 Micro-ROS:把ROS2放在MCU上
Micro-ROS:把ROS2放在MCU上
对于熟悉机器人应用的读者,ROS想必定是不会陌生的。ROS可以说是目前机器人相关开源社区最流行的项目。每一种类型的机器人都需要以硬件的实际情况编写符合用户需要的功能,起初代码的复用率很低,大大阻碍了机器人的发展。
ROS便是为机器人在研发的过程中的代码复用提供支持的开源框架,大量的机器人开源项目,从感知到控制、从定位到构图、从导航到可视化,几乎都使用ROS作为基础。
Micro-ROS从何而来?
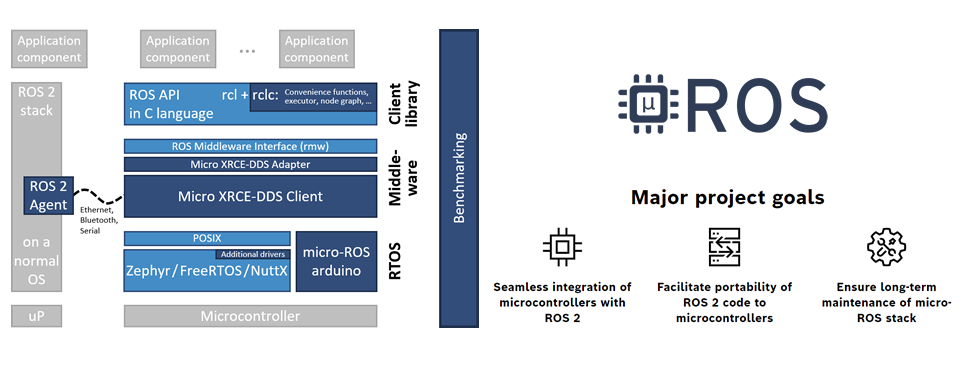
Micro-ROS实际上是从ROS2优化而来的轻量级ROS系统,用于在各种机器人应用中在MCU上实现第二代机器人操作系统ROS 2,通过使用通用框架,它可以实现与传统机器人、物联网传感器和设备的互操作性。ROS2基于ROS升级而来,如果说ROS为机器人研究和机器人原型开发提供了良好⽣态的话,那么ROS2就是⽤于机器人部署环境的开发架构和相应的工具链。
传统机器人ROS实质上是仍旧停留在MCU边界的,再通过串行协议或者旧版ROS中的工具与MCU集成在一起。Micro-ROS则允许在硬件级别附近运行ROS2节点,所有硬件外设都可用于该应用程序,从而使其能够直接与低级总线系统进行交互,亦与传感器和执行器接口互通。
(Micro-ROS,Micro-ROS开源社区)
ROS2解决了ROS在很多层面上无法满足的性能升级的短板,诸如:实时性、对MCU的支持、网络通信的依赖程度、多机器人的支持等等。原生的ROS其实只支持单个机器人,对于多机器人的支持是不足的,而且大型机器人项目的构建、开发和部署这些需求ROS逐渐不能满足。实时性、安全性、嵌⼊式移植等方面,在工业领域也让时常无法匹配某系性能的要求。
Micro-ROS在解决了多机器人支持、非理想网络环境支持、实时系统支持之外,最重要的就是对MCU直接的支持。Micro-ROS将不再停留在MCU的边界通过串行协议集成。ROS2采⽤RTSP(Real-Time Publish-Subscribe)协议的DDS作为中间层,DDS作为⼀种⽤于实时和嵌⼊式系统发布-订阅式通信的⼯业标准,在系统容错和灵活性上会更加完善。Micro-ROS同时可以利用其中间件可插拔性来使用针对MCU进行了优化的DDS-XRCE。
基于Micro-ROS的机器人控制MCU
Micro-ROS旨在将ROS2引入广泛的微控制器,主要目标就是中档32位微控制器系列。一般来说,Micro-ROS 需要具有几万字节RAM内存的MCU和能够实现Micro-ROS客户端到代理通信的通信外围设备。Micro-ROS支持的硬件目前分为官方支持的板和社区板。这里挑几个官方支持的Micro-ROS机器人本体控制MCU。
瑞萨RA6M5 Micro-ROS
瑞萨电子与Micro-ROS框架供应商eProsima合作,开发了基于RA6M5的ROS机器人本体控制器,将Micro-ROS完全集成到了EK RA6M5 MCU中。该系统能够基于ROS控制多个伺服系统。
(瑞萨)
32位的RA6M5 MCU是高性能Arm Cortex-M33内核,521KB内存,闪存高达2MB。集成了能够用于在ROS节点之间进行 Pub/Sub信息传递的通信接口,可以通过单线 UART 和 RS-485 控制多个伺服系统。该官方板支持的实时操作系统为FreeRTOS、ThreadX和裸机。
乐鑫ESP32 Micro-ROS
Xtensa双核32位LX6微处理器,最高240 MHz,520KB的内存以及高达4MB的闪存,在外设支持上是官方板中最多的,以太网 MAC、Wi-Fi 802.11 b/g/n、蓝牙 v4.2 BR/EDR、BLE、SPI、I2C、I2S、UART、SDIO、CAN、GPIO、ADC/DAC、PWM全部覆盖。对实时操作系统的支持目前仅支持应用最广泛的FreeRTOS。

(乐鑫)
STM32L4 Micro-ROS
ARM Cortex-M4的内核,128KB的内存,1MB的闪存,相当的朴实无华。但在机器人应用外设的集成上很亮眼,温湿度传感器、3轴IMU、ToF传感器等等。在社区自制的Micro-ROS
板上,ST的32位MCU仍然是最常见的,呈压倒性优势。
(ST)
Micro-ROS运用在MCU上的内存限制
在Micro-ROS与硬件结合上,还有一个问题,即在嵌入式平台中运行Micro-ROS的最大的制约来自于内存的限制。由于Micro-ROS 中的内存使用是一个很复杂的问题,所以如何调整Micro-ROS 中间件的内存消耗是比较棘手的。
因为Micro-ROS的目标是MCU这一类内存资源低的设备。优先使用静态内存而不是动态内存,并优化应用程序的内存占用是一个较为可行的办法。上面我们也提到了,Micro-ROS同时可以利用其中间件可插拔性来使用针对MCU进行了优化的DDS-XRCE。
Micro-ROS的中间件通常被形容成“资源极度受限但极度灵活”,为了与Micro-ROS堆栈中的ROS中间件接口集成,DDS-XRCE引入了静态内存池,以避免在运行时动态分配内存。这些都是为了消除Micro-ROS与硬件结合时的内存限制。解决这一限制后,Micro-ROS与MCU这类硬件的结合,可以说是相当可靠的机器人控制解决方案。
写在最后
“将ROS2放在MCU上”,这是Micro-ROS的社区宣言。纯硬件访问、低延迟的实时性、低功耗是Micro-ROS将ROS2放在MCU上的原因,Micro-ROS也的确开始在机器人应用中弥合资源受限的MCU和更强大的处理器之间的差距。
-
机器人
+关注
关注
211文章
28390浏览量
206957 -
ROS
+关注
关注
1文章
278浏览量
17004 -
机器人应用
+关注
关注
0文章
12浏览量
2159
发布评论请先 登录
相关推荐
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
如何在ROS中调用.so文件
ZMC900E控制器之ROS2环境安装指南

SLAMWARE ROS SDK的基础架构、部署方法和应用示例介绍

EtherCAT运动控制器在ROS上的应用开发案例(下)

EtherCAT运动控制器在ROS上的应用开发案例(上)

EtherCAT运动控制器在ROS上的应用(上)

系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
基于CubeMX的RT-thread Nano可以添加microros这样的软件包吗?
ROS系统的智能车开发-基于米尔芯驰MYD-JD9X开发板

ROS2 robot-localization配置方案
移动机器人与ROS操作系统原理与应用





 工商网监
工商网监
评论