 CEVA发布室内机器人导航系统高精度航位推算软件解决方案
CEVA发布室内机器人导航系统高精度航位推算软件解决方案
功能强大且精确的航位推算软件通过融合来自光学传感器、IMU传感器和轮速传感器的传感器数据,提供了可替代基于昂贵摄像头或LIDAR系统的低成本方案,用于室内机器人导航。
CEVA,全球领先的无线连接和智能传感威廉希尔官方网站 的授权许可厂商(NASDAQ:CEVA)发布一款用于室内机器人智能导航系统的高精度航位推算软件解决方案Hillcrest Labs MotionEngine Scout,适合工业或商业环境中使用的机器人清洁器和自主移动机器人(AMR)。
市场研究机构ABI Research预计室内自主机器人行业在未来五年的复合年增长率(CAGR)达到20%。MotionEngine Scout使能室内自主机器人智能导航,无需昂贵的摄像头或LiDAR即可实现精确定位,它是与传感器和处理器无关的嵌入式软件解决方案,融合了机器人的光流传感器、轮速传感器和惯性测量单元(IMU)获得的测量结果,并且使用这些数据提供更好的航位推算精度和鲁棒性(纠正单个传感器错误)。作为例证,MotionEngine Scout在具有挑战性的场景中(包括乙烯基、瓷砖和各种样式的地毯等地面)将轨迹误差降低了五倍。
CEVA副总裁兼传感器融合业务部门总经理Chad Lucien表示:“我们开发MotionEngine Scout以减低OEM厂商自行开发室内自动机器人所面对的成本和威廉希尔官方网站 壁垒。我们在机器人导航、传感器融合、校准和传感器分析方面拥有丰富的经验,因而能够提供一款高精度的航位推算软件解决方案,以增强或替代基于摄像头或LiDAR的系统。MotionEngine Scout为开发新型室内机器人打好基础,这些机器人能够实现环境智能导航,并且使得OEM厂商能够降低成本以满足最终用户对价位的要求。”
对于机器人OEM厂商而言,MotionEngine Scout简化并加速集成工作,它提供单一软件包与IMU、光流传感器和轮速传感器接口,并集成传感器输出提供统一的机器人姿势(包括3D空间中的位置和方向)。MotionEngine Scout支持STMicroelectronics、Bosch-Sensortec和TDK InvenSense等领先供应商提供的各种商用IMU传感器,为OEM厂商提供供应链灵活性,从而减少供应短缺风险,并且提供了成本和性能权衡折衷的选择。对于不可或缺的光流传感器,CEVA与PixArt合作将其PAA5101dual-light光学跟踪传感器整合到解决方案中,从而进一步降低了开发工作的复杂性并缩短了上市时间。
PixArt Imaging USA战略营销总监Charles Chong评论道:“CEVA用于室内机器人导航的独特传感器融合威廉希尔官方网站 与我们的光学跟踪传感器专业知识相辅相成,我们很高兴与CEVA合作开发这一利润丰厚且不断增长的市场。我们的PAA5101传感器和MotionEngine Scout软件相结合,可提供功能强大的高性能解决方案,而无需定制传感器或镜头,从而削减了总体物料清单成本并简化了设计工作。”
MotionEngine Scout扩展了CEVA用于自主室内机器人的传感器产品线,该产品线包括以下基于IMU的解决方案:MotionEngine Robotics软件、FSP200传感器中枢、BNO086系统级封装和FSM300模块。CEVA还提供自主机器人所需的其他IP产品,包括用于连接的RivieraWaves蓝牙和Wi-Fi平台以及能够处理来自摄像头、LiDAR、IMU等传感器的多个传感器处理工作负荷的SensPro2传感器中枢DSP。
原文标题:CEVA发布适用于室内自主机器人的 高精度航位推算软件解决方案MotionEngine™ Scout
文章出处:【微信公众号:CEVA】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
传感器
+关注
关注
2551文章
51084浏览量
753433 -
机器人
+关注
关注
211文章
28414浏览量
207052
原文标题:CEVA发布适用于室内自主机器人的 高精度航位推算软件解决方案MotionEngine™ Scout
文章出处:【微信号:CEVA-IP,微信公众号:CEVA】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
移远通信发布高精度GNSS模组LG580P
移远通信推出全星系多频段高精度定位定向GNSS模组LG580P,引领高精度导航新时代

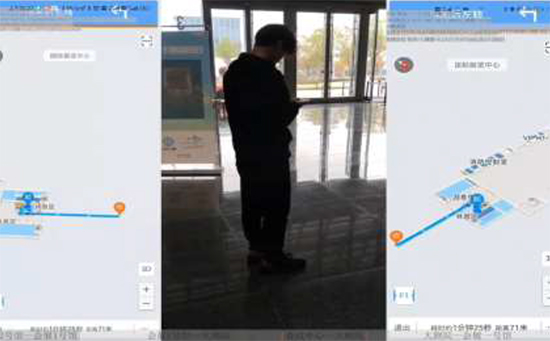
室内人行与导航系统有哪些多样化的功能?
基于ST第五代高精度定位芯片的车载定位P-BOX方案

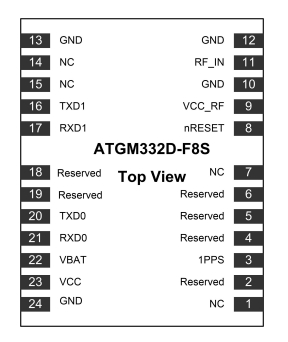
ATGM332D-F8S单北斗多频车载航位推算模块功能与应用选型

安防巡检机器人:守护安全的智能卫士

智慧仓储高精度室内定位解决方案介绍

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
自动停车机器人,如何快速构建?

新品 | Bumblebee X系列用于高精度机器人应用的新型立体视觉产品

Teledyne FLIR IIS推出一款用于高精度机器人的新型立体视觉产品
毫米波雷达模块驱动下的室内定位与导航系统性能评估
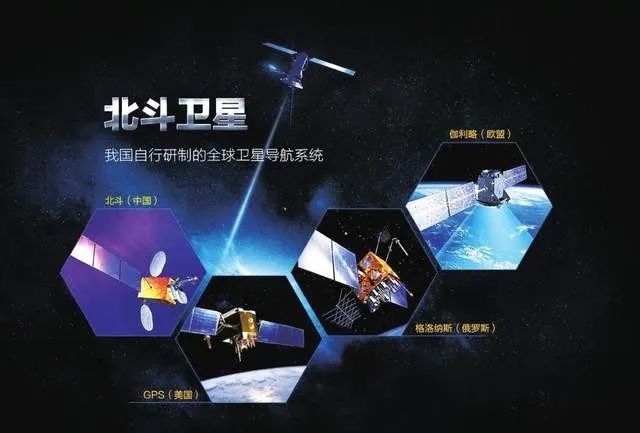
北斗三号卫星导航系统采用了哪些先进威廉希尔官方网站 ,你知道吗?





 工商网监
工商网监
评论