 碳纳米管纱线为何物?
碳纳米管纱线为何物?
2021 年,机器人已经「成精」了,公然吵架、组团热舞再也不是人类专属。
然鹅在很多人心里,机器人还是僵硬、机械甚至冰冷的。
即便如此,威廉希尔官方网站 日新月异,柔性机器人快速发展,我们对机器人的刻板印象也该被打破了。
科学家们设计出的软体机器人在外形上可谓五花八门,比如:
由磁场驱动的软体机器人,看上去像是花瓣一样。
会奔跑、能游泳、能举重物的“小猎豹”。
可用于军事行动的快速隧道挖掘机器人。
其实,软体机器人的设计往往与一种智能材料有关——人工肌肉。
最近在这一领域,我国科学家联合美、韩、澳等多国学者做出了新突破!
相比传统人工肌肉,此次研究人员设计出的人工肌肉具有无毒、驱动频率高(10 Hz)、驱动电压低(1 V)、高比能量(0.73~3.5 J/g)、高驱动应变(3.85~18.6 %)、高能量密度(高达8.17 W/g)的特性。
▍碳纳米管纱线为何物?
2021 年 1 月 29 日,题为 Unipolar-Stroke, Electroosmotic-Pump Carbon Nanotube Yarn Muscles(单极冲程、电渗泵碳纳米管纱线肌肉)的论文发表于著名学术期刊《科学》(Science)。
论文出自哈尔滨工业大学(复合材料与结构研究所)、江苏大学(智能柔性机电研究所)、常州大学(江苏省光伏科学与工程协同创新中心)、美国德克萨斯大学达拉斯分校、伊利诺伊大学厄巴纳-香槟分校、韩国汉阳大学、首尔大学、澳大利亚卧龙岗大学、迪肯大学等团队。
论文题目中有个看起来有点儿高深的词「碳纳米管纱线」(Carbon nanotube yarns),那么在谈具体的研究细节之前,我们先来解决一个问题:碳纳米管纱线为何物?
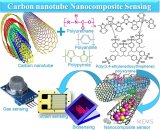
碳纳米管纱线源自碳纳米管——一种具有特殊结构的一维量子材料,径向尺寸为纳米量级、轴向尺寸为微米量级、管子两端基本都有封口。外形上,它是由呈六边形排列的碳原子构成的数层同轴圆管,层与层之间的固定距离约 0.34 nm,而圆管的直径一般为 2~20 nm。
据了解,碳纳米管作为一维纳米材料,重量轻、有着完美的连接结构,因而有着独特的力学、电学、化学性能。
基于这样的奇特存在,碳纳米管纱线也应运而生。
根据字面意思即可知,这是通过拉伸和松弛、由碳基纳米管纤维制成的紧密绞合的纱线。
不同于普通意义上的纱线,碳纳米管纱线其实是一种超导体,还可当电池使用——早在 2011 年,德克萨斯大学就与美国企业展开合作,致力于将碳纳米管纱线推向市场。
2017 年,德克萨斯大学达拉斯分校又研制出一种名为 Twistron 的碳纳米管纱线。
当时该研究团队的李娜博士曾在采访中表示:
这些纱线本质上是一种超级电容器,但无需外加电源充电。因为碳纳米管与电解质的化学电势不同,当纱线浸入电解质时,一部分电荷便会嵌入其中。纱线被拉伸时,体积减小,使电荷相互靠近,电荷产生的电压增高,从而获得电能。
2014-2016 年,一位名为楚合涛的博士生在哈尔滨工业大学和德克萨斯大学达拉斯分校接受联合培养,也正是自那时起,哈尔滨工业大学冷劲松教授课题组与德克萨斯大学达拉斯分校 Ray H. Baughman 教授课题组开始了有关碳纳米管纱线人工肌肉的研究。
此次,已是博士毕业生的楚合涛正是论文的共同一作。
▍人工肌肉性能实现新突破
那么,碳纳米管纱线和人工肌肉之间,又有怎样的联系?
论文介绍,渗透离子(不论正负)会影响着长度、直径的变化,因此碳纳米管纱线可用作电化学致动器。
据悉,碳纳米管纱线人工肌肉是一种典型的智能材料,主要通过热、电化学两种方式实现驱动,而两种驱动方式存在着差别。
根据热力学定律,热驱动受着卡诺循环效率(Circulation efficiency in Kano,即有一个高温热源温度 T1 和一个低温热源温度 T2 的简单循环)的制约——相比而言,电化学驱动的能量转换效率更高,具有更广阔的应用前景。
基于这一点,研究团队构建了一种全固态肌肉(all-solid-state muscle)。通过向纱线中渗透带电的聚合物,纤维开始部分膨胀,随着离子的损失长度会增加,这样也增加了肌肉的总冲程。
哈尔滨工业大学官方表示,研究人员首次发现通过聚电解质功能化的策略,可实现人工肌肉智能材料的“双极”(Bipolar)驱动转变为“单极”(Unipolar)驱动(如下图所示),同时发现了人工肌肉随电容降低、驱动性能增强的反常现象(Scan Rate Enhanced Stroke, SRES)。
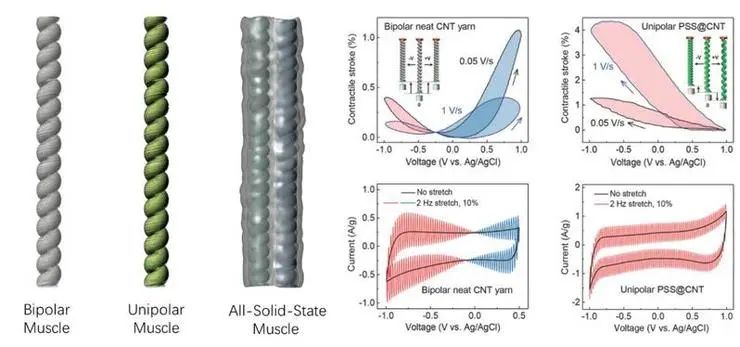
具体而言,研究人员得到了如下效果:
实现了单一离子嵌入、嵌出的“单极”效应,解决了“双极”效应反向离子的嵌入、嵌出引起的性能降低问题,提高了做功效率与能量密度等性能;
人工肌肉随扫描速率增加,驱动性能增加,解决了传统人工肌肉驱动性能的电容依赖性问题。
哈尔滨工业大学认为:
这一重要突破解决了人工肌肉驱动性能的电容依赖性问题,为后续设计具有无毒、低驱动电压的高性能驱动器提供新的理论基础。
值得一提的是, 这一突破在空间展开结构、仿生扑翼飞行器、可变形飞行器、水下机器人、柔性机器人、可穿戴外骨骼、医疗机器人等领域具有巨大的应用潜力。
▍关于作者
早在 20 世纪 90 年代初,哈尔滨工业大学复合材料与结构研究所就已确立了智能材料与结构的研究方向。
实际上哈工大在这一领域的探索,离不开一个名字——冷劲松。
博士毕业于哈尔滨工业大学复合材料专业的冷劲松教授自 2004 年起担任着哈工大航天学院复合材料与结构研究所教授、博导的职务。

1992 年起,冷劲松教授就开始开展智能材料系统和结构的研究,主要研究方向包括智能材料系统和结构系统、光纤传感器、结构健康监控、复合材料结构设计和工艺威廉希尔官方网站 、可变翼飞行器、结构振动主动控制、光纤通讯和微波光电子器件、微机电系统等等。
另外,冷劲松教授也在 International Journal of Smart & Nano Materials 担任主编,在 Smart Materials & Structures 和 Journal of Intelligent Material Systems and Structures 等国际杂志担任副主编。2006 年入选教育部新世纪优秀人才计划,2007 年入选长江学者特聘教授,2018 年当选欧洲科学院物理与工程学部外籍院士(Members of the Academia Europaea)。
值得一提的是,此次论文的通讯作者之一正是冷劲松教授。
2020 年 3 月 4 日,冷劲松教授团队与美国马里兰大学 Norman M. Wereley 教授团队的共同研究成果发表于国际著名期刊 Soft Robotics ,展示了一种受象鼻启发的、在可伸展/收缩的气动人工肌肉的基础上设计的新型弯曲螺旋可伸展/收缩气动人工肌肉(HE-PAMs/HC-PAMs)。
此次的研究,使得该团队在人工肌肉方面的探索更为深入,未来这一领域还会有何突破,我们将保持关注。
责任编辑:lq
-
机器人
+关注
关注
211文章
28405浏览量
207012 -
Science
+关注
关注
0文章
22浏览量
3374 -
柔性机器人
+关注
关注
1文章
38浏览量
4544
原文标题:哈工大等实现人工肌肉重大突破登上Science!
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
安泰功率放大器应用:碳纳米管薄膜YMUS超声波喷涂
碳纳米管在光电器件中的应用 碳纳米管的功能化改性方法
碳纳米管的结构与特性解析 碳纳米管在能源储存中的应用
碳纳米管的导电性能介绍 碳纳米管如何提高材料强度
碳纳米管与石墨烯的比较 碳纳米管在复合材料中的应用
碳纳米管的主要应用领域 碳纳米管在电子产品中的优势
碳纳米管介绍:性能突出的导电剂

ATA-7025高压放大器在电致发光纱线性能研究中的应用
金银纳米颗粒对单壁碳纳米管实现近红外荧光增强

九号电动将于4月19日发布新品智能碳晶电池
日本中央大学研发新传感器,无损检测与三维重建获突破

思特威推出国产5000万像素尺寸手机图像传感器SC5000CS,美国将十多家中国企业列入"中国军方企业名单&qu

碳纳米管晶体管兼容已有半导体制程工艺,解决碳纳米管均匀可控掺杂难题

Imec 与三井化学公司签署战略合作协议,将用于 EUV 光刻威廉希尔官方网站 的 CNT 薄膜威廉希尔官方网站 商业化





 工商网监
工商网监
评论