 使用Wii nunchuk手柄连接Arduino控制伺服电机的方法
使用Wii nunchuk手柄连接Arduino控制伺服电机的方法
简介
偶然在箱子里发现一个旧的Wii Nunchuk手柄,又叫“双节棍”手柄,我想它是否可以用来控制Arduino,查阅了相关资料,确定Nunchuk手柄支持I2C方式连接到Arduino, 通过不断地研究深入,最后从todbot.com等网站上找到了相关的控制Will nunchuk的代码,于是就将代码移植过来,实现了 Will nunchuk 对伺服电机的控制!
Wii Nunchuk接口定义
把Wii Nunchuk和Arduino连接起来有几种方法,我们可以买一个Wii nunchuk的适配器,或者像剪断连接线,确保手柄再不需要和Wii连接使用了。本文采用了剪断线的方法,剪线之后再焊接了插针到nunchuk的连线,这样就可以和面包板更好的连接了。下图是Wii Nunchuk的接口定义 。

Wii Nunchuk手柄接口定义
Wii Nunchuk连接Arduino
手柄白线 (GND) –》 Arduino GND
手柄红线 ( +5V ) –》 Arduino 5V
手柄绿线 (SDA) –》 interwetten与威廉的赔率体系 引脚 4 或者 专用的 SDA pin
手柄黄线 (SCL) –》 模拟引脚 5 或者 专用的 SCL pin
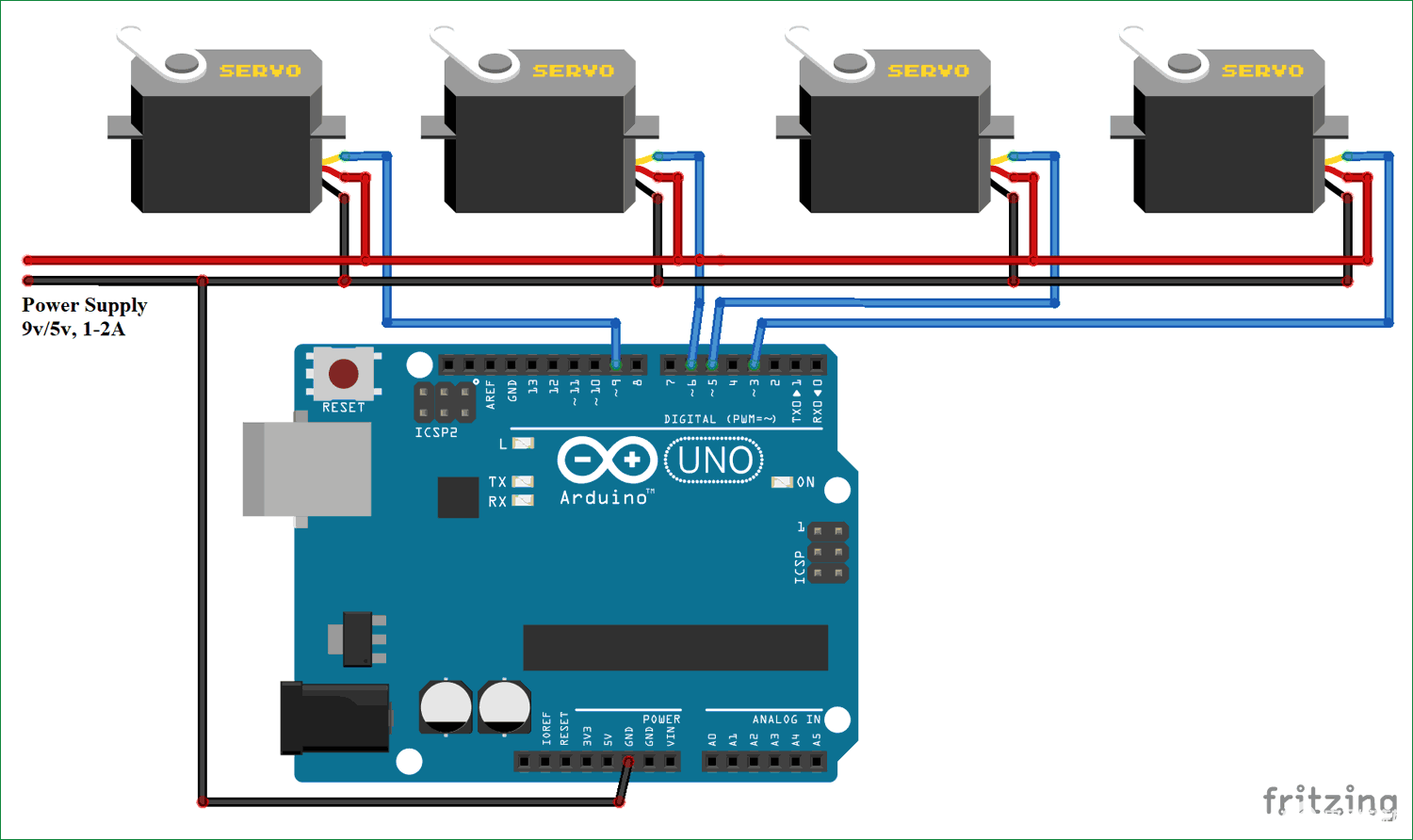
连接伺服电机到Arduino
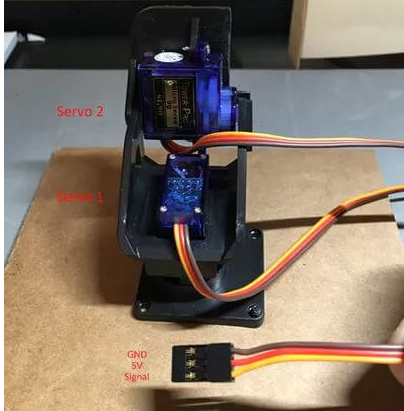
双轴舵机云台
Servo 1 (x-axis)
舵机棕线 (GND) –》 Arduino GND
舵机红线 (5V) –》 Arduino 5V
舵机黄线 (data/Signal) –》 Arduino Pin 10
Servo 2 (y-axis)
舵机棕线 (GND) –》 Arduino GND
舵机红线 (5V) –》 Arduino 5V
舵机黄线 (data/Signal) –》 Arduino Pin 9
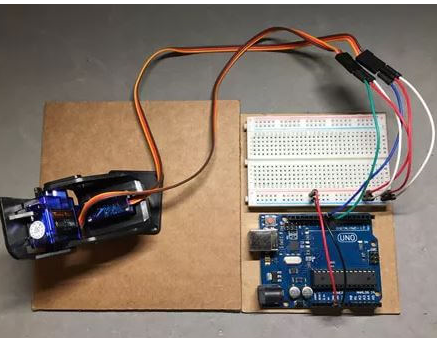
舵机云台连接Arduino UNO
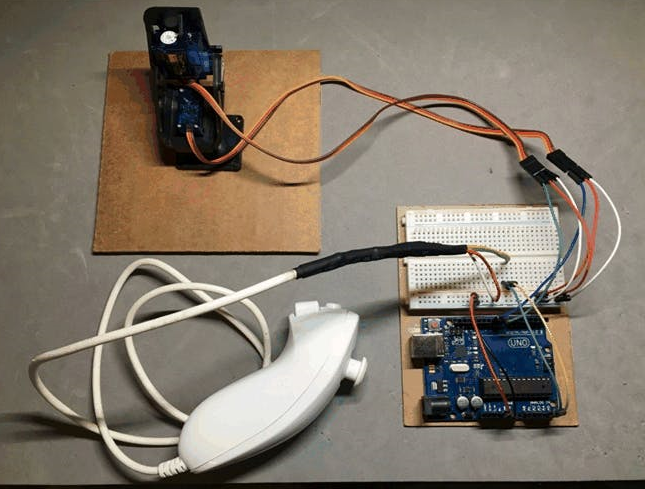
连接全部组件
代码部分
使用Arduino IDE上传代码前,需要两个标准库: Wire.h 、 Servo.h 。
代码的执行顺序如下:
初始化Nunchuk手柄的I2C接口;
初始化伺服系统 ;
读取Nunchuk手柄的数据;
根据读取得 Nunchuk 手柄的实时数据控制伺服电机运动。
完整代码如下:
/*
* NunchuckPrint
* 2007 Tod E. Kurt, http://todbot.com/blog/
* Change log:
*
* Mark Tashiro - Changed Wire.read to Wire.write
* Changed Wire.receive to Wire.read
* Added code for servos
*/
#include
#include
Servo servoLeft; // Define left servo
Servo servoRight; // Define right servo
static uint8_t nunchuck_buf[6]; // array to store nunchuck data,
void setup()
{
Serial.begin(19200);
servoLeft.attach(10); // Set left servo to digital pin 10
servoRight.attach(9); // Set right servo to digital pin 9
nunchuck_setpowerpins(); // use analog pins 2&3 as fake gnd & pwr
nunchuck_init(); // send the initilization handshake
Serial.print ("Finished setup\n");
}
void loop()
{
nunchuck_get_data();
// map nunchuk data to a servo data point
int x_axis = map(nunchuck_buf[0], 23, 222, 180, 0);
int y_axis = map(nunchuck_buf[1], 32, 231, 0, 180);
//move servo to desired position based on Wii nunchuk reading
servoLeft.write(x_axis);
servoRight.write(y_axis);
// un-comment next line to print data to serial monitor
// nunchuck_print_data();
}
//
// Nunchuck functions
//
// Uses port C (analog in) pins as power & ground for Nunchuck
static void nunchuck_setpowerpins()
{
#define pwrpin PORTC3
#define gndpin PORTC2
DDRC |= _BV(pwrpin) | _BV(gndpin);
PORTC &=~ _BV(gndpin);
PORTC |= _BV(pwrpin);
delay(100); // wait for things to stabilize
}
// initialize the I2C system, join the I2C bus,
// and tell the nunchuck we're talking to it
void nunchuck_init()
{
Wire.begin(); // join i2c bus as master
Wire.beginTransmission(0x52); // transmit to device 0x52
Wire.write(0x40); // sends memory address
Wire.write(0x00); // sends sent a zero.
Wire.endTransmission(); // stop transmitting
}
// Send a request for data to the nunchuck
// was "send_zero()"
void nunchuck_send_request()
{
Wire.beginTransmission(0x52); // transmit to device 0x52
Wire.write(0x00); // sends one byte
Wire.endTransmission(); // stop transmitting
}
// Receive data back from the nunchuck,
int nunchuck_get_data()
{
int cnt=0;
Wire.requestFrom (0x52, 6); // request data from nunchuck
while (Wire.available ()) {
// receive byte as an integer
nunchuck_buf[cnt] = nunchuk_decode_byte(Wire.read());
cnt++;
}
nunchuck_send_request(); // send request for next data payload
// If we recieved the 6 bytes, then go print them
if (cnt >= 5) {
return 1; // success
}
return 0; //failure
}
// Print the input data we have recieved
// accel data is 10 bits long
// so we read 8 bits, then we have to add
// on the last 2 bits. That is why I
// multiply them by 2 * 2
void nunchuck_print_data()
{
static int i=0;
int joy_x_axis = nunchuck_buf[0];
int joy_y_axis = nunchuck_buf[1];
int accel_x_axis = nunchuck_buf[2]; // * 2 * 2;
int accel_y_axis = nunchuck_buf[3]; // * 2 * 2;
int accel_z_axis = nunchuck_buf[4]; // * 2 * 2;
int z_button = 0;
int c_button = 0;
// byte nunchuck_buf[5] contains bits for z and c buttons
// it also contains the least significant bits for the accelerometer data
// so we have to check each bit of byte outbuf[5]
if ((nunchuck_buf[5] >> 0) & 1)
z_button = 1;
if ((nunchuck_buf[5] >> 1) & 1)
c_button = 1;
if ((nunchuck_buf[5] >> 2) & 1)
accel_x_axis += 2;
if ((nunchuck_buf[5] >> 3) & 1)
accel_x_axis += 1;
if ((nunchuck_buf[5] >> 4) & 1)
accel_y_axis += 2;
if ((nunchuck_buf[5] >> 5) & 1)
accel_y_axis += 1;
if ((nunchuck_buf[5] >> 6) & 1)
accel_z_axis += 2;
if ((nunchuck_buf[5] >> 7) & 1)
accel_z_axis += 1;
Serial.print(i,DEC);
Serial.print("\t");
Serial.print("joy:");
Serial.print(joy_x_axis,DEC);
Serial.print(",");
Serial.print(joy_y_axis, DEC);
Serial.print(" \t");
Serial.print("acc:");
Serial.print(accel_x_axis, DEC);
Serial.print(",");
Serial.print(accel_y_axis, DEC);
Serial.print(",");
Serial.print(accel_z_axis, DEC);
Serial.print("\t");
Serial.print("but:");
Serial.print(z_button, DEC);
Serial.print(",");
Serial.print(c_button, DEC);
Serial.print("\r\n"); // newline
i++;
}
// Encode data to format that most wiimote drivers except
// only needed if you use one of the regular wiimote drivers
char nunchuk_decode_byte (char x)
{
x = (x ^ 0x17) + 0x17;
return x;
}
-
伺服电机
+关注
关注
85文章
2046浏览量
57820 -
Arduino
+关注
关注
188文章
6469浏览量
186966
发布评论请先 登录
相关推荐
如何使用Arduino的蓝牙控制伺服电机

如何使用Arduino开发板通过蓝牙方式控制伺服电机
arduino连接ps2手柄控制智能小车实践记录

基于Arduino UNO的手势控制伺服电机
如何使用操纵杆和Arduino控制伺服电机






 工商网监
工商网监
评论