 AMR传感器如何区分北极和南极
AMR传感器如何区分北极和南极
如今有许多不同的方法可测量移动和旋转元件的位置。除了光学编码器、霍尔传感器和旋变器外,还有基于磁阻效应的磁传感器可供使用。磁阻效应分三种:巨磁阻(GMR)效应、隧道磁阻(TMR)效应和各向异性磁阻(AMR)效应,本文将深入探讨最后一种效应。
ADI的 ADA4570 AMR传感器利用了铁磁性材料的特性,即电阻取决于磁化方向——该现象由William Thomson(Kelvin勋爵)于大约1851年发现:

其中α为磁化方向与电流方向的夹角。
在线性位移测量中,为获得最佳传感器响应,传感器的位置应适当,以使磁体和传感器处于同一平面,并且磁体的中心与传感器的中心一致。由于AMR传感器无法区分北极和南极,因此不能改变磁体的位置。
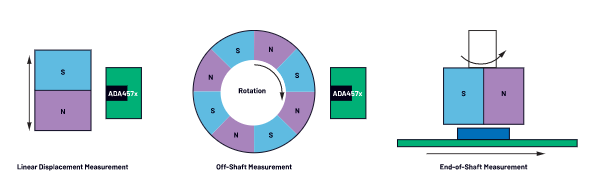
图1.线性位移测量(左)、离轴测量(中)和轴尾测量(右)
对于旋转元件,所谓的离轴或轴端是常见的配置。在离轴配置示例中(参见图1),传感器正弦/余弦输出重复每极的绝对信息——例如,4极对磁体是45°。
在轴端配置中(参见图1),传感器位于旋转偶极磁体下方;在这种情况下,北极和南极在磁体中心上方形成一个匀强磁场。适当定位传感器,使得磁场和要测量的元件处于同一平面。典型应用是无刷直流电机中的转子位置测量和控制。AMR传感器是180°角传感器,因此电机必须是偶数极对电机;奇数极对的电机需要360°信息以便换向。与常规霍尔传感器(其也用于电机控制)相比,AMR传感器如ADA4570和 ADA4571 具有更高的精密性。AMR传感器还能降低扭矩纹波,并在启动后或空闲状态提供与电机位置无关的真正上电绝对位置信息。
ADI的AMR威廉希尔官方网站 通过两个惠斯通电桥测量角度,一个电桥相对于另一个电桥旋转45°(参见图2)。角度通过正弦和余弦函数计算,代表相对于传感器(ADA4570)的0°到180°的方向。

AMR传感器区分电气角度和机械角度。由于AMR传感器的工作原理和上述惠斯通电桥之间的45°角,机械旋转180°后,绝对角度便可通过式2测量得到。对于偶极磁体,经过360°旋转,电气周期重复两次。当AMR传感器在饱和情况下工作,在某一最小磁场强度时,绝对场强便与此无关,由此展现出在强磁条件下工作时鲁棒系统的裕量。
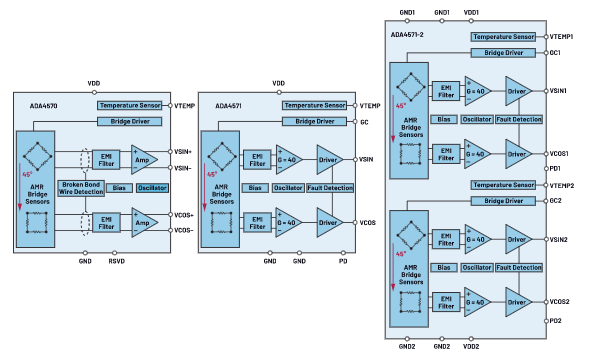
图2.ADA4570、ADA4571和ADA4571-2 AMR配置,惠斯通电桥彼此成45°角
除了光学传感器、霍尔传感器和旋变器外,磁传感器在很多不同应用中提供了一种更加优雅、高精度和鲁棒性的位置测量解决方案,ADI为此提供了许多可能性,例如ADA4570、ADA4571和 ADA4571-2 (适合需要冗余的情况)。
-
ADI
+关注
关注
146文章
45821浏览量
249933 -
磁传感器
+关注
关注
5文章
244浏览量
23444 -
AMR传感器
+关注
关注
0文章
13浏览量
10195
发布评论请先 登录
相关推荐
VCS1375R磁开关传感器中文手册
VCS1385磁开关传感器中文手册
一款基于各向异性磁电阻(AMR)威廉希尔官方网站 的角度传感器IC-AM100

如何区分传感器的灵敏度、分辨率和精度

VCS1375R全极性磁开关传感器中文手册
怎么区分PNP传感器和NPN传感器
TMAG6180-Q1汽车类高精度模拟AMR 360°角度传感器数据表

TMAG6181-Q1具有集成圈数计数器的高精度模拟AMR角度传感器数据表
传感器融合如何使 AMR 在工厂车间内高效移动
如何设计具有AMR角度传感器的位置感应系统呢?

集成 AMR 取代磁簧开关和霍尔效应传感器





 工商网监
工商网监
评论