 Raspberry pico处理器的移植SMP教程
Raspberry pico处理器的移植SMP教程
Raspberry pico 是一款双核cortex-m0的处理器,在RT-Thread提供的bsp中目前是默认采用libcpu/arm/cortex-m0,其并没有对多核进行支持。在Coremark的测试中pico的性能很一般,只用一个核心实在是太浪费了,所以下面用一种不太优雅的方式基本实现Pico的SMP,简单测试没有问题,当然由于萌新对于内核的理解程度有限,总是可能存在一些问题,不过总算跑起来了不是~
移植SMP
在这之前,官方的文件完全没有支持Cortex-M的多核。
首先是几个基本的函数对接:
rt_hw_cpu_id:最首先需要实现的一个也是最容易的实现的一个,直接访问pico的sio就可以

rt_hw_interrupt_disable/enable: 在SMP框架当中,关闭中断不只是屏蔽中断,其还要通过spinlock来保证对资源访问的互斥,对于此rtt在rthw通过宏定义将其替换,并且重新命名原来的中断控制函数

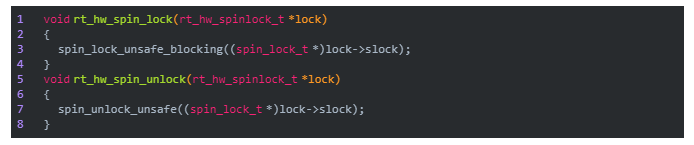
rt_hw_spin_lock_xxx:自旋锁,用于多核之间的资源保护,在rp2040中芯片提供硬件spinlock使用,这一部分同样使用pico-sdk的api即可,选择unsafe版本
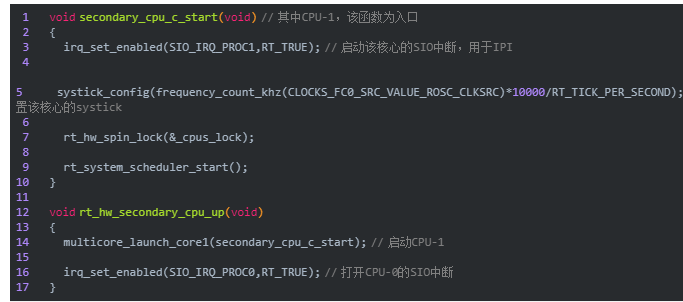
rt_hw_secondary_cpu_up:在主CPU启动后,运行调度器,调度器会调用main线程运行,main线程运行前会首先调用该api来启动第二个核心。Rp2040两个核心其实是上电以后同时启动的,CPU-1会在bootrom中被拦截下来进入等待状态,我们可以通过sio的fifo来唤醒第二个核心,pico-sdk中提供了api,可以直接指定CPU-1唤醒后执行的函数。在唤醒过程中同时使能两个CPU的SIO中断,用来进行IPI_Handler.
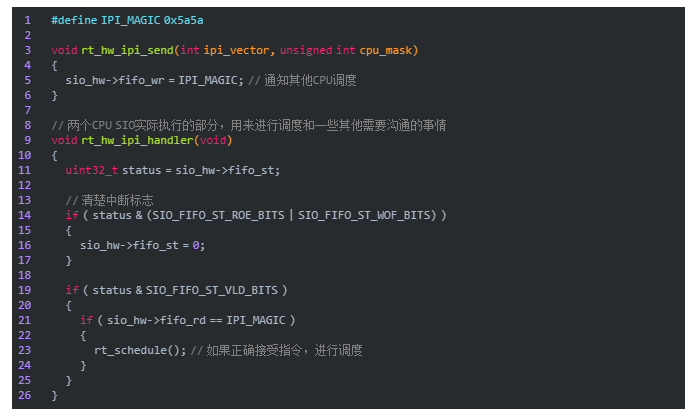
在需要调度的时候,CPU之间可能会互相通知让其进行调度,该部分通过rt_hw_ipi_send和rt_hw_ipi_handler对接,
上面对接的函数都比较基础,其次是对接上下文的汇编代码部分,这一部分就不是特别顺利了。简单梳理一下Cortex-M的调度流程,rt_schedule获取最高优先级的任务然后使能PendSV中断并在全局变量中保存调度信息,最后在完成高优先级中断(或者直接进行PendSV)后进行实际的上下文切换,在SMP中基本同理,但是由于RT-Thread的SMP是针对Cortex-A提供的,这里出现了一些问题。
首先在调度中必须关注一个函数,rt_cpus_lock_status_restore(thread),其将要调度的线程绑定到当前的cpu上,调用该函数的位置是一个关键问题
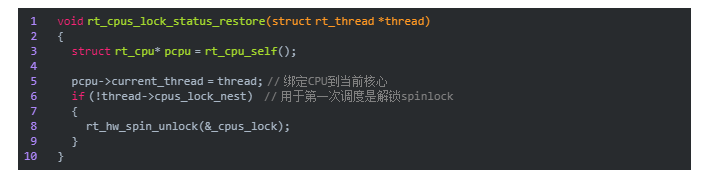
在Cortex-A中其在rt_hw_context_switch中被调用,这对于Cortex-A是可行的,因为在非中断情况下A核会直接进行线程切换而不需要PendSV,但是对于Cortex-M核心放在这个位置会存在下面一个问题:PendSV是中断,所以需要使能中断才能运行,因此在rt_hw_context_switch后立马就有一个rt_hw_interrupt_enable,如果M核工作在非SMP框架下这是没有问题的,但是在SMP框架下当前的线程已经变了,而rt_hw_interrupt_enable是同当前线程绑定的,所以这里会导致CPU的scheduler_lock_nest,cpus_lock_nest错乱,从而导致调度器不能正常工作
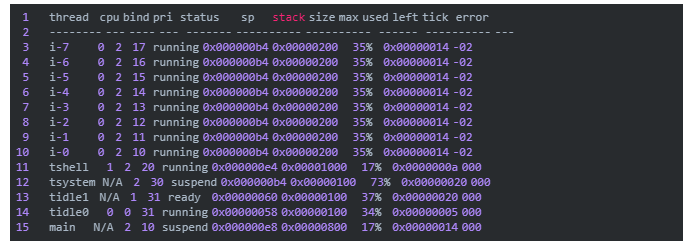
基于上面的描述,我考虑把rt_cpus_lock_status_restore放在PendSV中进行调用,这样就可以保证scheduler_lock_nest工作的正确性,但是导致一个更大的问题!!!在rt_schedule函数中,如果中断还没有使能的情况下重复调用rt_schedule(systick中多层中断)会导致已经被标记为RUNNING的线程无法正常被加入到就绪列表中。因为在上一次的rt_schedule中线程已经被移除了,其等待在PendSV中绑定到当前CPU的时候rt_schedule再次到来,其应该被重新加入到就绪列表(如果优先级低的话),但是schudler是基于当前CPU上的线程来管理的,由于之前被调度的线程当前还没有绑定,所以线程变成游离状态而无法被调度,就会出现下面的情况:
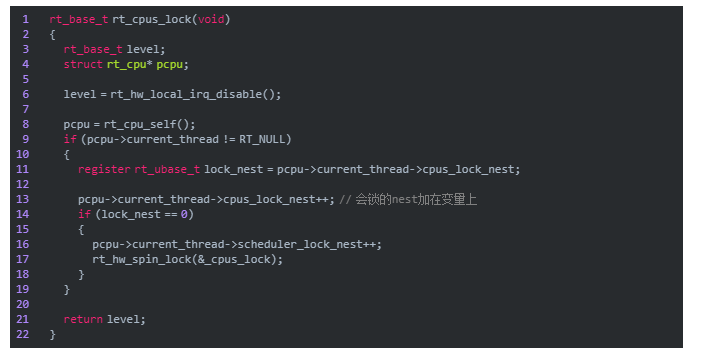
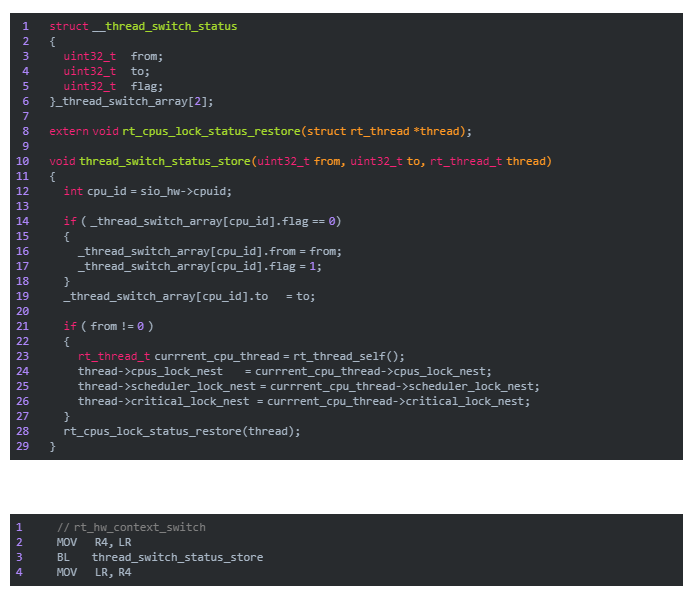
所以rt_cpus_lock_status_restore(thread)只能在rt_hw_context_switch中被调用,但这种情况下我们需要处理scheduler_nest和cpus_lock_nest错乱的问题,由于SMP框架将nest绑定到线程上,但实际上锁针对的还是CPU,我也认为将太绑定到CPU上更合适,为了不修改内核源码的情况下实现,我在rt_hw_context_switch中将当前cpu线程的nest绑定到需要调度的线程上,这样就等价于把nest绑定到CPU上,此时就可以正常工作了。
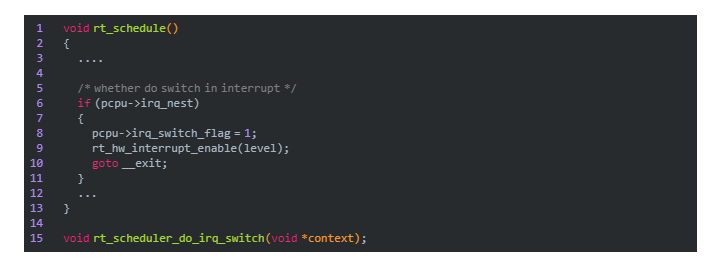
解决上述问题后知剩下最后一个问题,我们前文的讨论都是基于非中断情况下的,对于Cortex-M而言中断中的调度和非中断中的调度是一致的,都是基于PendSV实现的,所以我们rt_hw_context_switch,rt_hw_context_interrupt_switch用一套一样的代码就可以,但是在SMP框架中这两个部分具有两个调度函数,在中断中调用rt_schedule,SMP框架会直接跳过当前调度并且给当前CPU打上中断调度标记,最后在离开中断的时候调用rt_scheduler_do_irq_switch(void *context)来实现,对于Cortex-A的中断结构来说这是没有问题的,只要保证switch能够在本次调度过程中直接切换就行,但是对于Cortex-M这样就不太合适,我们可以把NVIC弄成统一IRQ的样子,但是我觉得直接废弃rt_scheduler_do_irq_switch更加合适。
为了使得调度器不知道我们在中断状态,我把rt_interrupt_enter/leave注释掉了(应该在涉及内核调度的中断中全部采用这种办法),这样irq_nest就一直是0,调度器也不会去调用do_irq了,其实我们不用这个处理方法也能够工作的,但是中断中就没法调度了,实时性也没法保障。按照我的理解在Cortex-M中这样的处理并不会有太大的问题,但是总不太好是吧~

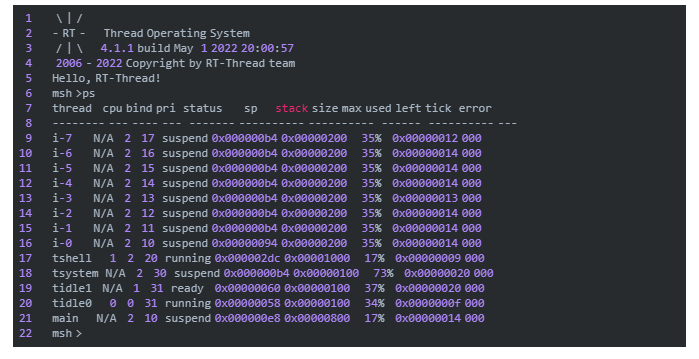
最后基于上面全部的修改,RP2040的SMP能够正常工作,小灯能够按照正常闪烁。
最后
我对于RT-Thread的理解还很有限,萌新,有很多问题我可能预料不到,这样的实现方式我也觉得不太优雅,不过总算是跑起来了(肝了两天还是有点累emmm)。后续会优化整理并且再经过一段时间的测试,或许能够喜提自己的第一个RT-Thread PR ~
最后是关于SMP,我不明白为什么把nest绑定到thread而不是cpu上,因为总还是在锁cpu,其次rt-thread的smp似乎是专门给A核设计,目前的多核MCU也有蛮多,希望可以提供一些相关支持。
Attention please!!(2022-5-12): 评论区有提供bsp的压缩包
只是一个可以玩玩的状态,目前可以确定的是存在和调度相关的bug会导致系统崩溃(目前测试在shell反复调用list_thread可能崩溃,可能和kservice有关)。
另外如果线程在调度器启动前被创建,即INIT_BORAD_EXPORT方式创建则一切正常(list_thread不会崩溃),在main中创建就可能出现崩溃,希望各位大佬可以给点调试思路。
由于最近事情很多比较忙绿,没有时间调试和阅读代码,但会在后续一段时间(六月-七月)调试完善smp调度并在后续添加完善pico的驱动支持,希望感兴趣的同学一起交流哈。(也在看看rtthread v5.0的消息哈)
-
SMP
+关注
关注
0文章
74浏览量
19659
发布评论请先 登录
相关推荐
Raspberry Pi Pico是什么
微控制器开发板Raspberry Pi Pico
使用raspberry pi Pico的原因
多核处理器分类之SMP与NUMA简析
Raspberry Pi 4/3B的Pico开发板
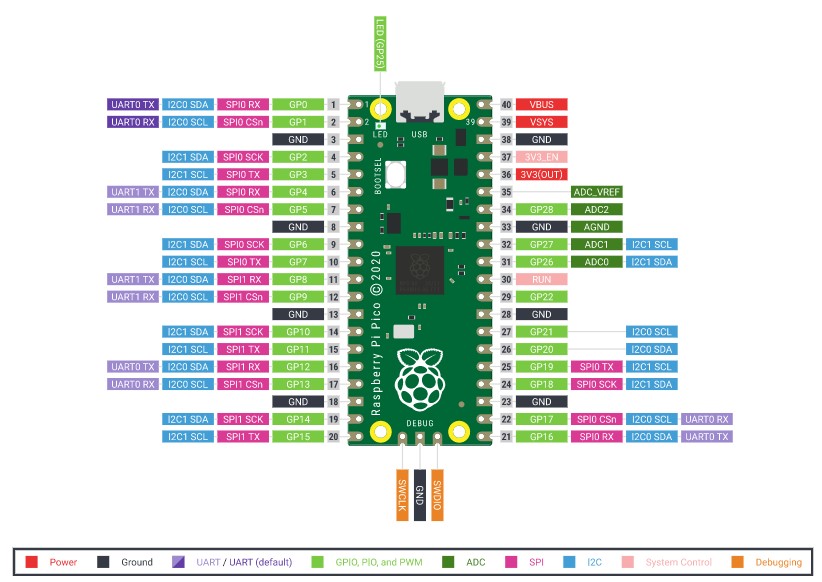
一个印有PINOUT的Raspberry Pi pico分线板
RT-Thread框架下的SMP支持
如何在Raspberry Pi Pico中使用OLED显示器

免费Pico模拟器上的Raspberry Pi Pico和LCD1602接口
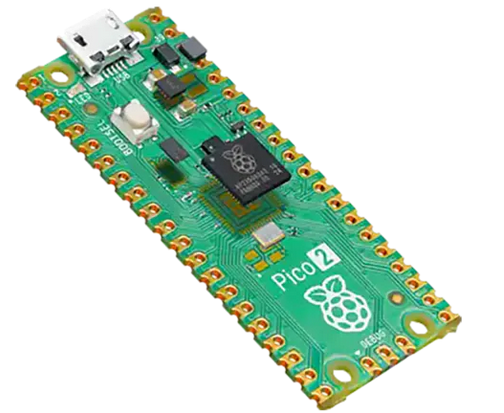
Raspberry Pi Pico 2
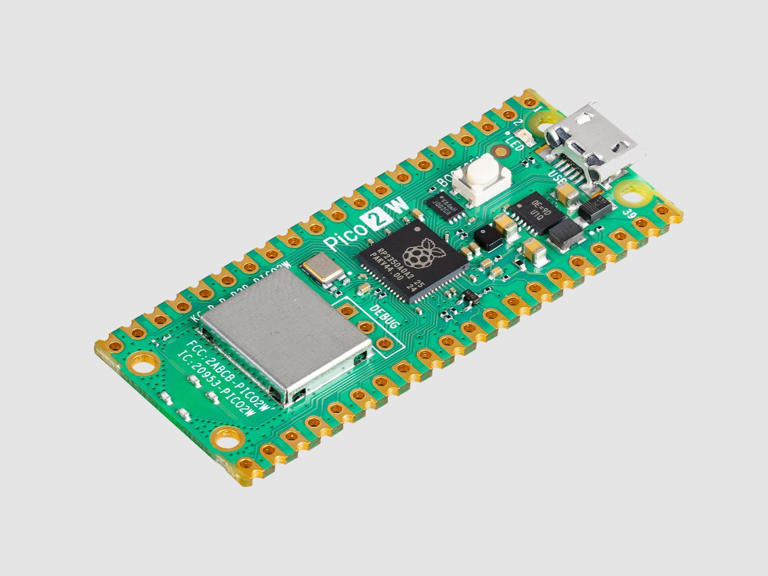
Raspberry Pi Pico 2 W 发布





 工商网监
工商网监
评论