 基于C5402DSP和DS18B20实现PID温度控制系统的设计
基于C5402DSP和DS18B20实现PID温度控制系统的设计
作者:肖洪兵,李冬梅,李朝晖
1 C5402DSP的应用特点
尽管从一般意义上讲,基于MCU(单片机)与DSP(数字信号处理器)这两类器件的系统都有各自的用途,但现在很多新兴的嵌入式应用,尤其是那些大型的复杂系统,在系统内同时实现信号与控制两种处理,它们既需要DSP的功能又需要MCU的功能。笔者正是基于这种尝试,在PID温度控制系统中,将DSP应用到MCU的应用场合,取得了较好的控制效果。随着DSP(数字信号处理器)制造威廉希尔官方网站 的发展,其成本已经下降到较低水平;而DSP的处理速度可满足控制的实时性需求。本设计中选用了性价比高、运算能力强、实时性好的TMS320C5402DSP来实现PID温度控制算法。C5402DSP相对于单片机的主要优势在于:首先,C5402DSP采用的是哈佛结构,有多组总线分别连接到程序存储空间和数据存储空间结构,片内有三组16bit数据总线CB、DB、EB和一组程序总线PB以及对应的4组地址线CBA、DBA、EBA、PBA;其次,具有硬件乘加器,包括一个17*17bit乘法器和一个40bit专用加法器,可以在单周期内完成乘、加运算各一次,运算能力很强;还有,采用了流水线威廉希尔官方网站 ,指令具有6级流水线,相对于单片机而言,速度大大提高;另外,还具有串行口和并行口等外设,可满足控制的输入输出要求。
2 系统硬件结构与工作原理
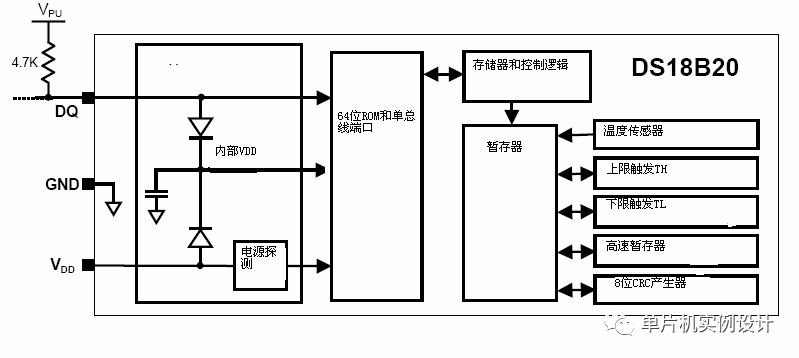
系统的硬件结构如图1所示。本设计主要分为温度采集和PID控制两部分。DSP检查所得温度是否超过上下限值,若超过则报警并转入相应处理;否则根据所要求的标准温度值计算采集温度与标准值的偏差e(n),转入PID算法程序进行处理,得到输出控制信号y(n),通过y(n)来控制加热/降温装置进行工作,达到控温的效果。
图1系统结构原理框图
3 软件设计
本设计主要包括主程序、温度采集子程序、上下限温度值查询子程序、PID子程序等。其中,温度采集子程序和PID子程序是核心,本文将着重介绍。
3.1温度采集程序
DSP芯片通过串口0与单总线温度传感器DS18B20的数据线相连,对现场温度进行采集,DSP芯片TMS320C5402通过串口0读出采集到的温度并对它进行滤波处理;通过串口1写中断,调用显示程序进行温度显示。为便于读者参考,下面给出DS18B20的DSP温度读写程序。
(1)DSP写数据子程序
TX0STM#PCR0,SPSA0
STM#0011001000000010B,McBSP0
RPT#100
NOP
STM#PCR0,SPSA0
STM#0011001000000000B,McBSP0
RPT#1500
NOP
STM#PCR0,SPSA0
STM#0011001000000010B,McBSP0
RET
(2)DSP读数据子程序
RXSTM#PCR0,SPSA0
STM#0011001000000010B,McBSP0
RPT#120
NOP
STM#PCR0,SPSA0
STM#0011001000000000B,McBSP0
RPT#120
STM#PCR0,SPSA0
STM#0011001000000010B,McBSP0
RPT#120
NOP
LD#04H,A
STLA,TMP
PORTWTMP,7H
STM#PCR0,SPSA0
LDMcBSP0,A
AND#0001H,A
BCRX1,ANEQ
RSBXC
BRX2
RX1SSBXC
RX2RORB
LD#02H,A
STLA,TMP
PORTWTMP,7H
RET
3.2 PID算法在DSP上的实现
经典PID控制算法的表达式为:
y(t)=KP*[e(t)+1/TI*∫e(t)dt+TD*de(t)/dt](3.1)
式中:
y(t)—调节器的输出信号
e(t)—调节器的偏差信号,它等于给定值与测量值之差
KP—调节器的比例系数
TI—调节器的积分系数
TD—调节器的微分时间
为了用DSP实现上式,必须将其离散化,用数字形式描述为:
y(n)-y(n-1)=KP[e(n)-e(n-1)]+KI*e(n)+KD[e(n)-2e(n-1)+e(n-2)](3.2)
其中:
KI=KP*T/TI;
KD=KP*TD/T
T—采样周期
e(n)—第n次采样的偏差;
e(n-1)—第n-1次采样时的偏差;
e(n-2)—第n-2次采样时的偏差。
由式(3.2)可知,要计算第n次输出值y(n),只要知道y(n-1),e(n)、e(n-1)、e(n-2)即可。
式(3.2)还可以表示为下式:
y(n)-y(n-1)=d0*e(n)+d1*e(n-1)+d2*e(n-2)(3.3)
式中:
d0=KP(1+T/TI+TD/T)
d1=-KP(1+2TD/T)
d2=KP*TD/T
将式(3.3)代入(3.2)得:
y(n)=d0*e(n)+d1*e(n-1)+d2*e(n-2)+y(n-1)
上述式子是典型的乘加算式,而DSP具有专门的乘加指令,在DSP上非常容易实现;所以,该式成为PID算法在DSP上实现的依据。
在C5402DSP上实现的PID算法程序包括:PID各参量的初始化,计算偏差值e(n),PID算法处理,e(n)、y(n)参数更新等。这些功能在DSP上实现较之单片机而言,显得非常方便。
在DSP上实现的程序代码如下。
(1)PID初始化
startpid:SSBXFRCT;小数方式标志位
STM#en+1,AR1;取e(n-1)地址送AR1
RPT#1;重复2次
MVPD#table,*AR1+;传送初始数据e(n-2),e(n-1)
STM#yn,AR1;取y(n-1)地址送AR1
MVPD#table+2,*AR1;传送初始数据y(n-1))
STM#Kpid,AR1
RPT#2;重复3次
MVPD#table+3,*AR1+;传送初始数据d2,d1,d0
(2)PID算法程序
STM#en,AR1;取e(n)地址送AR1
LD@Tx,A;调入温度值
SUB#TSTD,A;计算温度值与标准值的偏差
STHA,*AR1+;输入偏差e(n)
STM#en+2,AR1
STM#Kpid+2,AR2
STM#2,AR0
LD*AR1-,T;e(n-2)送T
MPY*AR2-,A;d2*e(n-2)
LTD*AR1-;e(n-1)送T,e(n-1)送e(n-2)
MAC*AR2-,A;A+d1*e(n-1)
LTD*AR1+0;e(n)送T,e(n)送e(n-1)
MAC*AR2+0,A
ADDA,@yn,A
STHA,@yn;保存y(n)
PORTW@yn,PA1
RET
4 结语
在过去的设计中我们选用了80C51MCU实现了PID温度控制,但由于单片机的运算功能较差,程序实现的效率不够高,实时性不好。本设计中由于选用了性价比高、运算能力强、实时性好的TMS320C5402DSP来实现PID温度控制算法,取得了较好的控制效果。目前,许多MCU制造厂家在它们的体系结构中增加或扩充了各种DSP功能,例如增加了MAC(乘法累加)指令等。同样,一些DSP体系结构也增加了像集成的外围设备、可编程的外部芯片选择连线、中断驱动的I/O、定时器以及较大的外部存储器等功能部件。将来,对复杂的应用系统,可能不会再明确地区分DSP应用还是MCU应用。因此,DSP与MCU融合的时代即将到来。
责任编辑:gt
-
dsp
+关注
关注
553文章
7987浏览量
348781 -
温度传感器
+关注
关注
48文章
2940浏览量
156031 -
控制系统
+关注
关注
41文章
6605浏览量
110579
发布评论请先 登录
相关推荐
基于DS18B20和LabVIEW的多点温度测量系统
DS18B20 数字温度计特点
DS18B20在温度检测系统中的应用
怎么采用DS18B20和NiosⅡ设计的远程温度控制系统?
DSP~il DS18B20的温度测量系统
基于ARM和DS18B20的温度监测系统
DS18B20温度显示报警控制设计
ds18b20的特性_ds18b20温度传感器应用





 工商网监
工商网监
评论