 三维点云配准过程及点集到点集ICP配准的算法研究
三维点云配准过程及点集到点集ICP配准的算法研究
1、点云配准过程
就是求一个两个点云之间的旋转平移矩阵(rigid transform or euclidean transform 刚性变换或欧式变换),将源点云(source cloud)变换到目标点云(target cloud)相同的坐标系下。
可以表示为以下的方程:

其中
 就是target cloud与source cloud中的一对对应点。
就是target cloud与source cloud中的一对对应点。
而我们要求的就是其中的R与T旋转平移矩阵。
这里,我们并不知道两个点集中点的对应关系。这也就是配准的核心问题。
2、配准分为粗配准与精配准两步
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的情况下,找到一个这两个点云近似的旋转平移矩阵(不一定很精确,但是已经大概是对的了)。
精配准就是在已知一个旋转平移的初值的情况下(这个初值大概已经是正确的了),进一步计算得到更加精确的旋转平移矩阵。
这里从精配准开始讲起。
精配准的模式基本上已经固定为使用ICP算法及其各种变种。ICP算法由Besl and McKay 1992, Method for registration of 3-D shapes文章提出。
文中提到的算法不仅仅考虑了点集与点集之间的配准,还有点集到模型、模型到模型的配准等。
简要介绍一下点集到点集ICP配准的算法:
1) ICP算法核心是最小化一个目标函数:

(这里的表述与原文略微有些不同,原文是用四元数加上一个偏移向量来表达旋转平移变换。) 就是一对对应点,总共有
就是一对对应点,总共有 对对应点。这个目标函数实际上就是所有对应点之间的欧式距离的平方和。
对对应点。这个目标函数实际上就是所有对应点之间的欧式距离的平方和。
2) 寻找对应点
可是,我们现在并不知道有哪些对应点。因此,我们在有初值的情况下,假设用初始的旋转平移矩阵对source cloud进行变换,得到的一个变换后的点云。
然后将这个变换后的点云与target cloud进行比较,只要两个点云中存在距离小于一定阈值(这就是题主所说的ICP中的一个参数),我们就认为这两个点就是对应点。这也是“最邻近点”这个说法的来源。
3) R、T优化
有了对应点之后,我们就可以用对应点对旋转R与平移T进行估计。这里R和T中只有6个自由度,而我们的对应点数量是庞大的(存在多余观测值)。因此,我们可以采用最小二乘等方法求解最优的旋转平移矩阵。一个数值优化问题,这里就不详细讲了。
4) 迭代
我们优化得到了一个新的R与T,导致了一些点转换后的位置发生变化,一些最邻近点对也相应的发生了变化。
因此,我们又回到了步骤2)中的寻找最邻近点方法。2)3)步骤不停迭代进行,直到满足一些迭代终止条件,如R、T的变化量小于一定值,或者上述目标函数的变化小于一定值,或者邻近点对不再变化等。(这里也是题主所说的ICP算法中的一个参数)
算法大致流程就是上面这样。这里的优化过程是一个贪心的策略。首先固定R跟T利用最邻近算法找到最优的点对,然后固定最优的点对来优化R和T,依次反复迭代进行。
这两个步骤都使得目标函数值下降,所以ICP算法总是收敛的,这也就是原文中收敛性的证明过程。这种优化思想与K均值聚类的优化思想非常相似,固定类中心优化每个点的类别,固定每个点的类别优化类中心。
关于参数的选择:
ICP算法的参数主要有两个。一个是ICP的邻近距离,另外一个是迭代的终止条件。这些参数的选择,与实际的工程应用相关。比如说你的仪器精度是5mm,那么小于5mm是可以认为是对应点,而最终的迭代终止条件也就是匹配点之间平均距离小于5mm。
而且这些参数可以由算法逐步迭代减小,最初使用较大的对应点距离参数,然后逐步减小到一个较小的值。(问过师兄才知道实际过程这样操作会比较合适。)需要手动调整一些参数。(这跟机器学习调参比起来,简直不是事~)
3、粗配准
前面介绍到了,ICP算法的基本原理。它需要一个旋转平移矩阵的初值。这个初值如果不太正确,那么由于它的greedy优化的策略,会使其目标函数下降到某一个局部最优点(当然也是一个错误的旋转平移矩阵)。因此,我们需要找到一个比较准确的初值,这也就是粗配准需要做的。
粗配准目前来说还是一个难点。针对于不同的数据,有许多不同的方法被提出。
我们先介绍配准的评价标准,再在这个标准下提出一些搜索策略。
评价标准:比较通用的一个是LCP(Largetst Common Pointset)。给定两个点集P,Q,找到一个变换T(P),使得变换后的P与Q的重叠度最大。在变换后的P内任意一点,如果在容差范围内有另外一个Q的点,则认为该点是重合点。重合点占所有点数量的比例就是重叠度。
解决上述LCP问题,最简单粗暴的方法就是遍历。假设点集P,Q的大小分别为m,n。而找到一个刚体变换需要3对对应点。
那么brute force 搜索的需要 的复杂度。对于动辄几百万个点的点云,这种时间复杂度是不可接受的。
的复杂度。对于动辄几百万个点的点云,这种时间复杂度是不可接受的。
因此,许多搜索策略被提出。比较容易想到的是RANSAC之类的搜索方法。而对于不同的场景特点,可以利用需配准点云的特定信息加快搜索。(例如知道点云是由特定形状的面构成的)这里先介绍一个适用于各种点云,不需要先验信息的搜索策略,称为4PC(4 Point Congruent)。
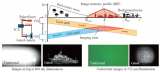
搜索策略:4PC搜索策略是在P,Q中找到四个共面的对应点。
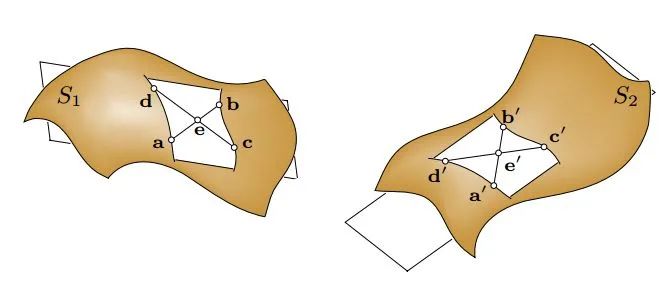
如上图所示(来自4PC原文),这四个共面的点相交于e。这里有两个比例在刚体变化下是不变的。(实际上在仿射变换下也是不变的) 

而4PC将对于三个点的搜索转换为对e,e‘的搜索,从而将复杂度降低到了 。
。
这四个点的距离越远,计算得到的转换越稳健。但是这里的四个点的搜索依赖于两个点云的重叠度。
具体的算法可以参考4-Points Congruent Sets for Robust Pairwise Surface Registration的原文。
4PC算法通用性较好,但是对于重叠度较小、或是噪声较大的数据也会出现配准错误或是运行时间过长的问题。针对于不同的场景很多其他的搜索策略也被提出。
这里安利一下我师兄的论文吧~Automatic registration of large-scale urban scene point clouds based on semantic feature points
我们课题组主要是研究室外地面站LiDAR获取的点云配准问题。这种情形下,由于扫描仪内有自动安平装置,Z轴都是竖直方向(重力方向),刚体变换只存在三维平移与平面(XoY面上的)旋转。我们就在场景中搜索竖直的特征线并且得到它们与地面的交点。
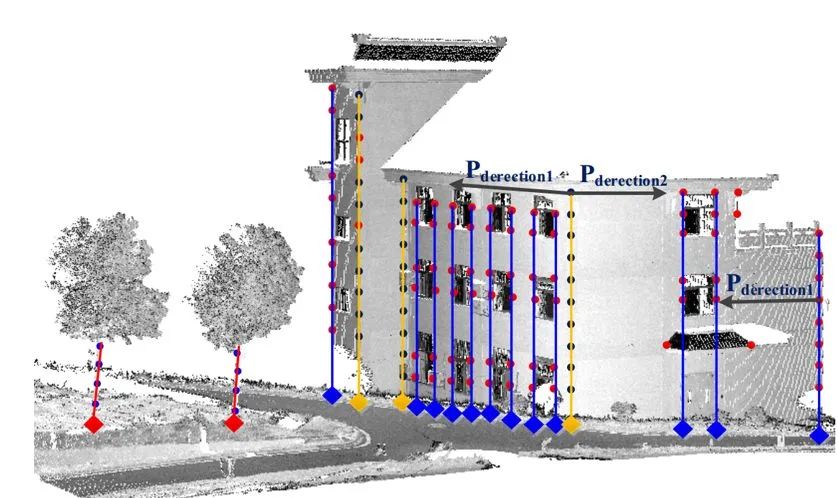
再将这些交点构建出三角形,以三角形的全等关系来得到匹配。
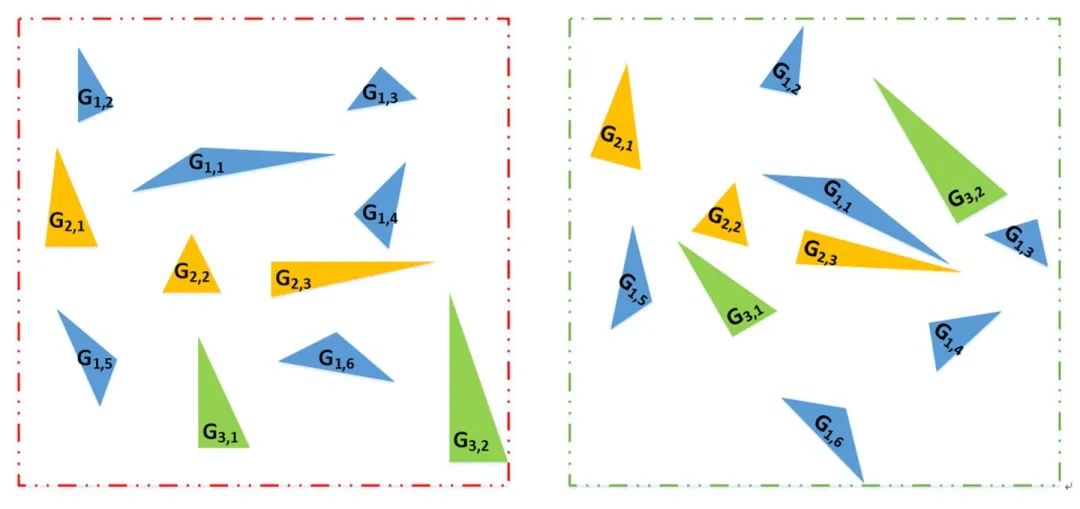
找出其中一致性最好的三角形集合,作为匹配的集合,进行粗配准。
这种方法适用于竖直线较多的场景,比如城区的建筑物的边线、林区树木的树干等。设计的方法还是很巧妙的。当然如果场景内这种特征较少,就比较难以配准。
审核编辑:郭婷
-
函数
+关注
关注
3文章
4329浏览量
62578 -
ICP
+关注
关注
0文章
70浏览量
12778
原文标题:一文详解三维点云配准过程
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于深度学习的三维点云分类方法

什么是三维点云分割
配网行波故障定位装置的研究过程
友思特方案 基于三维点云实现PCB装配螺丝视觉检测

泰来三维 三维扫描古建筑-苏巴什佛寺遗址数字化保护
友思特案例 | 自研创新!三维工件尺寸测量及点云处理解决方案

泰来三维|数字化工厂_煤矿三维扫描数字化解决方案

激光距离选通三维成像威廉希尔官方网站 研究进展综述
泰来三维|三维扫描服务_三维激光扫描仪测量山体滑坡点云建模
泰来三维|三维扫描服务_三维扫描助力园区改造公园

泰来三维|三维扫描点云数据怎么处理如何建模
基于深度学习的方法在处理3D点云进行缺陷分类应用

移动协作机器人的RGB-D感知的端到端处理方案






 工商网监
工商网监
评论