 NCAP雷达要求更新了,ADAS工程师需了解的部分
NCAP雷达要求更新了,ADAS工程师需了解的部分
欧洲新车安全评鉴协会(NCAP)近期更新了其雷达标准,以便在新车中改善驾驶辅助功能。
NCAP标准因地区而异;在美国,NCAP由国家公路交通安全管理局(又称为NHTSA)管理,而全球NCAP则是一个集中型组织。但是,所有组织都有着共同的目标:设定标准来提高汽车和驾驶安全性。这些组织提供0-5星的评级来帮助消费者在购买新车时做出明智决策。
很多情况下,Euro NCAP都率先设定标准,进而推动全球汽车行业的发展。最新的第79号条例指定了雷达在盲点检测和车道变换辅助中的最小距离和最低运行速度。
针对雷达,“最小距离和最低运行速度”一节(5.6.4.8节)可方便您查找车辆最低运行速度(Vsmin)(ACSF C类功能允许用于执行车道变换的最低速度)以及雷达支持的最小距离(Srear)。
换言之,可帮助确定盲点检测雷达传感器在20km/h的最低运行速度(按ACSF C类功能要求启动LCM)下应检测到的距离。
提高车道变换安全性
安全的车道变换可以让正在靠近的车辆有足够的时间做出反应(减速),从而确保车辆间始终可以保持安全的行驶距离。具体来说,R79条例(见第5.6.4.7部分)进行了如下定义:如果车道变换开始0.4秒后,发现目标车道上正在靠近的车辆必须以高于3m/s²的加速度进行减速,才能确保两车辆间距不会小于自主车辆1秒钟内行驶的距离,则自主车辆的此次车道变换定义为临界状态。
知道正在靠近车辆的距离和速度以及自主车辆的速度,那么在变换车道之初即可计算两车辆之间的临界距离Scritical(第5.6.4.7.1部分)。如果在开始变换车道时两车辆之间的距离小于Scritical,则不允许车道变换。图1显示了Scritical和自主车辆速度之间的函数关系。请注意,自主车辆的运行速度为20kmph时,临界距离接近180m。
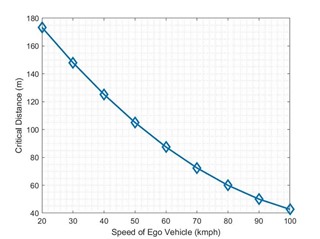
图1:进行安全车道变换所需的临界距离和速度关系图
因此,检测正在靠近的车辆并估算其距离是进行高效车道变换的关键。如条例的第5.6.4.8部分所述,每个制造商都必须声明其车辆可以可靠检测到相邻车道后方来车的最小距离(Srear)(条例要求使用两轮车测试Srear)。基于声明的Srear,此条例还定义了最低运行速度(Vsmin),即针对自主车辆可以进行车道变换计算出最低速度。图2中,根据正在靠近车辆的Srear距离,其最低运行速度为130kmph。

图2:NCAP条例中的速度和距离关系图(图片来源:联合国第79号条例)
针对自主车辆无法检测到相邻车道上正在靠近车辆的情况,该条例做出了最坏的假设,即在Srear距离处有未检测到的正在靠近车辆,且此车辆速度为130kmph。在这种情况下,不允许以低于Vsmin的速度进行车道变换。但是,假设自主车辆检测到正在靠近的目标车辆距离其小于Srear,则可以低于Vsmin的速度进行车道变换。前提是这种情况并不视为临界状态,即正在靠近的车辆和自主车辆之间的距离大于Scritical(如第5.6.4.7.1部分所述)。
TI的AWR2944是首款单芯片角雷达传感器,可帮助汽车制造商满足上述NCAP安全要求。该传感器提供了卓越的角雷达检测性能,并且集成4个发送器,可提供出色的射频性能,比传统3发送器器件的角分辨率高33%。以下是部分用例情况下的测试结果:
采用适用于角雷达的TI毫米波雷达传感器来满足NCAP要求
汽车配备检测距离更远的高分辨率雷达后,可在更远距离更快地检测到迎面驶来的车辆,从而更安全地变换车道和通过十字路口。TI的角雷达可帮助汽车制造商满足最新的NCAP安全要求,在全球范围内打造更安全的驾驶体验。
其他资源:
AWR2944产品文件夹
高端角雷达参考设计
购买AWR2944评估板
订购AWR2944器件样片
该文章由Adeel Ahmad、Jitendra Gupta、Sandeep Rao和Bhavin Kharadi共同编写。
关于德州仪器(TI)
德州仪器(TI)(纳斯达克股票代码:TXN)是一家全球性的半导体公司,致力于设计、制造、测试和销售interwetten与威廉的赔率体系 和嵌入式处理芯片,用于工业、汽车、个人电子产品、通信设备和企业系统等市场。我们致力于通过半导体威廉希尔官方网站 让电子产品更经济实用,创造一个更美好的世界。如今,每一代创新都建立在上一代创新的基础之上,使我们的威廉希尔官方网站 变得更小巧、更快速、更可靠、更实惠,从而实现半导体在电子产品领域的广泛应用,这就是工程的进步。这正是我们数十年来乃至现在一直在做的事。
商标
所有注册商标和其它商标均归其各自所有者专属。
审核编辑 黄昊宇
-
嵌入式处理
+关注
关注
0文章
341浏览量
10012 -
雷达
+关注
关注
50文章
2930浏览量
117473 -
adas
+关注
关注
309文章
2184浏览量
208634
发布评论请先 登录
相关推荐

爱普生晶体在车载系统应用案例-ADAS系统的部分应用


FPGA算法工程师、逻辑工程师、原型验证工程师有什么区别?


嵌入式软件工程师和硬件工程师的区别?







 工商网监
工商网监
评论