 基于DSP芯片TMS320DM642实现剖面声纳系统的设计
基于DSP芯片TMS320DM642实现剖面声纳系统的设计
作者:王继胜,郭元曦,徐小卡,王海峰
随着声纳威廉希尔官方网站 的发展,对于声纳信号处理系统的信号处理能力也提出了越来越高的要求。传统的主动声纳信号处理系统大多采用专用的硬件结构来完成特定的数据处理任务,即换能器后端直接接入数据转换采集器,所采集的数据经模数转换后送入数字信号处理器进行处理。此类系统只适用于固定的换能器基阵或者固定的处理速度,一旦换能器基阵变化或者处理速度要求更高,系统就无能为力了。针对以上的局限性和实际项目要求多波束剖面声纳小体积系统,设计并实现了一种基于IP网络互连的、可扩展的多波束剖面声纳并行处理系统。该系统采用二片TI公司高性能网络多媒体处理器TMS320DM642组成的板上流水线并行结构作为一个处理节点,并借助IP网络实现板间互连并行处理,可根据换能器阵元和处理速度的要求适当增减处理节点的数目,由于各处理节点独立存储,融合数据上传,非常适合搭载于小平台的主动声纳信号处理。应用于海底石油管线探测与定位的多波束剖面声纳系统,能够以每秒10帧或者更高的速度完成海底石油管线探测与显示。剖面声纳系统的每个处理节点与数据采集转换部分采用TCP/IP网络连接,可以通过物理上添加一个或多个处理节点,成倍地提高系统的信号处理能力。
1 剖面声纳系统工作原理及结构
1.1 剖面声纳工作原理
剖面声纳工作在主动方式时,发射换能器垂直于被测海底发射一束圆锥形波束,声波到达海底表面时,一部分能量被反射回来,产生一个很强的回波,另一部分能量透射进入海底内部,在海底内部继续向深处传播。由于海底内部介质不连续(如海底的岩石、石油管线等),各介质产生的回波能量,一部分被固体物质散射而损耗,另一部分则反向散射回换能器,这部分回波包含了海底内部介质的不连续信息。因而可以根据海底介质的内部回波很好地反映出海底内部掩埋物体分布情况。根据机器人载体平行于海底运动,换能器所接收的信号经过接收机的处理传输到水上主机重建出海底内部剖面的二维结构图,再根据机器人的测高、测距及定位声纳及后续处理便得到被测区域的三维剖面图。
1.2 剖面声纳的系统结构
用于海底石油管线探测的多波束剖面声纳系统,既可以安装在机器人的底部,也可以悬挂于机器人的前端,具有灵活安装的特点。
根据系统实时性和准确性的考虑,将系统分为水下和水上两个单元,中间用光缆连接。水下单元位于机器人ROV载体上,包括水下控制处理舱和换能器基阵两个部分。水下控制处理舱主要包括DSP控制发射部分、发射机以及DSP并行处理部分;换能器基阵主要包括由宽带大功率阵子组成的呈45°×5°指向性的发射换能器和具有9个阵元、每个阵元呈5°指向性的接收换能器,其中,接收换能器内部含有interwetten与威廉的赔率体系 信号调理电路板,能够将换能器的模拟信号实时地转换成数字信号并通过IP网络实时传输到水下控制处理舱的DSP并行处理单元进行相关的信号处理。水上单元主要由水上主机构成,利用其串口实时控制发射信号的功率、发射帧率、采集时刻等,通过网卡接收水下单元DSP处理数据并通过VC++显示程序进行剖面结构信息的实时显示。剖面声纳系统结构图如图1所示。
接收换能器部分负责将接收换能器接收的模拟信号进行信号调理,包括放大、滤波、自动增益控制(AGC),并按照500kHz采样率转换成数字信号,然后通过网络传输到水下控制处理舱的DSP并行处理单元。该部分采用网络数据传输是因为:一方面由于网络物理层数据传输速度快,可以满足9路A/D的500kHz采样率及16bit的数据输出,使数据的传输与模拟信号的采集同步;另一方面,采用IP网络互连既可以实现点对点的连接,也可以实现一点发送多点接收。这样就可以实现主动声纳的分帧处理,即利用一个接收点处理一定帧的数据量,利用多个接收点处理一批帧的数据量,从而提高了系统的整体处理速度,使系统以更高的刷新帧率进行剖面结构的显示。
2 基于IP互连的DSP并行处理结构
2.1 流水线并行的DSP处理板结构
多波束剖面声纳系统采用35k~65kHz宽带线形调频信号进行探测,系统的采样频率为500kHz,接收9路的基阵信号,并且要求系统具有较高的探测能力,所以采集时间定为15ms以上,探测有效距离大于11米。进行海底的剖面探测时,需要对接收的多波束接收信号进行带内补偿、波束形成、频域相关算法、旁瓣抑制以及FIR滤波等处理,系统要求能够在10帧/秒以上实时显示剖面结果并且存盘。
为了满足多波束剖面声纳的高速、大容量数据的实时信号处理需求,在信号处理系统部分采用了以二片DSP TMS320DM642组成的流水线并行结构,如图2所示。
TMS320DM642是TI公司2004年推出的多媒体处理器,具有最高720MHz的主频,单片峰值处理能力为5 760MIPS,而且该芯片具有10M/100M以太网接口,可以方便地实现处理板间的网络数据互连,从而可以实现系统的并行数据处理。
图2中,左端DSP为从DSP,通过其自身网口与接收换能器内的数据转换网络连接,根据显示速度要求,接收转换后的信号数据,并存储到其外围的SDRAM中。当接收到一帧信号数据时转入并行处理程序,左右两片DSP采用流水线并行处理方式。
并行处理时左端DSP负责接收数据,右端主DSP通过HPI接口读取左端DSP的内部数据及外部SDRAM的数据,同时左右两端的DSP通过双端口FIFO进行数据交换、邮箱信息传递等。为了保证信号处理时左右两端DSP的负载平衡,系统将剖面声纳系统需要处理的任务进行划分:多波束剖面声纳信号处理需要将9路波束数据(每路7 500点16bit)进行FFT、频域波束形成、频域相关算法、IFFT、时域FIR滤波、时域加权压制旁瓣等算法处理。如果TI DSP所采用的指令,其“取指”、“分析”、“执行”三大操作步骤采用流水线工作流程,则可以利用多个任务在时间上相互错开,轮流重叠地使用同一套设备上的不同运算单元,来加快系统的计算速度,流水线的并行执行大大降低了整个系统任务的执行时间。为了保证两个DSP的负载平衡,使系统工作时流水线并行处理板能够真正地以流水线的形式并行处理剖面的数据,将每块并行处理板内任务进行了划分。系统单个DSP负载的划分如图3所示。
以1秒钟单板实现5帧数据显示为例,将系统任务细分成时间相等的几个子过程,分配给处理板各个部件流水执行。流水线的最大吞吐率取决于子过程所经过的时间,该时间越小,流水线的最大吞吐率越高。系统流水处理的时间-空间图如图4所示。
2.2 板间基于IP互连的并行处理
基于IP网路互连通路,本文设计了板间的基于IP互连的并行处理结构。
多波束剖面声纳系统的每块DSP处理板内部并行针对15ms的采集时间可以达到10帧/秒的数据处理速度,基本上可以达到显示需求。但如果系统要求更长的探测距离、更多的数据量和更高的显示帧率,则需要并行处理板具有更高的数据吞吐能力。如显示部分要求20帧/秒的显示速度时,就应当使系统的处理速度达到20帧/秒。普通的并行处理结构增加系统的处理单元时需要做大量的辅助工作,如电子系统的程序、逻辑以及电路板需要大量的改进,而基于IP互连的多波束剖面声纳系统的网络结构在增加系统的处理速度时,只需物理上增加一块相同的处理板,且板上的逻辑和程序无需太多修改,只需要修改板上对应的IP地址,使接收换能器数据发送端能够一点对二点分别发送分帧数据。而网络数据发送端只需在每一帧的数据包的包头上标明发往哪个IP地址即可。系统上电后,先检测局域网内的IP数目,并通过发包回包方式获得系统中各个处理板的IP地址,也可以实现在板上的程序中固定IP地址。这样数据发送端的网络设备就可以循环地将每一帧的数据发往不同的处理板,而系统的处理板分别处理每帧的数据再通过网络分别上传到水上主机端显示,从而线性地提高了系统的处理速度。
图5详细阐述了1~3块处理板组成的基于IP网络传输的并行处理板的系统处理流程。利用每块处理板上的两块TMS320 DM642的网络接口以及DSP的高速处理能力,能够很好地实现基于IP互连网络传输的并行处理,接收换能器的网络发送端以服务器形式向不同的IP地址发送每一帧数据,每块处理板接收的每帧数据分别处理后再由另一端口通过网络形式发送到水上主机端。为防止每块处理板上的两块DSP的网络IP混淆,采用相同的IP地址,数据上传时主机通过路由器接收不同处理板的处理结果,并按照帧率进行显示,这样就可以通过增加处理板来增加系统的显示处理速度。
基于DSP并行处理结构的多波束剖面声纳系统是利用剖面声纳从浅海、浅地层剖面结构分析到海洋石油管线探测以及从以往利用单波束剖面声纳到现在利用多波束剖面声纳的一次新的尝试,结合工程应用改进了声纳的威廉希尔官方网站 指标,系统中提出的流水线并行处理结构以及基于IP网络互连的并行处理结构成倍地提高了系统的处理速度。系统调试结果表明,该系统软硬件结构设计合理、工作稳定、工作效果明显。
责任编辑:gt
-
处理器
+关注
关注
68文章
19273浏览量
229720 -
dsp
+关注
关注
553文章
7998浏览量
348822 -
机器人
+关注
关注
211文章
28398浏览量
206995
发布评论请先 登录
相关推荐
基于TMS320DM642的CCD图像采集系统设计
怎么实现基于TMS320DM642视频采集驱动开发?
基于TMS320DM642的视频采集驱动程序的怎么实现?
TMS320DM642 pdf datasheet
基于DSP TMS320DM642的H.264视频编码的实现
基于TMS320DM642的视频采集卡设计
TMS320DM642-500,pdf(Video/Imag
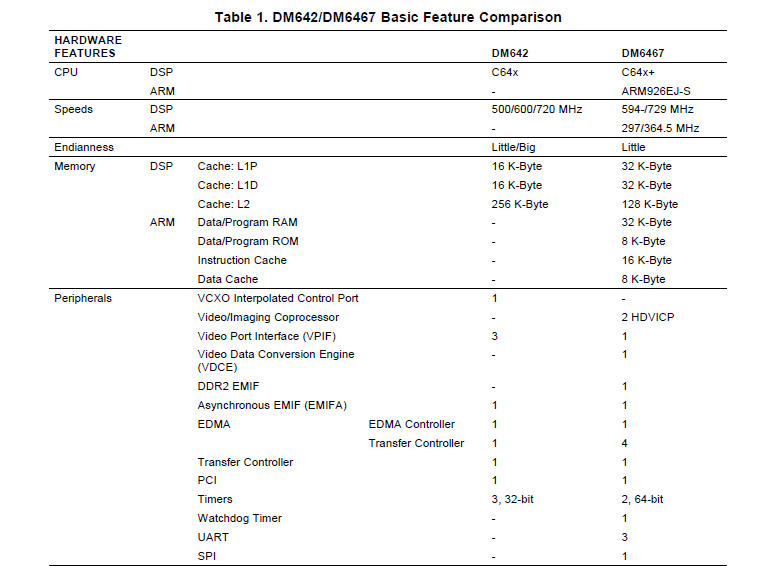
如何从进行TMS320DM642到TMS320DM6467的迁移
基于TMS320DM642视频采集驱动开发
基于TMS320DM642多媒体芯片实现视频监控系统的应用方案
从TMS320DM642迁移至TMS320DM648/DM6437

TMS320DM642至TMS320DM6437迁移指南
TMS320DM642 EVM OSD FPGA用户指南





 工商网监
工商网监
评论