 一种基于单目视觉的误差检测方法
一种基于单目视觉的误差检测方法
摘 要:双轮差速驱动搬运AGV 在实际运动过程中,由于传感器读数误差和机械传动误差会产生运动累积误差,针对该问题,文中提出一种基于单目视觉的误差检测方法。首先采用基于栅格分割、聚类的方法提取二值图像中的定位块并使用平均值算法计算定位块的中心点;然后根据定位块中心点的相对位置关系建立误差检测计算模型;最后通过实验对本方法进行验证,位置和航向角检测结果误差分别小于1 mm 和1°,证明所述方法具有较高的检测精度。该方法对硬件要求低,具有较高的实用价值。
0 引言
基于双轮差速驱动的仓储物流搬运AGV 结构简单,控制方便,广泛应用于各种物流分拣系统中。由于AGV 搭载的传感器读数误差和机械传动误差具有累计效应,其误差会随着时间的增加而增大。如果不能检测并消除移动过程中产生的位置累计误差和航向角累计误差,将导致导航错误。迄今为止,已经有许多在工业生产中被使用或在实验室里被设计并证明可用的累计误差检测方法。张涛[1] 等人设计了一种基于单目视觉的二维码导航误差检测方法,将定位误差控制在±4 cm 以内;Arturo Gil 等人[2] 通过提取视觉地标,获得它们的相对测量值,通过估算机器人的路径和视觉地标的位置来消除运动过程中的累积误差;张艳[3] 等人使用DM 二维码导航方式检测产生的累积误差,实现了AGV 自主导航与精准定位;罗高[4] 等人使用里程计结合单目视觉测距对移动机器人误差检测和定位威廉希尔官方网站 进行研究;王勇[5]等人通过自适应位姿跟踪,提高了AGV 在高遮挡环境下的定位精度。 目前对运动过程中产生的累积误差进行检测的方法存在位置误差检测以及航向角误差检测精度低、抗干扰能力弱等缺点。为此,本文基于单目视觉[6] 和信标[7,8],设计了一种应用于室内仓储物流搬运AGV 的运动累计误差检测方法。本方法在运动节点处设置特定信标,首先对信标图像进行灰度处理,计算信标图像的内间方差,使用最大内间方差对应的分割阈值对灰度图像进行分割,获取二值图像;其次在二值图像的基础上使用栅格对图像进行分割,对含有前景色的栅格单元进行聚类,使用平均值算法求解信标的中心点坐标,并按照位置关系将中心点与信标定位块一一对应;然后建立误差计算模型,计算运动过程中产生的累积误差;最后通过实验验证所述方法能够检测出仓储物流搬运AGV 运动过程中产生的累积误差,该方法具有较高的精度,满足仓储物流搬运AGV 精准定位的要求。
1 累积误差检测方案
双轮差速驱动搬运AGV 在运动过程中,由于传感器的累积误差、机械传动误差以及装配误差等因素,会导致AGV 通过传感器读数计算的位姿与实际位姿之间产生累积误差。具体表现在短时间内AGV 定位精度下降,随着时间的增加,累积误差会越来越大,最后导致AGV 运动出错。为了保证AGV 运动的正确性,须在累积误差造成运动错误前,检测出累积误差并对误差进行补偿。采用无畸变摄像头,其成像原理[9-10] 如图1 所示,图像传感器所在平面与信标所在平面平行。信标中含有3 个定位块,分别为A、B 、C ,其中A 的中心点为校准点,OC 为摄像头光心,ZC 为摄像机主轴,O-XYZ 为世界坐标系,OC -XCYC ZC 为摄像机坐标系,o1 − x1y1为图像坐标系,o − xy 为信标中各定位块中心点确定的信标坐标系,o′ − x′y′为信标坐标系在图像平面的投影。 依据定位块A、B 、C 在图像传感器上成像中心点坐标之间的相对位置确定坐标系o′ − x′y′。通过建立坐标系o′ − x′y′与坐标系o1 − x1y1之间的旋转、平移关系模型,可以计算出航向角累积误差θ ,在摄像头安装高度h 和摄像头焦距f 已知的条件下,可以求出图像传感器中心点在信标坐标系下关于x 轴、y 轴的位置累积误差dx、dy。
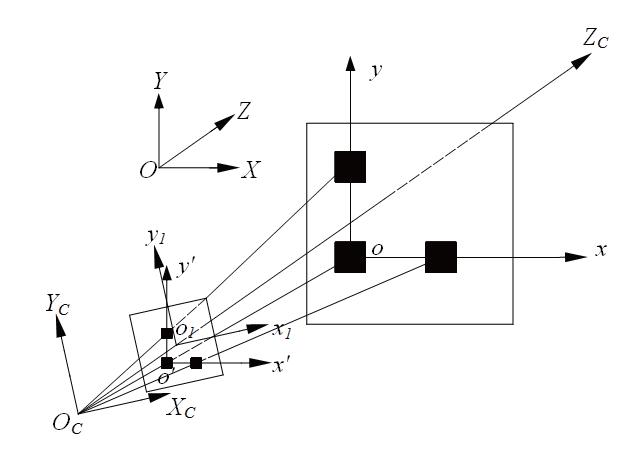
图1 世界坐标系与图像坐标系之间的关系模型
2 计算定位块中心点在图像传感器上坐标
2.1 基于栅格分割的聚类方法 首先按照灰度处理[11]、求解最大内间方差[12]、动态阈值分割[13]、中值滤波[14] 流程获取二值图像,然后分别提取出前景色中的3 个定位块,并计算每个定位块的中心点坐标,确定坐标系o′ − x′y′ 。信标的分割聚类方法是采用栅格将二值图像分割成若干个单元,再对栅格单元进行聚类,从前景色中将3 个定位块分离。使用聚类法从分割后的图像中筛选出含有前景色的单元,按照以下方法分离定位块: Step1 设所有含有前景色像素点的单元构成集合S ,S ={s 1,s 2,s 3,……,sn},通过遍历法可确定集合S 中所有的元素; Step 2 建立空集A1,将集合S 中的第1 个元素s 1添加到集合A1 中并将s 1 从集合S 中移除; Step 3 从集合S 第1 个元素开始,依次取集合S 中的元素si 与集合A1 中的所有元素进行比较,若这两个元素代表的单元相邻,则将集合S 中的元素si 添加到集合A1 中并将元素si 从集合S 中移除; Step 4 重复步骤Step 3,直至集合A1 中的任意元素aj 与集合S 中任意元素si 分别所代表的单元不相邻; Step 5 判断集合S 是否为空集,若为空集则前景色分聚类完成,否则重复Step 2 至Step 5,分别建立集合A2、A3、A4、……、An,直至集合S 为空集,并且将A1、A2、A3、……、An 作为元素构成集合A,即A={A1,A2,A3……An}。分割聚类实验结果如图2 所示。
图2 分割聚类结果 2.2 各定位块中心点坐标计算 对于至少具有两条互相垂直的对称轴图形,可使用平均值算法计算图形中心点。图形中心点坐标满足

式中:xt 为第t 个定位块的中心点在图像坐标系o1 − x1y1下的横坐标, yt 为第t 个定位块的中心点在图像坐标系o1 − x1y1 下的纵坐标,n 为第t 个定位块中黑色像素点的总个数,xi 为第t 个定位块中第i 个黑色像素点在图像坐标系o1 − x1y1下的横坐标,yi 为第t 个定位块中第i 个黑色像素点在图像坐标系o1 − x1y1 下的纵坐标。 利用式(1) 可以计算出集合A 中每个元素对应的中心点坐标oi,所有中心点构成集合O,即O={ o 1,o 2,o 3,……,on }。对于所述方法,O={ o 1,o 2,o 3 }。任意两定位块中心点之间的距离
式中:h 为摄像头的安装高度,f 为摄像头的焦距,xi 为中心点oi 在图像坐标系o1 − x1y1下的横坐标,yi 为中心点oi 在图像坐标系o1 − x1y1下的纵坐标,xj 为中心点oj 在图像坐标系o1 − x1y1 下的横坐标,yj 为中心点oj在图像坐标系o1 − x1y1下的纵坐标。i、j k 分别取1、2、3 且互不相同。当dk 取得最大值时中心点及对应边长如图3 所示。
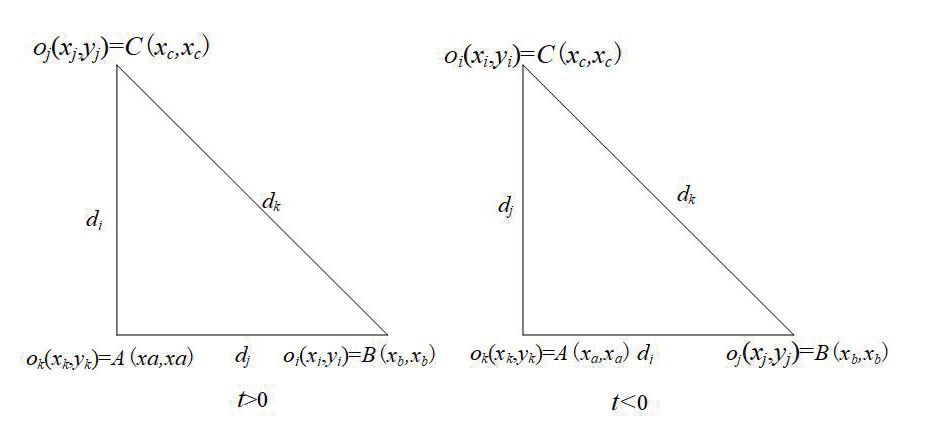
图3 中心点及对应边长 中心点ok 对应定位块A,记中心点ok 的坐标为(xk,yk),取中心点oi(xi,yi),构建向量,利用式(3)判断中心点oj(xj,yj)与向量之间的关系,有  当t > 0,点oj 在oi 的左侧,中心点oi 对应定位块B ,中心点oj 对应定位块C ;当t < 0,点oj 在oi 的右侧,中心点oi 对应定位块C ,中心点oj 对应定位块B 。确定定位块中心点在图像坐标系o1 − x1y1下的坐标,将定位块A、B 、C 的中心点在图像传感器上的投影记为A(xa , ya ), B(xb , yb ),C(xc , yc )。
当t > 0,点oj 在oi 的左侧,中心点oi 对应定位块B ,中心点oj 对应定位块C ;当t < 0,点oj 在oi 的右侧,中心点oi 对应定位块C ,中心点oj 对应定位块B 。确定定位块中心点在图像坐标系o1 − x1y1下的坐标,将定位块A、B 、C 的中心点在图像传感器上的投影记为A(xa , ya ), B(xb , yb ),C(xc , yc )。
3 累积误差计算模型
图像坐标系o1 − x1y1与信标投影坐标系o′ − x′y′之间的旋转、平移关系模型如图4 所示。图中,dx 为AGV 在信标坐标系下X 轴方向上位置累积误差,dy 为AGV 在信标坐标系下Y 轴方向上位置累积误差,θx 为AGV 在信标坐标系下X 轴方向上航向角累积误差,θy 为AGV 在信标坐标系下Y 轴方向上航向角累积误差,有
图4 累计误差计算模型

4 实验结果
实验采用无畸变摄像头,将其安装于AGV 的回转中心并与地面保持平行,拍摄位于地面的特定信标。利用所述方法计算在任意位置下的位置偏差和角度偏差,将实际测量值与计算结果进行比较。每次实验进行20次计算,进行6 次独立重复实验。选取第1 次、第10 次、第20 次的实验结果和实际测量结果,如表1 所示。第1 次独立重复实验的计算结果与实际测量结果进行比较,误差如图5 所示。图5 计算结果与测量结果之间的误差由表1 可知,每次独立重复实验计算结果,dx、dy的波动不超过1 mm,θ 的波动不超过0.5°,说明本方法计算结果具有较高的稳定性。从图5 可以看出,每次独立重复实验计算结果与实际测量结果相比较,dx、dy的误差不超过1 mm,θ 的误差不超过1°,说明本方法具有较高的准确度。6 次独立重复实验的计算结果与实际测量结果相比较,结果都在误差允许范围内,说明本方法具有较高的可靠性。
5 结语
从信标特征识别开始到定位偏差计算,研究了一种用于仓储物流搬运AGV 运动累积误差检测方法。针对特定的信标,在特征提取中使用栅格对二值图像进行分割,对栅格单元进行聚类,利用平均值算法计算信标中定位块的中心点坐标,建立图像与世界坐标系的旋转、平移关系模型,计算仓储物流搬运AGV 在世界坐标系下的位姿。最后通过实验测量,将计算结果与测量结果比较,证明所述方法具有较高精度、稳定性和可靠性。进一步提高图像处理速度和提高定位精度是下一步研究重点。
责任编辑:lq
-
传感器
+关注
关注
2550文章
51047浏览量
753163 -
视觉
+关注
关注
1文章
147浏览量
23937 -
AGV
+关注
关注
27文章
1304浏览量
41078
原文标题:基于单目视觉的仓储物流搬运AGV 累积误差检测方法研究
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一种将NeRFs应用于视觉定位任务的新方法

一种简单高效配置FPGA的方法
八种提高SMT贴片质量的检测方式

视觉检测威廉希尔官方网站 冲破人工界限

视觉检测设备的分类

赛默斐视表面瑕疵检测系统是一种利用机器视觉威廉希尔官方网站

漂移误差、随机误差、系统误差这三种误差到底是怎么引发的?
焊接视觉检测系统的原理和应用






 工商网监
工商网监
评论