 制作一个易于使用的自动宠物喂食器
制作一个易于使用的自动宠物喂食器
这是一个易于使用的自动宠物喂食器,带有一些 3D 打印部件、可调节的喂食时间和可调节的喂食部分。
背景
前段时间,我一直在玩微控制器,并想尝试从教程中脱离出来。并且前段时间因为疫情,我家的小狗的喂养计划也开始受到影响,并导致一些明显的不适。有的时候我会无法回家喂养我的好伙伴。所以我需要找到一个解决方案,当我不能回家的时候,我的狗也不会挨饿。
喂食器
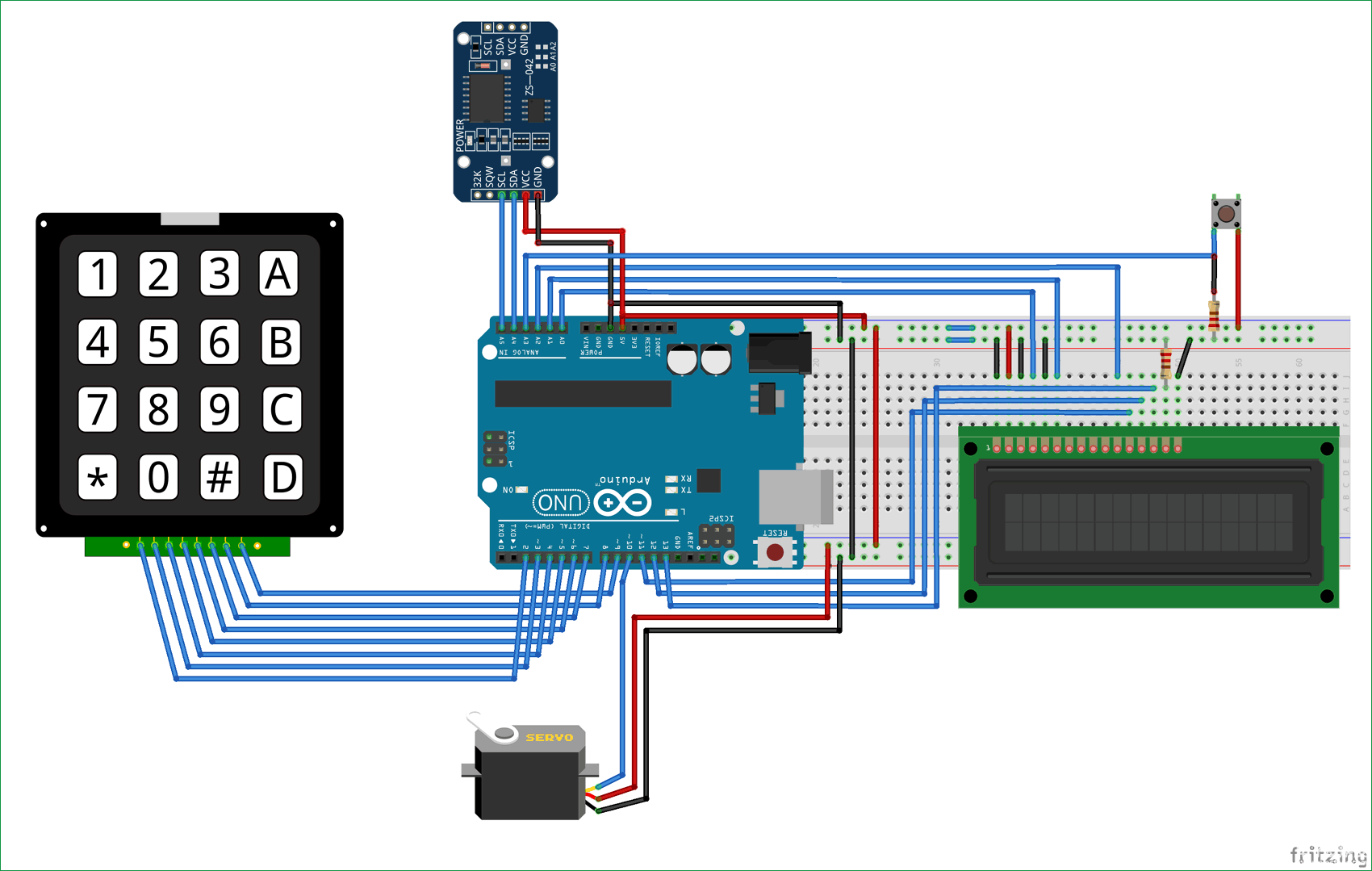
我的狗喂食器使用 Arduino 微控制器。我需要的一些关键功能是大多数其他版本的喂狗器所没有的。即,一种用于停电恢复喂养和解决食物卡在分配机构中的问题的解决方案。我所在的地区有时也遭受随机停电的困扰。停电通常不会持续很长时间,因此我认为不需要电源冗余。我还想要一些易于拆卸和清洁的东西。清洗 3D 打印部件时要小心,您可以使用温水,而不是热水,除非您打算使用 ABS 或 PET-G 进行打印。
完整的功能列表如下
一天喂两次
使用实时时钟准确计时
实时时钟的手动时间更改
手动进纸选项
主屏幕上的喂食时间、当前时间和喂食完成情况概览
易于导航的菜单
停电投料恢复(重新上电时投料)
进给时间和完成情况安全地存储在 EEPROM 中
如果食物在分配时卡住,伺服会“抖动”
需要什么?
4x M3-0.5 x 16 mm 螺丝(编码器轮)
4x M3-0.5 x 10 mm 螺丝(伺服支架)
12x M3 六角螺母
4x M3 锁紧螺母
16x 1-1/2 英寸(38 毫米)多用途木螺钉
木胶
6x 0.315 x 0.118 英寸(8 x 3 毫米)磁铁
1-1/2 x 1-1/2 英寸(3.8 x 3.8 厘米)木材用于支腿和伺服安装
1/2 x 6 英寸(1.27 x 15.24 厘米)木材用于背部和底座
3D打印零件
我最近获得了一台 3D 打印机,与此同时我就在想,没有什么比为我的宠物喂食器打印定制零件更好的学习和使用方法了。打印的所有内容都是 PLA+,使用 Ender 3 Pro 打印,使用 Cura 作为切片机。所有部分的 STL 都可以在 Github 项目页面上找到。链接在文章底部。阅读 README 文件以获取打印说明和切片器设置。

外壳
外壳的设计考虑到了方便和简单。无需螺钉或螺母。只需将组件弹出和弹出即可。每个插件都有 4 个用于将组件固定到位的标签。

尽管我最初确实弄乱了 LCD 屏幕插槽,但我还是返回并在 Fusion 360 中修复了模型。我只是懒得回去重新打印它。我使用了一些额外的 M3 0.5 x 6mm 螺钉来固定它。LCD 插槽的每个角落都有四个带孔的垫片,因此您可以在需要时固定屏幕。不幸的是,在我把所有东西都放进去之前,我从来没有拍过外壳盖的照片。
编码器轮附件
轮式编码器轮有两个用途:
为 Arduino 提供来自伺服的位置反馈
将橡胶桨连接到伺服器
一个进给部分等于车轮的 1/6(60 度)转。使用食物秤来测量您的宠物每次喂食的食物量,然后调整份数,直到您获得满足该数量的范围。我相信对我来说一次喂食大约是 173 克食物。17 份的份量给了我每次喂食 170-177 克的范围。这一切都取决于你的粗磨食物的大小。确保喇叭位于 8 个 M3 六角螺母之间。

伺服支架和霍尔传感器安装座
这个定制的伺服支架还固定霍尔传感器并将伺服安装到一块 1-1/2 x 1-1/2 英寸(3.8 x 3.8 厘米)的木头上。木头的长度将取决于伺服器的位置。安装座有很大的误差空间,所以不要太担心长度是否完美。
确保您选择了足够强大的伺服并将其设置为最大电压。我选择的那个产生了 6.5 kg.cm @ 6 Volts

漏斗、食物滑槽和滑槽导轨
这构成了食品配送系统。食物从分配器通过漏斗落到滑槽上并进入食物碗。不幸的是,在安装滑道导轨之前,我没有拍下它的照片。

我开始做的第一件事是从连接到分配器上的桨轮的杆上取下旋钮。我用手锯拆下旋钮。如果你碰巧有一个电动工具,你可以使用它。不要在银色部分结束的地方进一步切割杆。在旋钮的底部切开。

锯掉旋钮后,通过切割上面最后一张图片中的 3 个支撑来去除剩余的材料。这花了相当长的时间。我想如果你有合适的电动工具会更快。卸下这三个支撑后,留在杆本身上的剩余部分应该用一点肘部油脂脱落。您必须打磨最靠近旋钮的杆部分,以便它很好地适合编码器轮。

接下来,我们开始构建框架的基础。我把 1/2 x 6 英寸(1.27 x 15.24 厘米)的木头切成两块 8 英寸(20.32 厘米)的块。这将构成进料器框架的底座和背面。涂上一些木胶,然后使用 2 个多功能钉子将它们连接成 L 形。您将需要添加几个直角支撑来加强后面板和底板的连接。使用 4 个多用途螺丝和一些木胶将它们固定到背板和底板上。我没有这一步的图片,但你可以在下面的图片中看到它们。

从这里您必须将分配器支架切成约 4.5 英寸(11.43 厘米)的高度。它不一定是完美的。尽量靠近它。漏斗允许一些摆动空间。将支架切成合适的尺寸后,将其靠背放置,并确保它平放在底座上。将其放置到位后,使用铅笔或钢笔标记容器分配端的中心位置。然后,您需要在底板上钻一个 2 英寸(5.08 厘米)的孔。至关重要的是,您测量两次并用这个切割一次。这将是上图中看到的孔。
在底板上钻孔后,我们就可以将分配器支架连接到背板上了。您要做的是将支架靠在后面板上(如下面的第一张图片所示)。分配器支架的环下方有两个小房间。这是您希望孔所在的位置(见下图)。使用铅笔或钢笔在后面板上标记两个孔的高度。您希望它们尽可能靠近分配器支架的中心。有两个螺钉将支架的顶环连接到您切断的下部。钻孔时小心不要撞到那些。再次,记住测量两次并钻孔一次。或者两次,在这种情况下。

现在我们已经钻孔,我们可以使用 5/16 英寸六角螺栓、5/16 英寸六角螺母和 5/16 英寸垫圈将支架连接到背板上。您想继续推动螺栓穿过,确保在推动螺栓之前将垫圈放在螺栓的六角端。在它们从另一侧出来后,将另一组垫圈放在螺纹侧,然后开始用手拧紧六角螺母。这会有点棘手。用手拧紧螺母后,您必须使用套筒固定螺母并进一步拧紧。只有大约 1/4 转左右。注意不要拧得太紧。

现在支架已安全固定,我们现在可以添加伺服将要放置的 1/2 x 1/2 英寸的木头。这个长度将取决于你的伺服器将坐在哪里。继续并通过将伺服器连接到编码器轮上的喇叭和编码器轮到塑料容器内的橡胶桨来组装进给机构。将容器向下放入顶环中,然后从底板测量伺服器的位置。不要担心它是否完美。伺服支架允许相当多的摆动空间。使用木胶和一个多功能螺丝固定木架。

下一步是将支腿连接到进纸器的底板上。腿的长度将取决于你宠物的食物碗有多高。我的狗把她的食物碗放在一个高高的架子上;因此,我需要我的喂食器坐得很高。使用 4 个多用途螺丝和一些木胶将它们固定到位。我确实建议在两条前腿和两条后腿之间放置一个横梁,并在横梁之间放置另一个横梁,如下所示,以增加稳定性。总共使用 6 个多用途螺钉和一些木胶将部件固定到腿上。

接下来的步骤是:
将漏斗插入我们在底板上钻的孔中
将伺服连接到伺服支架
将支架固定到木架上
使用 4 个 M3 x 10 mm 螺钉和 4 个 M3 六角螺母将伺服器连接到支架上。伺服固定好后,我们可以将支架固定在木制伺服支架上。使用两颗多用途螺丝将支架轻轻固定在木架上。不要拧得过紧,否则会损坏支架。确保按该顺序执行这些步骤。漏斗会稍微抬高伺服器,它非常贴合塑料容器的末端,所以如果塑料容器已经放在顶环支架上,就不可能放上去。

最后的步骤是连接滑槽的滑入式支架和滑道本身。您希望将支架稍微放在底板上的孔后面。您希望它尽可能向前,以便滑块清除进纸器的框架。使用两个多用途螺钉将支架固定到框架底板的底部。最好使用支架中的滑块来执行此操作,因为支架有一些弯曲,您需要在滑块和支架之间有一个非常牢固的配合。

虽然我从来没有拍过焊接过程的照片。但这对我来说没什么。只需将每个组件焊接到其相应的引脚上,就可以了。如果您想改用排针,您也可以这样做。Arduino 插槽下方和上方有足够的间隙以容纳引脚和连接器。我绝对建议将所有组件焊接在一起,然后再将所有组件放入各自的插槽中。
我通过不受管制的外部电源引脚(引脚 30)为我的 Arduino 供电。这需要 7-20 伏之间的输入电压,因为该电压是通过 Arduino 的板载稳压器馈入的。如果您想通过 USB 为其供电,您只需确保为它提供 5 伏电压,而不是 7-20 伏电压。
务必在霍尔传感器的 Vcc 和 Signal 引脚之间焊接 10k Ohm 电阻。此外,不要忘记将所有组件连接到公共地线。我犯了一个错误,错过了一个理由,我的系统可以工作一段时间,但霍尔传感器最终会开始出现故障。那对我的狗来说真是“美好”的一天。
我最终为霍尔传感器和伺服连接制作了定制连接器。我将电线焊接到公针头上。这些挂在外壳底部。对于霍尔传感器,我通过切割、剥离和焊接几根我躺在身边的杜邦连接器线制作了一个定制的母头适配器。
对于 Vcc 和接地轨,我将电源轨部分从我周围的一些额外的永久原型面包板上切掉。你周围的任何类似的东西都会起作用。在将导轨放入插槽之前,请仔细检查您的连接。一旦进入,这是最难摆脱的事情。我也以艰难的方式学到了这一点。
最终成果:

-
DIY设计
+关注
关注
2文章
59浏览量
19801 -
3D打印
+关注
关注
26文章
3547浏览量
109037 -
喂食器
+关注
关注
1文章
23浏览量
3063
发布评论请先 登录
相关推荐
基于单片机的宠物定时自动喂食器设计(原理图&程序)


用Arduino Uno制作一个智能的自动宠物喂食器






 工商网监
工商网监
评论