 科聪全新AGV/AMR控制器MRC3000及自主导航控制系统上市
科聪全新AGV/AMR控制器MRC3000及自主导航控制系统上市
近期,科聪最新MRC3000控制器震撼上市,基于MRC3000为核心的移动机器人自主导航控制系统现可试用。
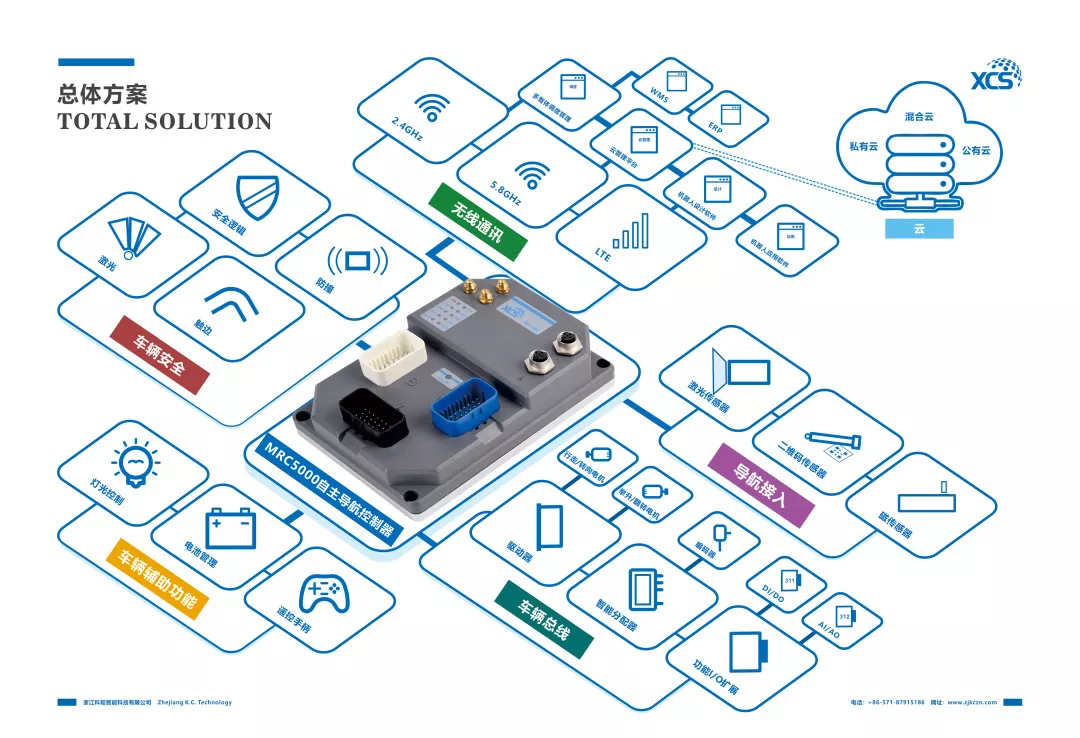
解决方案以MRC3000控制器为核心,适用于仓储物流、航天军工、智慧城市、智能制造等行业的轻载搬运机器人,巡检机器人等。方案包含核心硬件及其配套软件,具有高可靠性、高性价比、高灵活的特点。 方案拥有灵活易用的二次开发平台,通过图形化的方式对机器人控制逻辑和应用功能进行设计,提供自然导航、激光导航、二维码导航多种导航方式,支持两驱差速、四驱差速、麦克纳姆轮底盘方式。
可应对不同的场景,实现自主导航功能。 全新3.0系列软件同步发布机器人设计软件1、向导式机器人设计全过程可通过图形化方式,对移动机器人(AGV/AMR)进行相关基础配置,例如车辆本体长宽、运动中心坐标、安全保护范围等基本信息,以及机器人底盘模式、驱动器型号、轮子信息的配置;导航方式的设置;控制器上硬件通道的配置。配置完成之后,系统自动生成相关程序页。
2、支持IEC标准编程语言,内置全面的william hill官网 功能块内置IEC标准库,包含逻辑运算、数学运算、通讯处理等功能块;内置移动机器人控制库包含底盘控制、导航控制、调度控制等功能块;支持用户自主定制实现功能的模块。以实现车辆功能(如超声避障、激光避障、抬升装置、顶升装置、信号灯、开关控制等)。
3、支持在线调试、一键下载、组态热更新在机器人运行过程中,软件支持在线调试,实时监控机器人的全部状态信息,保障机器人可靠稳定运行。在机器人调试过程中,更改或配置相关参数程序,机器人可不停机,一键下载更新至控制器。即可完成功能更新。
机器人应用软件1、构建应用地图、编辑应用地图使用地图管理功能,控制车辆投入现场使用环境,让机器人对现场环境进行认知,自动绘制现场地图,最大支持400000平方米地图。使用工具可对地图上无用信息进行擦除,不同地图还可做拼接、叠加,让地图构建更加精准、方便。
2、路径规划和配置根据用户需要,对已知地图进行路径点、路径、避障区域、检修区域、交通限流区域等的规划,完成配置下载地图至控制器,机器人即可按照控制器内置地图执行任务。
3、机器人交通管理可在同一地图上管理不同导航方式、不同类型、不同路径的机器人
4、调度任务配置根据需求,对多台机器人进行调度任务的编辑,现在对多台机器人的规划提升工作效率。
多智体调度管理软件1、多智体调度管理 管理多种智体、3D可视化监控基于跨不同操作系统平台的监控架构,可与MES、WMS、ERP等系统无缝对接。实现各种类型智能机器人的任务分配、路径规划、调度协调、交通管制、运行维护和监控显示等功能,同时管理现场各类型智体(工业机器人、产线、门控、电梯、PLC等)的协同工作。
责任编辑:xj
原文标题:科聪推出全新AGV/AMR控制器MRC3000及自主导航控制系统
文章出处:【微信公众号:新战略机器人】欢迎添加关注!文章转载请注明出处。
-
AMR
+关注
关注
3文章
428浏览量
30229 -
AGV
+关注
关注
27文章
1308浏览量
41084 -
自主导航
+关注
关注
0文章
12浏览量
5280
原文标题:科聪推出全新AGV/AMR控制器MRC3000及自主导航控制系统
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
涨姿势 一文看懂AGV和AMR的联系与区别

精准对接 高寿命-AGV充电连接器解析


ecu电子控制器与牵引力控制系统的区别
凤凰动力资深工程师必须了解的AGV/AMR硬件组成部分


AGV控制系统的应用方案:ARMxy系列控制器
AGV是什么? ——科聪智能自主导航控制系统
agv叉车怎么运行的?速度受哪些因素影响?有哪些不确定因素?

PLC控制系统与继电器控制系统的比较
PID控制器与PWM控制器的区别
移动机器人幕后的全能冠军——MRC5000

DCS控制系统原理 DCS控制系统的基本功能
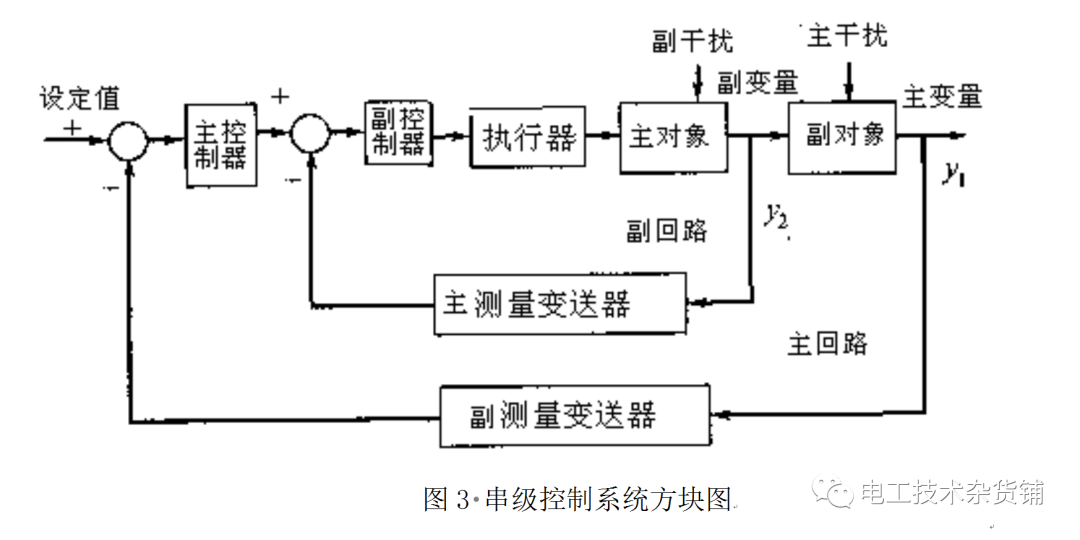
串级控制系统的特点有哪些





 工商网监
工商网监
评论