 四维图新王鹏:高精度地图在自动驾驶中的作用与发展趋势
四维图新王鹏:高精度地图在自动驾驶中的作用与发展趋势
7月31日,在2021第十二届高工智能汽车开发者大会上,四维图新地图云解决方案架构师 王鹏发表演讲,和与会嘉宾、行业专家探讨了高精度地图在自动驾驶中的作用与发展趋势,并分享了四维图新在这一领域的产品布局和思考。
以下为演讲部分实录
感谢高工智能的邀请,今天希望能分享一些干货给大家,希望大家能从中受益。前面我听了各位专家的分享,从芯片到域控,从感知的算法到基础的一些架构。那么到了高精地图,该怎么形容高精地图在自动驾驶中的作用呢?我认为高精地图对于自动驾驶的意义相当于记忆之于人的意义,人在驾驶过程中,在做出决策之前,要依赖于之前的知识和经验去推动决策制定及规划控制,而高精地图在整个自动驾驶中,就像这样一个先验知识的记忆。
一、汽车智能化发展趋势以及对高精地图的行业需求
从国家层面来说,引导电动化、网联化和智能化发展是毋庸置疑的,其中智能化是我们今后几年重点加码的主战场。现在大家可以感觉到对于推进L3、L4遇到一些困难,包括遇到威廉希尔官方网站 和政策法规等多方面的难点,所以市场现在主要的策略是从L2及L2+开始逐渐的推进自动驾驶落地。
从趋势来看,目前主要还是会从高速和封闭道路的场景开始,道路参与者比较简单,比城市工况要更易落地。至于城市工况,因为道路情况相对比较复杂,特别是中国的路况,所以在它之前,大家把AVP的场景落地作为现在的一个发力点。从2026年到2030年,城市工况的自动驾驶可能才会开始逐步落地。
从业态和发展模式来看,大家能感受到车端的数据量与算力需求越来越大,完全通过车端来处理我们自动驾驶相关的应用是比较难的,所以我国的路径是单车智能+车路协同,推进人、车、路、云高效协同的解决方案,所以不论是推进V2X、智能道路的搭建和验证,还是推进智能位置云端的服务的支持,都是必要的。
在智能汽车发展的这一大趋势背景下,高精度地图能扮演怎样的角色、发挥怎样的作用呢?
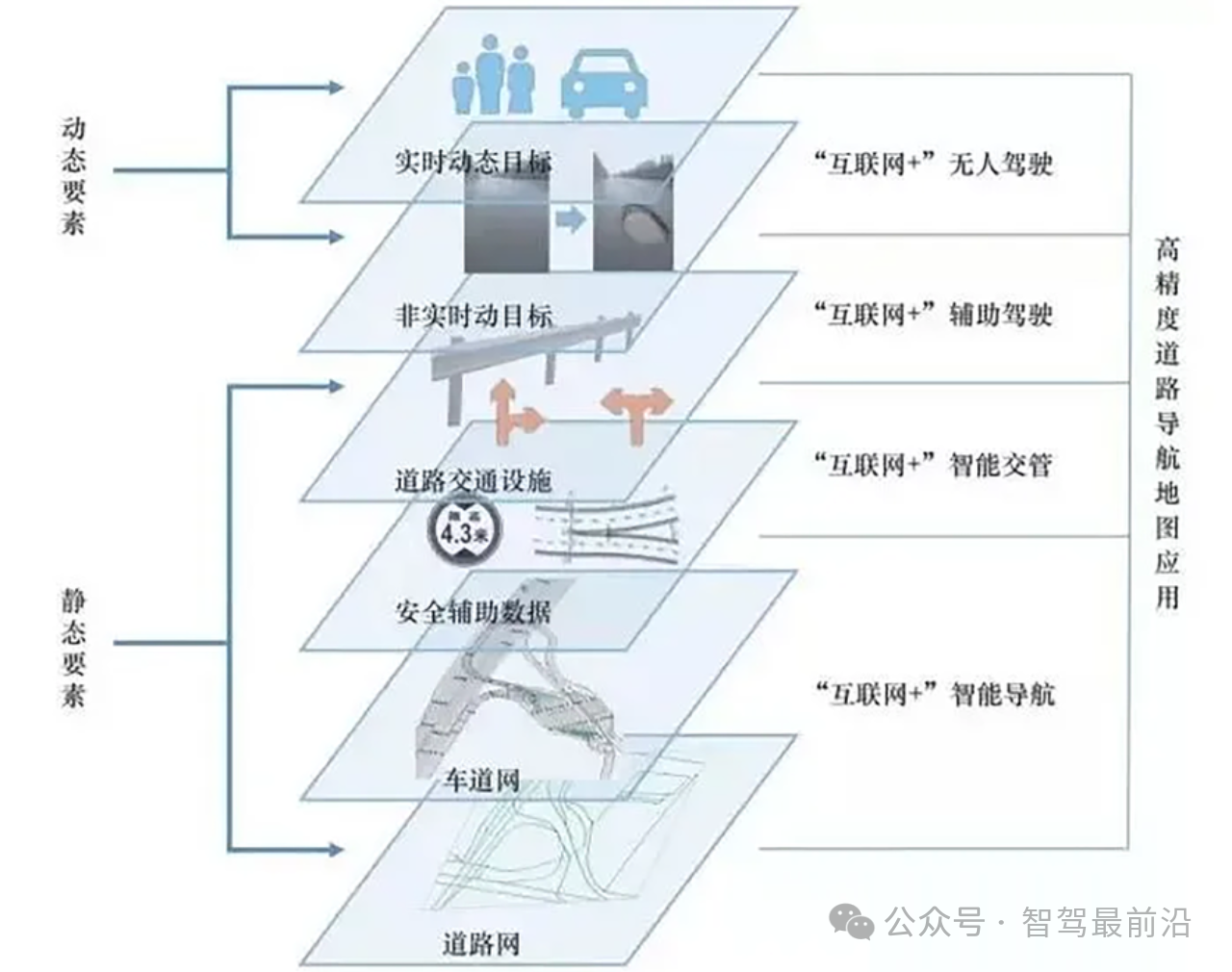
高精地图的核心作用最主要就是以下四点,一是去做感知的辅助,像图上这些特殊的场景:特殊天气,遮蔽,系统没有正确的感知到结果,都可能会造成安全隐患,而这些需要感知的信息都是高精地图可以精准表达的。
其次一点是帮助自动驾驶车辆去做定位,而且这个定位是高精的定位结果,L2+以上的自动驾驶对定位结果的精度、稳定度要求是非常高的,地图加车辆感知的结果可以做高精度融合定位,在多场景下均可最终输出亚米级或者是厘米级的定位结果。
另外,不论是自适应巡航ACC,还是已经落地的基于导航的领航辅助驾驶,可能都需要导航结果做自动变道等车道级的规划和引导支持,这也是离不开高精地图的,什么地方可以允许变道,最佳变道的路线怎么选择,需要结合高精地图和动态感知结果来实现。
最后就是差异化的驾驶规则的决策,这一部分主要是城市路况相关应用,包括大家比较常见的如十字路口,路口的难点在于哪里呢?自动驾驶车辆控制主要依赖车道线信息,所以目前很重要的感知能力就是车道线识别,但是在十字路口本身没有车道线,这会使算法的计算维度和难度大幅提升。而根据高精度地图中的虚拟车道线属性要素,以及车道和车道之间的挂接关系,来辅助自动驾驶,就能很好的解决这一场景的难点。环岛的形式也是类似,本身自动驾驶感知的视角没有办法环视整个环岛的全景,高精地图可以为自动驾驶系统提供上帝视角,提前作出合理的驾驶规划,保证驾驶安全。
在目前整体的自动驾驶点到点的应用过程中,从一开始的主动召唤,到十字路口、环岛,上下匝道以及之后的高速自动驾驶,到最后的自动泊车,这些都有相关的对应的地图产品支持,大幅提升自动驾驶能力与量产可能。
说到高精度地图产品,下面我会主要介绍一下四维图新的布局。
二、四维图新高精地图产品介绍
首先在产品策略上,我们认为高精地图不可能是铺设不同的产线、给用户不同的规格,这样会造成一个什么情况呢?如果现在产品场景是基于高速的,未来还有普通路,结果普通路的数据需要新的规格和格式,硬件整个架构不能复用,这对车厂来说是不可接受的。所以我们需要有从L2到L4的统一的道路结构数据规格,做到数据的无缝的OTA。
产品架构上,从生产体系的工具链搭建,以及要素的规划,都需要考虑到成本因素,替客户考虑成本,生产线是不是可以复用,我们整个的产品线能不能合到一起做处理升级。
第三部分就是数据的品质,四维图新是国内率先布局L3级自动驾驶高精度地图量产项目的厂商,客户对于产品品质要求相对来说是比较高的,我们率先通过客户认可的达到ASIL-B要求的质量,同时高精度地图也是全球首个也是迄今唯一的通过ASPICECL3国际标准认证的产品。
面向量产,一个重要问题是在数据全域覆盖之后,更新怎么去做,这需要和合作伙伴一起做UGC数据更新,这里重点要考虑合法合规,在保障数据安全与网络安全的基础上做探索,我们也在和国家有关部门积极推进,未来肯定会有一个成熟的方案。
面向高精度地图应用,四维图新搭建了整体的解决方案服务框架,一部分是车端应用能力一部分是云端服务能力。
在车端,除了高精度地图数据,我们也有一站式高精度地图应用产品赋能车厂应用,包括动静态感知、融合定位算法、车道级路径规划以及ODD判断等。
在云端,会有地图的UGC数据更新处理、地图数据分发,帮助OEM厂商去快速的落地自动驾驶项目。
三、未来挑战
未来的无人驾驶,不是依赖于单车传感器就能够做到的,一方面要看传感器升级、算法的升级,同时也要倚仗V2X威廉希尔官方网站 、大数据、边缘计算、云计算以及5G的普及,而高精度地图不仅是智能汽车的核心模块,也是参与路侧交通基础设施智慧化建设必不可少的支撑,以高精度动态地图连接车厂和路侧基础设施方,服务于车路协同自动驾驶、智能网联、智慧交通等领域,为车厂、企业、政府等不同行业客户提供定制化的应用服务,推动自动驾驶的快速落地。
编辑:jq
-
OEM
+关注
关注
4文章
402浏览量
50349 -
导航
+关注
关注
7文章
528浏览量
42411 -
智能汽车
+关注
关注
30文章
2851浏览量
107269 -
自动驾驶
+关注
关注
784文章
13809浏览量
166442 -
UGC
+关注
关注
0文章
6浏览量
7609
原文标题:干货分享:高精度地图在未来自动驾驶中的作用与发展趋势
文章出处:【微信号:ouster_tribe,微信公众号:OUSTER】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
四维图新智能驾驶产品出货量突破百万
智能驾驶威廉希尔官方网站 发展趋势
从小鹏、理想、蔚来布局看自动驾驶发展趋势
四维图新接盘滴滴智驾及座舱资产
自动驾驶无图方案真的可行吗?
四维图新子公司联合中标2.5亿元自动驾驶相关项目
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
抛弃高精度地图旧模式,走向视觉感知新时代?
四维图新自动驾驶项目通过ASPICE CL2级认证
四维图新战略项目通过ASPICE CL2级认证
四维图新专家携轻量化地图解决方案参与城市NOA发展趋势分享

自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案






 工商网监
工商网监
评论