 如何使用HCSR04和STM32F103ZET6制做超声波测距仪
如何使用HCSR04和STM32F103ZET6制做超声波测距仪
背景:最近整理东西,发现了一个蓝色的小模块,上面还有两个像喇叭的小东西,关键上面还有丝印,用蓝底白字写着“HC-SR04”,于是勾起了我的好奇心,动动小手指,百度找到了这个小板子的信息,原来是一个超声波测距模块,还挺有意思的,而且只引出来了四个引脚,应用也比较简单,下面简单介绍下这个模块以及简单的超声波测距方案。
1.HC-SR04模块实物图和工作原理
1.1实物如下图,可以看到这个模块是双面贴片的,整体感觉大气,印出来了四个引脚,分别是GND,Echo,Trig,VCC具体功能见下方
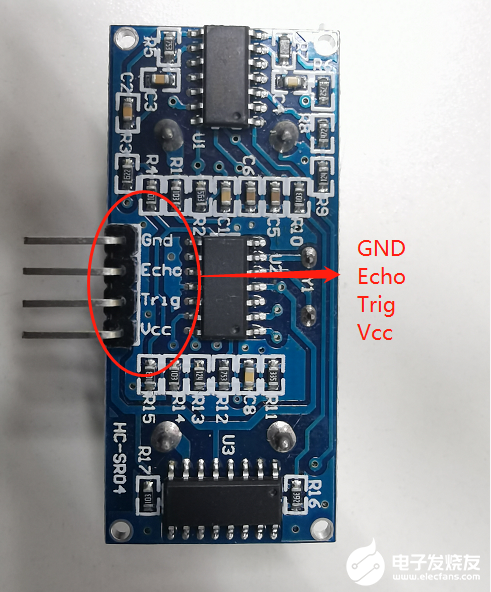
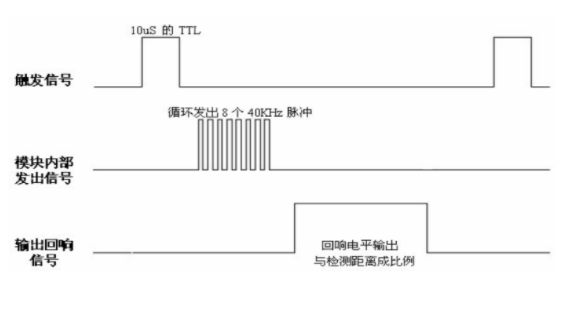
1.2首先这个模块是要单独供电的,需要给VCC接5V,GND就不多说了关键是Echo和Trig这两个脚,可以看下方的时序图。
a.需要给触发信号即Trig一个大于10us的方波信号
b.模块内部会产生一个8*40KHz的声波,因为是内部产生的,所以引出的四个脚测不出来这个信号,或许可以从PCBA里面其它地方测出,我没深入研究
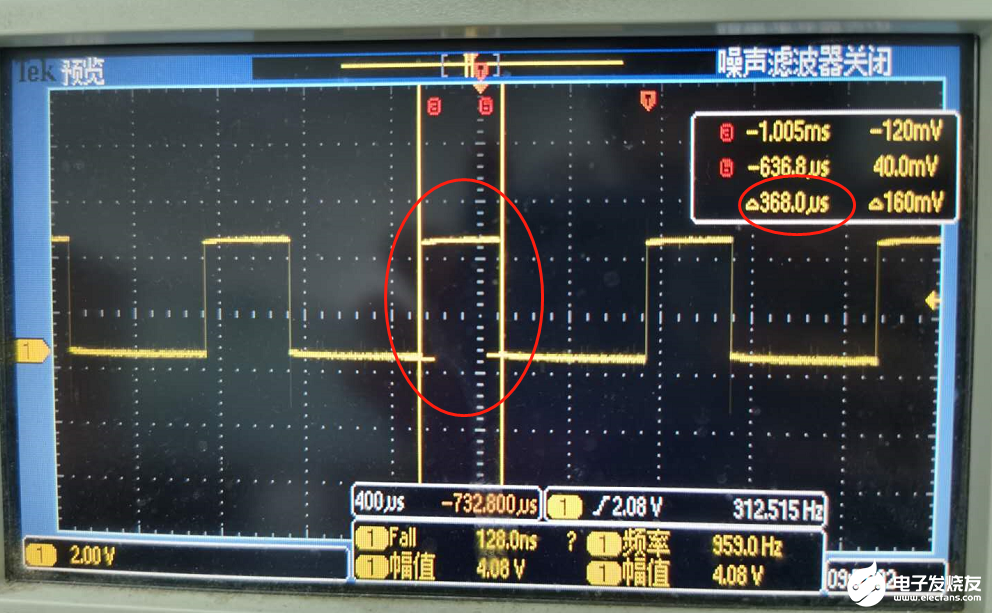
c.输出回响信号,即Echo会返回一个高电平信号,这个高电平的持续时间和测量距离有关。
计算测距方法:我可以用一个遮挡物挡在两个突出物上方,通过初中的只是我们都知道距离=速度*时间/2,速度在空气中的速度约等于340m/s,时间即Echo的高电平信号。所以我们可以很简单的就测量出遮挡物到模块的距离。
2.要掌握的知识点和设备
2.1硬件环境
我这边用的是HC-SR04模块+STM32F103ZET6开发板+示波器,示波器是帮助分析用,可以验证设计和实际是否一致的工具,可以不要。开发板也只是起一个连接串口调试助手,产生PWM以及输入捕获的一个功能,并不一样要和我一样的开发板,理论上任何一个开发板都可以实现这个功能。
2.2软件知识
要用上面这套工具实现超声波测距的功能,需要的代码知识点也说过了,这里再提一下。
a.PWM输出一个脉冲大于10us的方波到Trig,可以用STM32的定时器输出
b.输入捕获Echo接受到的高电平信号,通过测量接受到的高电平时间,即可通过距离=速度*时间/2计算出距离。
c.串口调试,我们要通过串口调试助手打印出测量的时间和距离,可以方便直观的看到我们的结果。
理论上掌握上面三个技能就可以实现超声波测距的这个简单的项目,当然条条大路通罗马,上面的方式也不是唯一的一种。譬如我可以用信号发生器产生方波,就可以不用定时器了。毕竟工具只是工具而已。
3.代码编写,代码是参考的正点原子的PWM输出和输入捕获,因为项目原理上面说过了,基本就是这两个功能的叠加。我本来想用HAL库来做,但是CUBEMX生成的代码调试没成功,所以最后还是用的原子的标准库来做的。下面代码截取的是main.c和time.c。也是这个项目里面最重要的两个部分。
extern u8 TIM5CH1_CAPTURE_STA; //输入捕获状态 extern u16 TIM5CH1_CAPTURE_VAL; //输入捕获值 int main(void){ u32 temp=0; double ss=0; delay_init(); //延时函数初始化 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级 uart_init(115200); //串口初始化为115200 TIM3_PWM_Init(71,199); //不分频。PWM频率=72000/(899+1)=80Khz TIM5_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数 while(1) { delay_ms(10);// TIM_SetCompare2(TIM3,TIM_GetCapture2(TIM3)+1); TIM_SetCompare2(TIM3,63); if(TIM_GetCapture2(TIM3)==300)TIM_SetCompare2(TIM3,0); if(TIM5CH1_CAPTURE_STA&0X80)//成功捕获到了一次上升沿 { temp=TIM5CH1_CAPTURE_STA&0X3F; temp*=65536;//溢出时间总和 temp+=TIM5CH1_CAPTURE_VAL;//得到总的高电平时间 ss=temp*340/2/1000; printf(“高电平时间:%d us\r\n”,temp);//打印总的高点平时间 printf(“测试距离为:%3.0f mm\r\n”,ss); TIM5CH1_CAPTURE_STA=0;//开启下一次捕获 delay_ms(500); } }}
void TIM3_Int_Init(u16 arr,u16 psc){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_ITConfig( //使能或者失能指定的TIM中断 TIM3, //TIM2 TIM_IT_Update | //TIM 中断源 TIM_IT_Trigger, //TIM 触发中断源 ENABLE //使能 ); NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 TIM_Cmd(TIM3, ENABLE); //使能TIMx外设 }void TIM3_IRQHandler(void) //TIM3中断{ if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 { TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源 LED1=!LED1; }}//PWM输出初始化//arr:自动重装值//psc:时钟预分频数void TIM3_PWM_Init(u16 arr,u16 psc){ GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟使能 GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2-》PB5 //用于TIM3的CH2输出的PWM通过该LED显示 //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIO_WriteBit(GPIOA, GPIO_Pin_7,Bit_SET); // PA7上拉 TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR2上的预装载寄存器 TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的预装载寄存器 TIM_Cmd(TIM3, ENABLE); //使能TIMx外设}//定时器5通道1输入捕获配置TIM_ICInitTypeDef TIM5_ICInitStructure;void TIM5_Cap_Init(u16 arr,u16 psc){ GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能TIM5时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前设置 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入 GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉 //初始化定时器5 TIM5 TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 //初始化TIM5输入捕获参数 TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上 TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波 TIM_ICInit(TIM5, &TIM5_ICInitStructure); //中断分组初始化 NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; //TIM3中断 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允许更新中断 ,允许CC1IE捕获中断 TIM_Cmd(TIM5,ENABLE ); //使能定时器5}u8 TIM5CH1_CAPTURE_STA=0; //输入捕获状态 u16 TIM5CH1_CAPTURE_VAL; //输入捕获值//定时器5中断服务程序 void TIM5_IRQHandler(void){ if((TIM5CH1_CAPTURE_STA&0X80)==0)//还未成功捕获 { if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET) { if(TIM5CH1_CAPTURE_STA&0X40)//已经捕获到高电平了 { if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了 { TIM5CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次 TIM5CH1_CAPTURE_VAL=0XFFFF; }else TIM5CH1_CAPTURE_STA++; } } if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕获1发生捕获事件 { if(TIM5CH1_CAPTURE_STA&0X40) //捕获到一个下降沿 { TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽 TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5); TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获 }else //还未开始,第一次捕获上升沿 { TIM5CH1_CAPTURE_STA=0; //清空 TIM5CH1_CAPTURE_VAL=0; TIM_SetCounter(TIM5,0); TIM5CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿 TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获 } } } TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位}
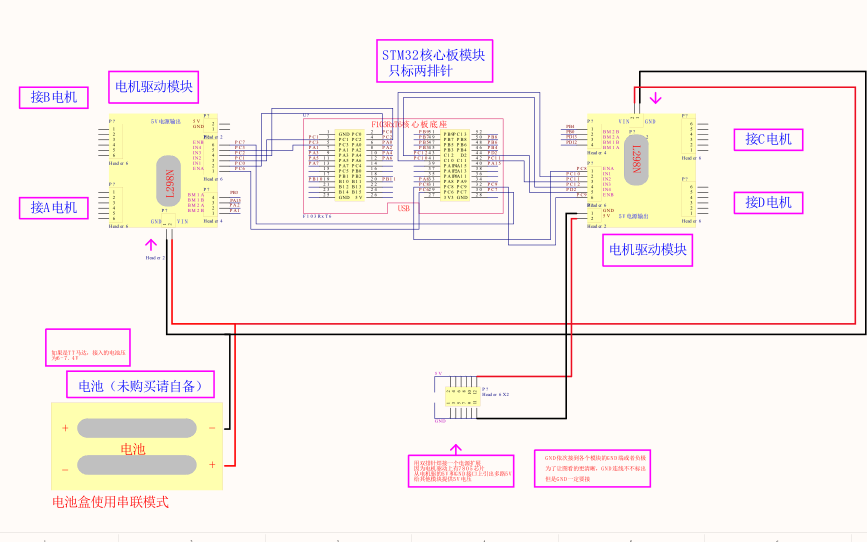
4.硬件连接以及实验照片
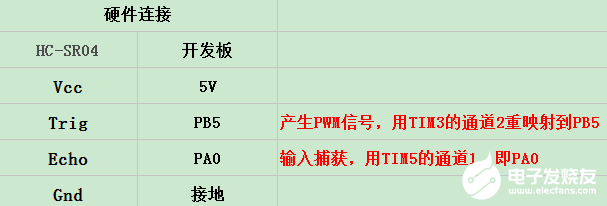
4.1硬件连接
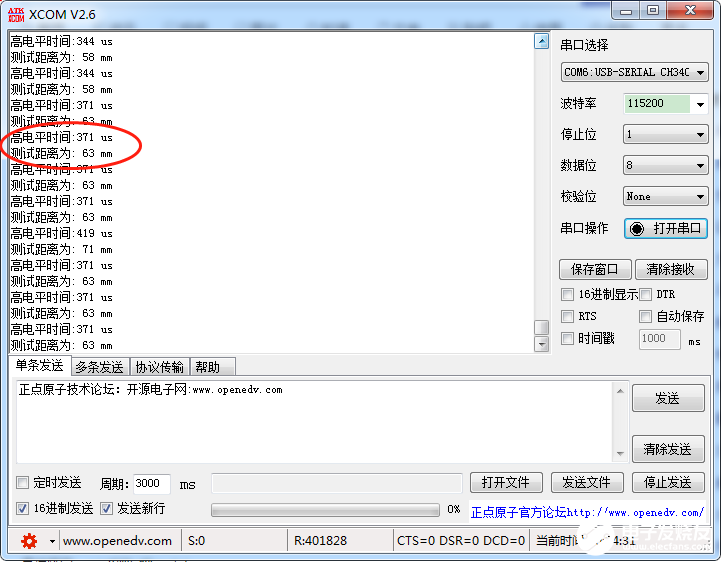
4.2串口显示结果
4.3Echo和Trig信号

基本功能是实现了,以上就是对HC-SR04这个模块的简单介绍和使用分享。当然这个模块也很常见,网上类似的分享也挺多的,但和我一样的肯定没有,起码图片都是我新鲜截取拍摄的,这次的测试也是我花了些心思做出来的,我的小目标就是攒齐3个原创文章,贴一个加V的认证,看了下原创活动是到今年年底,也算是今年的一个年度计划吧,希望可以实现。
-
STM32
+关注
关注
2270文章
10896浏览量
355756 -
测距仪
+关注
关注
0文章
117浏览量
18429 -
定时器
+关注
关注
23文章
3246浏览量
114726
发布评论请先 登录
相关推荐
STM32F103ZET6超声波测距hcsr04模块
如何用STM32F103ZET6和HC-SR04超声波测距模块给直升机航模测高度呢
超声波HCSR04模块的工作原理是什么
使用STM32F103ZET6核心板实现超声波避障的程序和电路图免费下载






 工商网监
工商网监
评论