 机器人IMU:补足导航欠缺,辅助机器运动
机器人IMU:补足导航欠缺,辅助机器运动
从扫地机器人到物流机器人到工业搬运机器人,这些都可以算作移动机器人范畴。随着移动机器人的普及,大家也对它们的出现已经习以为常了。我们常见的这些移动机器人都属于轮式机器人,虽然它们有着各种各样的底盘,但归根结底它们的移动都需要靠底盘上的车轮来interwetten与威廉的赔率体系
人的移动。
两轮差速底盘应该是现在应用最多的移动底盘,两个驱动轮带一个从动万向轮,靠差速转弯。扫地机器人以及绝大部分物流AMR都选择了这种移动底盘。尤其是AMR,作为自主导航机器人,机器必须实时知晓自己的位置。在移动机器人测算自己位置的时候,离不开绝对角度这个值,这个值是由IMU提供的。可以说机器人整体里程计的精度,也就是机器人的”位置感”,和IMU有着莫大的关系。
融合IMU成了视觉SLAM方案和激光SLAM方案补足自身导航方案缺点的有效手段。IMU发展至今也将加速度传感器、陀螺仪、磁传感器等MEMS器件集成在一起,以更小的体积、更低的成本来辅助机器运动。本期将挑选机器人应用向性能顶尖的IMU看看它们做到了什么样的层次。
ADIS16486完整惯性系统
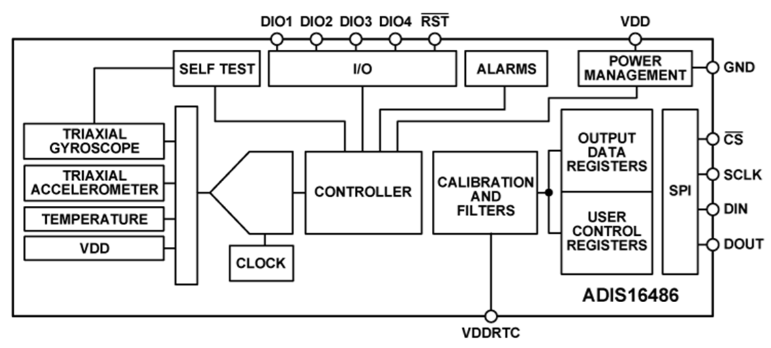
(ADI)
ADIS16486内置了一个三轴陀螺仪和一个三轴加速计,针对各传感器的灵敏度、偏置、对准和线性加速度都进行了校准。可以说每个传感器都配有动态补偿公式,提供精确的传感器测量。
内置的三轴陀螺仪最重要的灵敏度误差,仅有±0.5%,这是最关键的指标。动态范围为±450°/s,轴间错位误差为±0.018°,运行偏置的稳定性为5.3°/h,FS非线性度仅为0.01%。三轴陀螺仪的精度参数值都是很高的精度水平而且噪声密度极低。同时三轴数字加速计的动态范围也在±18g左右。在保证三轴的精度同时,还有着角度增量输出和速度增量输出。严格的正交对准可简化导航系统中的惯性坐标系对准。
该惯性系统可以承受最大2000g的机械冲击,串行外设接口和寄存器结构针对数据收集和配置控制提供简单的接口。这种完整的系统设计比起复杂且昂贵的分立设计,可以说是既简单又高效。这系列可以很好的适配各类移动机器人导航系统。
ICM-42688-P IMU单元
(TDK)
这款6轴MEMS运动传感器,在性能上是绝对的行业领先。它的噪声、灵敏度以及随时间和温度变化的偏置稳定性都处于很高的行业水平。其中的陀螺仪,最关键的灵敏度误差,依然是±0.5%这个绝对领先的数值。在零速率偏移量上,可以做到±0.5dps这种车载水平。而在机器人应用中绝对重要的噪声密度,为0.0028dps/√Hz,低密度的噪声让机器人更容易获取自己的位置信息。
加速度计同样是±0.5%的灵敏度误差以及车载水平的±40mg零加速度偏移量。噪声密度为75dps/√Hz。该IMU配合TDK旗下的RoboVac可以进一步提高应用程序性能的独特功能,如与RTC同步的样本,20位的ADC,32kHz的ODR。
这个系列还有一个更直接的优势,功耗低。在低噪声模式下的A+G为880µA;在低功率模式下的A小于50µA。对于移动机器人这类中小型机器人,低功耗器件往往是厂商的第一选择。
ISM330DHCX iNEMO惯性模块
之所以叫做iNEMO惯性模块,是因为ST在IMU内整合了补充类型的传感器,提供了比分立式MEMS产品更小巧、稳定且易于组装的惯性模块。整合的器件包括加速计,陀螺仪以及磁力计。

(ST)
ISM330DHCX的传感元件采用专门的MEMS工艺制造,IC接口则采用CMOS威廉希尔官方网站
开发,与传感元件有很好的匹配度。在ISM330DHCX中不同于其他设计的是加速度计和陀螺仪的传感元件在同一个硅芯片上,这种设计最直接的效果就是提升了器件的稳定性和鲁棒性。
ISM330DHCX的满标度加速度范围为±2/±4/±8/±16 g,角速率范围为±125/±250/±500/±1000/±2000/±4000 dps覆盖范围很广,不仅适用于机器人应用,对于绝大部分工业应用都有覆盖。虽然该模块是泛工业应用器件,不是专门针对机器人应用推出的,但是它在整体设计有无可争议的优异性能,以及完善的配套可以完美契合移动机器人应用。
首先为了在系统层面进一步节电,iNEMO 惯性模块内嵌机器学习内核。MLC运行一个传感器内置的分类引擎,卸载主处理器的负荷以运行不同的任务,同时内置的传感器可以识别运动数据。另外多个传感器输出的集成令运动传感系统的精度很高,在机器室内导航应用上能很好的弥补V-SLAM和激光SLAM的缺陷。
小结
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
移动机器人
+关注
关注
2文章
762浏览量
33572 -
IMU
+关注
关注
6文章
312浏览量
45749
发布评论请先 登录
相关推荐
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
关键路径:利用GNSS和IMU等传感器直接获取位置信息,同时通过摄像头、激光雷达获取环境距离信息反向推算位置。在数据处理环节,采用卡尔曼滤波器和最大后验估计方法融合多传感器数据,优化机器人位置和运动状态
发表于 12-19 22:26
工业机器人常用的编程方式
机器人完成特定的任务。编程可以手动完成,也可以通过计算机辅助设计(CAD)软件自动生成。编程方式的选择取决于任务的复杂性、机器人的类型、以及所需的灵活性和效率。 1. 手动编程 1.1 示教编程 直接示教 :操作员直接控制
柔性机器人与刚性机器人区别与联系
、伸缩和变形。其结构通常模仿生物体的柔性和弹性特征。 刚性机器人:由刚性材料(如金属、硬质塑料等)制成,具有固定形状和结构,无法轻易变形。 2.运动方式 柔性机器人:通过柔性驱动(如气动、液压、形状记忆合金等)实现复杂的

导远IMU赋能机器人落地
在人工智能和大模型的推动下,机器人威廉希尔官方网站
正以前所未有的速度演进,将科幻电影中的美好幻想逐步变为现实。而这一切,都离不开一项关键传感器——惯性测量单元(IMU)。
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
自动停车机器人,如何快速构建?
现场作业 ▲停车移动机器人构成 科聪停车机器人 解决方案 -KC SOLUTION 本方案中核心部分采用的是科聪通用移动机器人控制器,导航方式一般选择激光

abb工业机器人的运动模式有哪些
ABB工业机器人的运动模式是其在自动化生产线上执行任务的关键因素之一。本文将详细介绍ABB工业机器人的多种运动模式,以及它们在实际应用中的优势和局限性。 一、基本
ABB工业机器人运动指令有哪几个
ABB工业机器人是一种广泛应用于制造业、物流、医疗等领域的自动化设备。其运动指令是实现机器人精确控制的关键。以下是对ABB工业机器人运动指令
运动控制和机器人系统有什么区别
在自动化和机器人威廉希尔官方网站
日益发展的今天,运动控制和机器人系统是两个经常被提及的概念。虽然它们都在自动化领域扮演着重要角色,但运动控制和机器人系统
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
研发的六自由度串联机器人进行实际的运动控制实验。实验证明,机器人可以实时地跟随屏幕上显示的物块运动。
主要创新点
本设计难点在于如何提高视觉检测的实时性和
发表于 05-29 16:17
其利天下威廉希尔官方网站 ·搭载无刷电机的扫地机器人的前景如何?
已经取得了显著的进步,但在威廉希尔官方网站
层面仍存在一些壁垒需要突破。首先,机器人的导航和定位威廉希尔官方网站
仍有提升空间,特别是在复杂家居环境中的精准导航和避障能力还需加强。其次,扫地机器人的电池续航能力也
发表于 05-05 15:03
机器人运动学中的非完整约束与运动模型推导
机器人运动学中的运动学约束是指机器人在运动过程中受到的限制,包括位置、姿态、速度和加速度等因素。这些约束会对机器人的自由度产生影响,从而影响






 工商网监
工商网监
评论