 机器人手指关节用的是哪一种微型电机
机器人手指关节用的是哪一种微型电机
随着各式各样的微型智能机器人走进人们的生活中,微型电机的应用越来越广泛,微型智能机器人的各种动作都是通过微型电机旋转来驱动实现的。那么微型智能机器人手指关节用什么样的微型电机呢?
机器人手指运动是比较复杂的,使用性能较差的微电机会导致机器人手指灵活性差、力度控制精度不高等,无法满足手指关节运动的要求,应选用体积小、扭力大、抗干扰的微电机。
目前国际上常见:拉钢线、舵机、无刷电机加蜗轮蜗杆结构、步进电机加蜗轮蜗杆结构、气动方案作为机器人手指方案,这些方案普遍存在噪音、精度不准、体积大、堵转烧机、断电失效等情况。
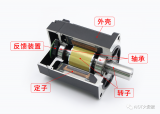
超声电机作为核心驱动部件作为机器人手指关节部件,可以做到静音、高精度、体积小、堵转不烧机、断电自锁等功能。
超声电机作为核心驱动部件作为机器人手指,可使得机器人手指外观及性能更趋于完美。
fqj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28398浏览量
206988 -
电机
+关注
关注
142文章
9010浏览量
145406
发布评论请先 登录
相关推荐
多关节机器人驱控一体机QC-R6M
同步性高、响应更快、控制精度更高 QC-R6M是华成工控针对多关节机器人推出的新一代板卡级驱控一体控制系统,采用FPGA伺服控制系统,体积更小,集成度更高。内置6路抱闸控制,支持6个轴

泰科机器人获奖,开启人形机器人关节模组新动力
机器人多角度展现人形机器人关节模组、手臂等最新成果,引来众多本体厂商、投资机构及上游供应商的驻足观看和探讨。

伺服电机在机器人中的应用有哪些
伺服电机作为现代工业自动化领域的核心组件,其精确控制和高效性能在机器人威廉希尔官方网站
中扮演着至关重要的角色。 伺服电机的工作原理 伺服电机是一种能够将
机器人关节模组为何选择双编码器设计?
关节模组是机器人关节控制系统中的核心组件,决定了机器人的运动控制与动作精准度。在关节模组中,位置反馈和误差校正是确保精确运动的关键,而双编码

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!
为满足新老客户在定制人形机器人一体化关节时的最新需求,泰科机器人在结构设计、材料选择和定制化开发等方面不断推出创新方案,产品全系可覆盖人形机器人



锂离子超级电容器跟超级电容器哪一种更加好?
锂离子超级电容器和普通超级电容器各有其优势和特点,具体哪一种更好取决于应用场景和需求。一般来说,锂离子超级电容器结合了锂离子电池和超级电容器的优点,具有高能量密度和高功率密度的特点,同时具备较长

步进电机在工业机器人中的应用
随着工业4.0时代的到来,工业机器人已成为现代工业生产线上的重要组成部分。作为工业机器人的核心驱动装置,电机威廉希尔官方网站
的发展直接影响到工业机器人的性能和效率。步进
泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展
作为开年第一大展,ITES深圳工业展于3月28-31日,在深圳宝安国际会展中心成功举办,泰科机器人携人形机器人关节模组新品、智能分拣搬运、双臂协作试剂开拧瓶盖、移液、臂展1米8的大负载


线性稳压电源和开关电源哪一种更好呢?
线性稳压电源和开关电源哪一种更好呢? 线性稳压电源和开关电源是两种不同类型的电源威廉希尔官方网站
,它们在性能、工作原理和应用领域上存在着差异。在选择哪种电源更好时,需要考虑各自的优点和缺点,并根据实际需求做出
无框电机最适合哪种应用?为什么机器人关节要用无框力矩电机?
机器人关节要求电机体积小、扭矩大、响应快。而无框力矩电机仅由转子和定子组成,体积小,同时具有较高的功率,低转速情况下能够输出更大扭矩,更符合人形机器
发表于 01-02 13:41
•4200次阅读





 工商网监
工商网监
评论