 国产机器人主控芯片(二):高性能内核助力工业机器人协作升级
国产机器人主控芯片(二):高性能内核助力工业机器人协作升级
国产机器人主控芯片在“国产替代”的浪潮中以更低的价格和毫不逊色的性能逐渐取得了国内机器人厂商的青睐。这一期我们继续将目光聚焦在国产厂商,看看在机器人主控芯片国产替代浪潮中还有哪些不得不看的系列。
航顺HK32
航顺的产品组以ARM Cortex-M0/M3/M4为主,以M0、M3的主流型经济型产品居多。在高性能应用端,HK32F39A系列搭配协处理器在工业机器人应用上还是很好用的。

(图源:航顺)
HK32F39A系列使用高性能的ARM Cortex-M3内核,主频最高为120 MHz。但是这个系列远远不止M3内核的性能,HK32F39A系列内置了航顺自主研发的协处理器,可实现ARM Cortex-M4内核支持的算术指令中的绝大部分,其中包括32位单精度浮点运算,因此不妨把它当作M4内核的主控芯片来看。据悉与一些知名M4系列芯片相比,在同一软件同一主频下,相同的CoreMark测试跑分这个系列能跑很高的分数。
大存储外挂是这个系列的另一大特色,527 KB Flash、97 KB SRAM和512 Byte VBAT备份SRAM的容量已经不小,还可以通过FSMC模块外挂最多1 GB容量的外部静态存储器,这些外挂的大存储还是安全加密的。内核强劲,存储也有足够的空间似乎还不够,为了适配工业机器人应用,丰富的外设配置也不能少。
在片内interwetten与威廉的赔率体系 外设上,HK32F39A系列就配置了3个12位ADC、2个12位DAC以及1个温度传感器等等。针对电机控制与机器人应用, 还内置了2个高级16位定时器,一共8路PWM输出其中6路带死区互补,另外2个高级定时器与内置的4路电压比较器片内互连,能够极大节省电机中板级电压比较器及相关电路。
ChipON KF32
ChipON的产品组在电机控制上下了很大功夫,不管是对无感FOC的优化,还是为低主频的芯片加入运算硬件加速单元。精于控制的ChipON产品系列在应对机器人主控方面表现一直都不错。
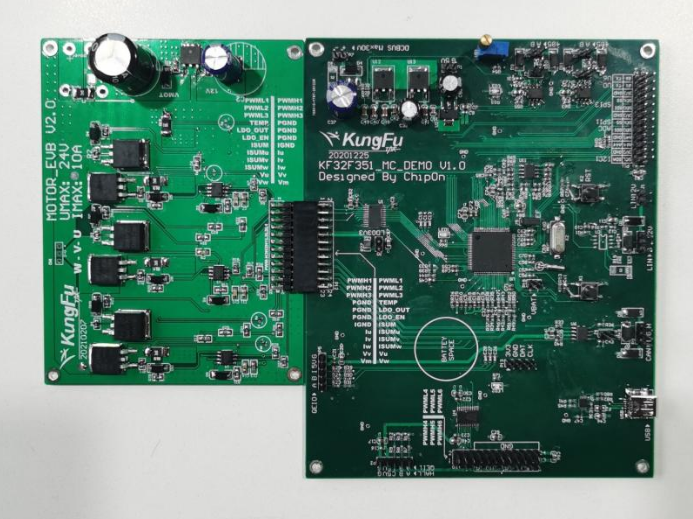
(图源:ChipON)
ChipON 32位混合指令集的自主IP内核系列,从48MHz到120MHz都能应用到工业机器人上。最高主频的KF32L530有基于16位/32位混合指令的高效指令集,最高拥有带ECC校验的512KB FLASH和128KB的RAM(支持RUN in RAM)。
强大的内核可以支持在没有任何硬件算法加速的情况下实现无感FOC大于240000RPM的电转速。同时,KF32L530可配置DSP核、协处理器以及FPU核,将运算能力推向极致。在解决算力要求后,KF32L530在PWM配置上也给出了最多2组的ECCP方案,16 bit PWM最高分辨率8.3ns(@120MHz)。最多2个独立ECCP模块,每个4x2通道,支持独立和互补输出拥有3+1个独立死区补偿。KF32L530还能配置最多3个独立ADC,在丰富的ADC触发采样功能基础上,额外再提供2个独立的ADC触发采样时间寄存器。
除了对控制的细心打磨,KF32L530提供了大量的通信接口,包括CAN、LIN、SPI、I2C、USART和EXIC,所以不用担心在复杂工业通信场景的应用。
极海半导体APM32F
APM32工业级芯片的高ESD等级和高温度覆盖范围一直是其特长,8KV的抗干扰能力能够大幅提高电机系统的静电防护能力。

(图源:极海)
APM32应用在机器人关节伺服系统最多的是APM32F407系列。APM32F407系列基于ARM Cortex-M4内核,可以支持单精度FPU和增强型DSP处理指令。主频最高168MHz,拥有1MB的FLASH和192的SRAM,同样支持外部存储器拓展。
APM32F407系列微控制器实现了一个特殊的机制,就是可以通过配置BOOT[1:0]引脚实现三种不同的启动模式,系统不仅仅可以从Flash存储器或系统存储器启动,还可以从内置SRAM启动,被选作启动区域的存储器是由选择的启动模式决定。
基于APM32F407系列给出的机器人伺服方案可以将电机、驱动器和减速机进行一体化设计,这样功率密度会比分立式更高;APM32F407系列除了内核拥有DSP和FPU高性能处理能力,还给出了支持SDRAM等多种外设接口,对于工业机器人丰富的外设完成覆盖;为了将位置控制做到更精确,磁性编码器代替了光电编码器实现位置反馈;最后一点则是使用了CAN总线实现电机控制指令传输,兼顾稳定和高效率。
小结
在小型的工业机器人中,如果主控芯片只需要完成关节的控制不涉及复杂的高算力应用,机器人厂商为了摊薄成本选择ARM Cortex-M0内核为主控芯片就足矣。但随着工业机器人的发展,更复杂的感知侧执行侧要求主控芯片性能越来越高,各个半导体厂商也相继推出M4、M7内核的机器人芯片以适应机器人智能化发展。
-
机器人
+关注
关注
211文章
28388浏览量
206921 -
工业机器人
+关注
关注
91文章
3361浏览量
92624
发布评论请先 登录
相关推荐
MiR推出MC600移动协作机器人
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
PCB行业:用协作机器人,就选大族机器人
什么是协作机器人?为什么使用协作机器人?





 工商网监
工商网监
评论