 高密度集成微惯性导航自主完好性监测算法
高密度集成微惯性导航自主完好性监测算法
高密度集成微惯性导航系统在微小型导弹武器系统、下一代巡航弹、芯片卫星、微小型飞行器、航空弹射座椅及智能头盔、单兵装备等领域具有广阔的应用前景,成为各种制导武器及武器平台必备的关键单机产品。高密度集成微惯性导航中卫导与惯导信息融合解算涉及到惯导系统IMU陀螺仪和加速度计测量值处理、测量误差估计、姿态、速度和位置更新以及卫星导航系统信息解算过程中的导航电文提取、可见卫星空间位置速度计算、伪距率提取以及组合导航扩展卡尔曼滤波主滤波器设计、量测方程设计、过程噪声和量测噪声矩阵估计等内容。然而微惯性导航系统完好性监测算法中多差错和小差错故障信息检测较为困难,甚至遇到“完好性黑洞”等特殊情形,因此,针对高密度集成微惯性导航系统进行自主完好性监测威廉希尔官方网站 研究具有重要意义。
据麦姆斯咨询报道,近期,北京航天控制仪器研究所、中国航天科技集团有限公司的研究人员针对多平台、小型化、集群化等未来微小型空天飞行器故障信息自主监测等威廉希尔官方网站 需求,提出一种高密度集成微惯性导航自主完好性监测算法——快速最优子集甄选完好性监测算法(Fast Optimal Subset Selection Integrity Monitoring,FOIM)。该算法能够显著降低系统的计算复杂度,并可有效检测小差错和多差错故障观测量,具有较高的故障信息源检测识别概率,增强了高密度集成微惯性导航与制导系统鲁棒性和完备性。相关研究成果已发表于《中国空间科学威廉希尔官方网站 》期刊。
该项工作中,研究人员将传感、处理、通信等功能器组件进行系统级微尺度集成,按照物理功能及其实现方式对传统惯性微系统进行优化组合,以高性能低功耗处理器为核心,将微惯性导航系统的传感器、存储器、通信模块等有机地整合一体,构建出一种开放式、通用化、高密度的微惯性导航系统。该高密度集成微惯性导航系统通过测量运动载体相对惯性空间的角运动和线运动,经过积分等运算可实时得到载体的姿态、速度、位置信息,同时结合多模卫星导航系统进行松组合导航及惯导误差在线修正,不仅可以建立运载体的运动基准坐标系,还可精确地测量运载体的给类运动参数,同时具有安全自主、高度隐蔽、信息实时与连续、不受时间与地域限制等重要特性。
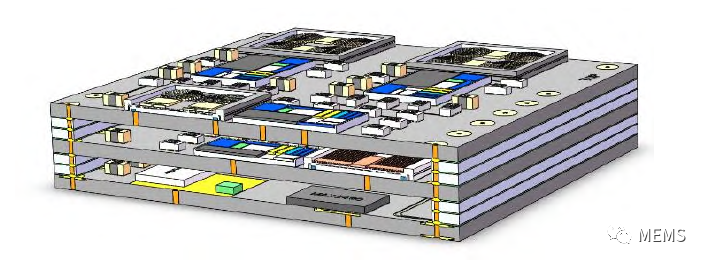
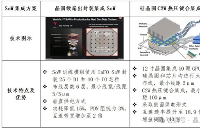
高密度集成微惯性导航系统机械结构图
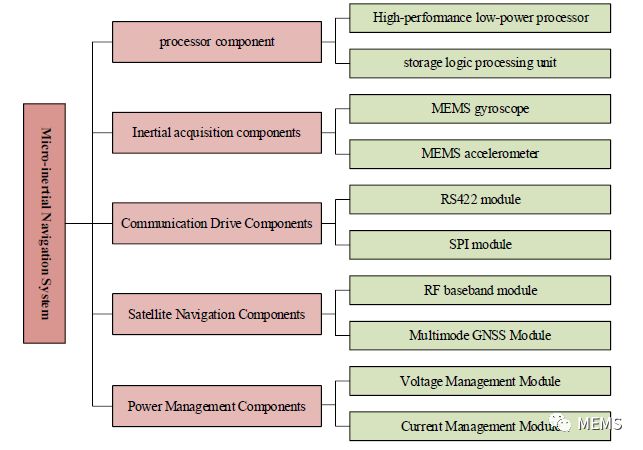
高密度集成微惯性导航系统组成框图
针对高密度集成微惯性导航中多差错和小差错故障信息监测等自主完好性问题,研究人员提出了一种FOIM算法。该算法通过分析微惯性导航卫星导航中可能出现的故障信息源,通过优选子集数目进行算法预检验甄选,排除可见导航卫星空间几何分布较差以及对完好性监测意义不大的组合,最终达到故障检测与排除的目的。与传统MHSS算法相比,该算法能够显著降低系统的计算复杂度,同时具有较高的故障信息源检测识别概率,有效避免了完好性黑洞等问题,提高了微惯性导航系统鲁棒性和完备性。
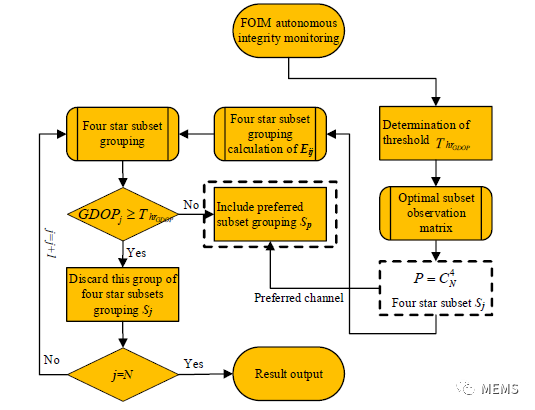
FOIM算法原理框图
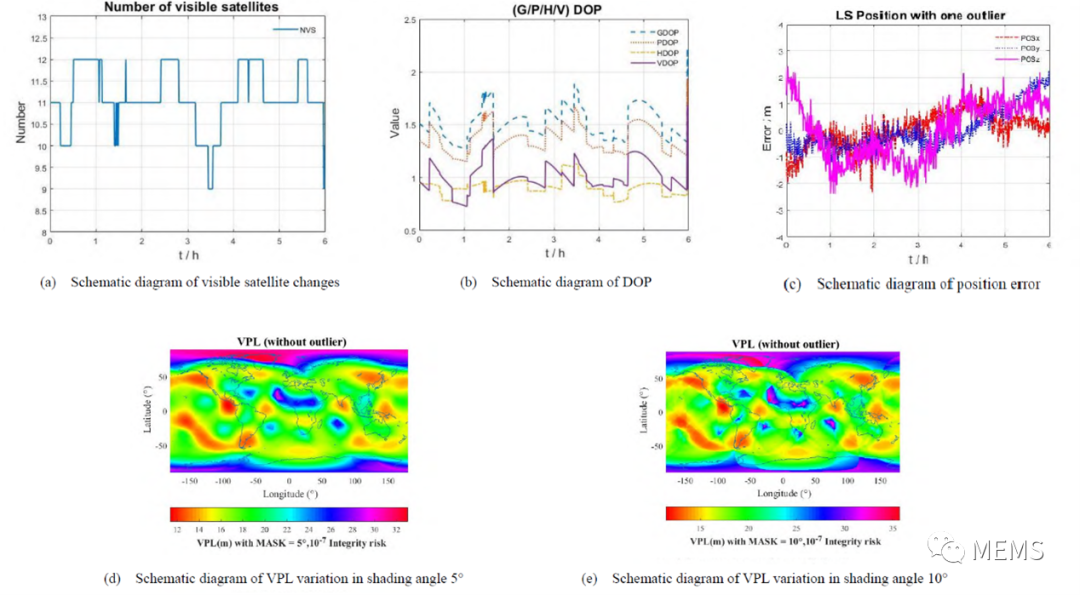
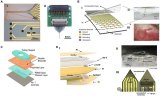
运动场景下微惯性导航终端性能示意图
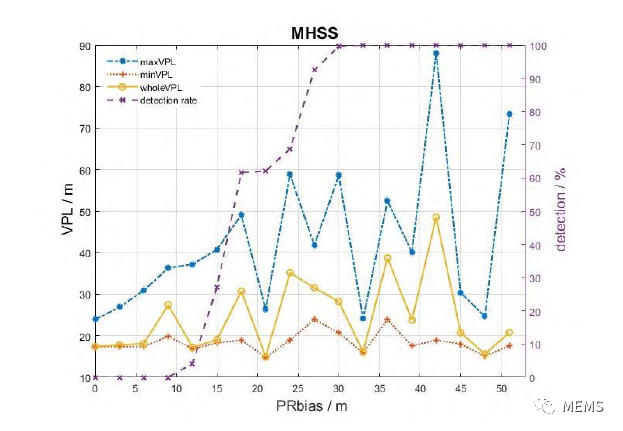
MHSS算法故障检测示意图
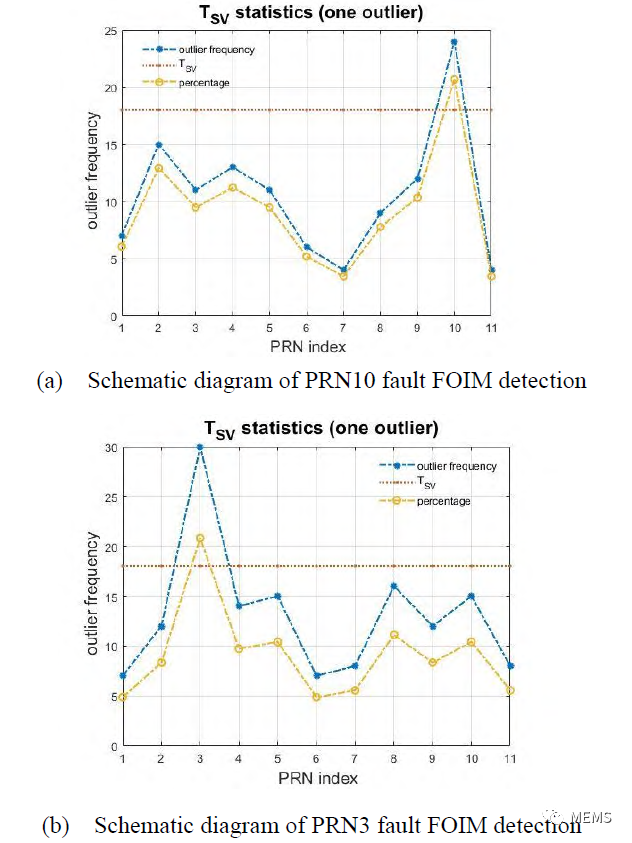
量测误差下FOIM算法故障检测示意图
随着MEMS及微惯性导航威廉希尔官方网站 的发展,小型化、低功耗、高性能的导航、制导与控制系统将越来越多地应用于微小型空天飞行器、无人作战系统以及精确制导弹药等领域。展望未来,高密度集成微惯性导航系统将会进一步综合应用所有可用传感器观测信息,如何更好地满足用户定位性能需求以及最大限度地保证定位结果的可靠性,将成为未来微惯性导航系统研究的重点。
研究人员称,后续将针对如何兼顾卫导、惯导以及其他外源传感器导航完好性算法中的阶跃故障和斜坡故障等问题继续进行深入研究。
审核编辑:郭婷
-
处理器
+关注
关注
68文章
19281浏览量
229789 -
滤波器
+关注
关注
161文章
7811浏览量
178087 -
飞行器
+关注
关注
13文章
723浏览量
45510
原文标题:高密度集成微惯性导航自主完好性监测威廉希尔官方网站 研究
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
揭秘高密度有机基板:分类、特性与应用全解析

高密度Interposer封装设计的SI分析

什么是高密度DDR芯片
高密度互连,引爆后摩尔威廉希尔官方网站 革命
用于800V牵引逆变器的SiC MOSFET高密度辅助电源

mpo高密度光纤配线架解析
高密度存储系统集成必选,8盘位SATA/SAS热插拔硬盘抽取盒

射频测试电缆在高密度测试互联上的应用

高密度光纤配线架怎么安装
量子计算机——高密度微波互连模组






 工商网监
工商网监
评论