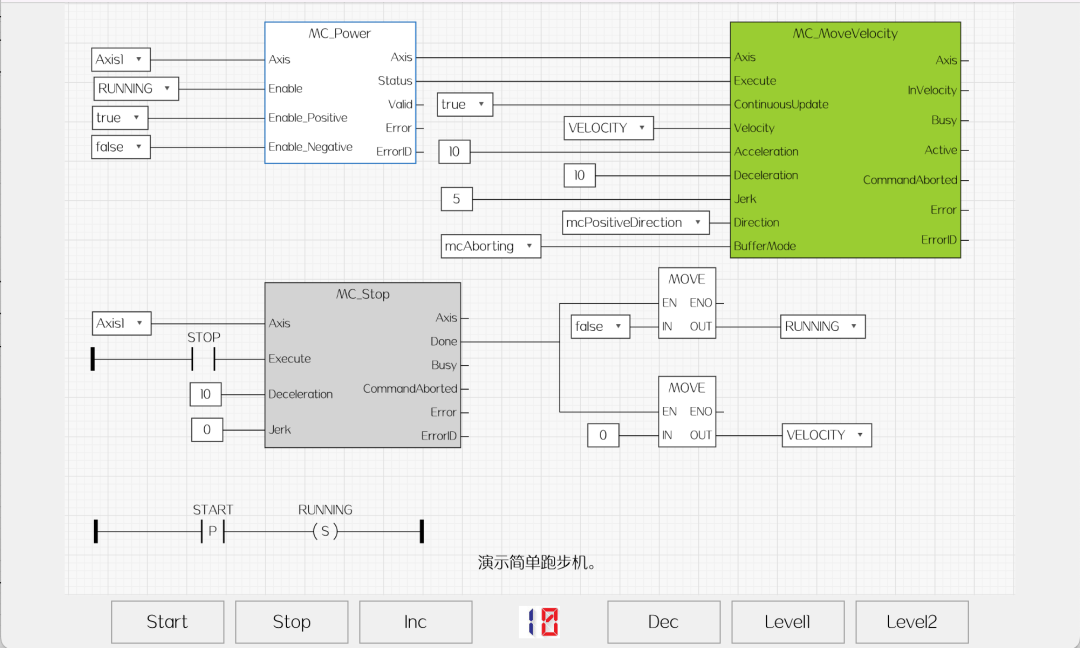
程序界面如下所示(为了方便理解,我们把功能块图也放到了界面上):
2. 软件interwetten与威廉的赔率体系
按钮和数码管都用软件模拟。
PLC程序
运动控制的功能块,参数通常比较多,占地比较大,一个屏幕放不下几个。在这个例子中,我们把它放到两个程序中:
主程序程序负责运动控制和开关机。
速度调节和档位切换。
* 注意:实际速度与硬件选型有关,需要对电机控制器的参数进行配置,这里为了简化,把速度设置到0-100之间。

点击 START 按钮。将状态 RUNNING 设置为 TRUE。 RUNNING 为 TRUE 会激活功能块 MC_Power 启动电机。 电机启动完成,MC_Power 的 Status 输出 TRUE,MC_MoveVelocity 开始执行,设置初始速度。
关机过程:
点击 STOP 按钮,MC_Stop 开始执行。 停机完成,MC_Stop 的 Done 输出 TRUE,此时将状态 RUNNING 设置为 FALSE,并将速度清零。
注意事项:
MC_Power 的参数 Enable_Negative 设置为 false,禁止反转。
MC_MoveVelocity 的 ContinouseUpdate 设置为 true,否则速度调节无效。

增加速度:
点击 INC 按钮。将速度增加 5,如果速度大于 100,取 100,设置到速度变量 VELOCITY。
减小速度:
点击 DEC 按钮。将速度减小 5,如果速度小于0,取0,设置到速度变量 VELOCITY。
切换到 1 档:
将 40设置到速度变量 VELOCITY。
切换到 2 档:
将 80设置到速度变量 VELOCITY。
用户界面
应用程序不需要编程,用 AWTK Designer 设计好界面,将控件与模型进行绑定即可。下面介绍一下控件与模型的绑定方法。这里用的是 AWTK-MVVM,数据绑定规则与 AWTK-MVVM 是完全一样的。
模型可以用 io、plc 或者 io+plc。io 可以用来绑定 IO 变量,plc 可以用来绑定程序 PLC 内部变量。
示例:
由于符号%在程序里具有特殊功能,所以在绑定 IO 变量时,把%换成_。比如:将%QX0.0写作_QX0.0。
*由此可见,在 AWPLC 功能块图的帮助下,我们不要写 C 代码或脚本,即可完成应用程序的开发。AWPLC 用低代码降低了开发的门槛,提高了开发的效率。AWPLC 等您来玩!
【版权声明】本文为ZLG开发者社区用户原创内容,未经授权不得转载。欢迎更多用户到社区交流互动、创作博文,一经采用,可获得百元京东E卡。









-
致远电子
+关注
关注
13文章
406浏览量
31308
原文标题:【产品应用】用 AWTK 和 AWPLC 快速开发嵌入式应用程序 (10)- 简易跑步机
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AWTK-WEB 快速入门(2) - JS 应用程序

霍尔传感器的应用——跑步机

霍尔元件DH220在跑步机中的应用
AWTK-WEB 快速入门(1) - C 语言应用程序
【AWTK使用经验】如何使用系统输入法与开启最大化窗口功能
霍尔开关给跑步机带来精准感应
跑步机的心声——N8900蓝牙音频芯片赋予智能健身新维度

EsDA,一站式嵌入式软件
七大嵌入式GUI盘点
【AWTK最新动态】AWTK 1.8版本发布
大小鼠也需要跑步机——ZL-013小动物实验跑步机
深度详解嵌入式系统专用轻量级框架设计

【插针机HMI开发】用AWTK开发人机界面
【从0开始创建AWTK应用程序】编译应用到RTOS平台





 工商网监
工商网监
评论