 康奈尔大学蜂群无人机在编队飞行时动态可避开障碍物
康奈尔大学蜂群无人机在编队飞行时动态可避开障碍物
国外DroneDJ网站12月17日报道,来自康奈尔大学(Cornell University )和arXiv实验室的研究人员展示了他们最新的无人机项目,其可使蜂群无人机在编队飞行时动态避开障碍物。
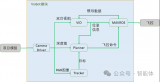
据介绍,该项目采用分布式异步(decentralized and asynchronous)系统解决方案。测试的这些无人机已经用一种特殊的避障威廉希尔官方网站 改造过,可以在彼此的帮助下动态避开障碍物。每架无人机都配备了视觉传感器,可以创建虚拟的地图。所有的数据又被收集起来来创建一个大的地图,每架无人机可以以此确定自己的飞行方向。
报道称,该系统已经在处理能力非常低、无线连接也很差的条件下进行过测试,这使得它成为农村和没有网络连接的地区的一个很好的解决方案。只需三架无人机既可以用相当快的速度穿越森林而不会撞到树。
该研究小组称,该方案可以很容易地扩大到更大规模的无人机编队上,目前他们已经测试了10架无人机编队。空中的无人机越多,就越可以在更短的时间内收集到更多的数据,这非常适于执行测绘和搜索救援任务。
责任编辑:PSY
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
无人机
+关注
关注
229文章
10427浏览量
180223 -
障碍检测
+关注
关注
0文章
2浏览量
5609 -
蜂群算法
+关注
关注
0文章
16浏览量
2569
发布评论请先 登录
相关推荐
集性能与成本于一身的IMU,让无人机飞行更稳定
无人机在进行任何形式的飞行时,必须了解空中平台的方向、其运动的性质以及飞行方向。通常用于测量此运动的是IMU,IMU提供与无人机三个轴向的加速度和角速度数据,以及有关

无人机飞行仿真模拟训练系统
智慧华盛恒辉无人机飞行仿真模拟训练系统,也称无人机仿真训练模拟器,是一种集模拟训练演练与无人机飞行控制数据模拟验证于一体的仿真系统。 一、系
开源项目!用ESP8266 DIY会爬墙的无人机
有点神奇,作者表示,下面介绍的这个无人机就能做到!
一个基于NodeMCU飞行控制器和安卓应用控制的爬墙项目。完整的细节和解释视频。
我相信,你会爱上它。
玩无人机需要一个飞行控制器,
发表于 07-04 09:22

特信无人机反制系统:精准区分无人机与其他飞行物的关键威廉希尔官方网站 解析
无人机反制系统在现代航空管理中扮演着至关重要的角色,其首要任务之一就是准确区分无人机与其他飞行物。这一功能的实现依赖于多种威廉希尔官方网站
手段的综合应用,确保系统能够精确、高效地作出判断。
首先,无
北极芯微dToF传感器大规模量产交付无人机市场
当今,无人机威廉希尔官方网站
已经广泛渗透到各个产业领域,为我们带来了前所未有的便捷和效率。无人机在飞行过程中需要实时感知障碍物和飞行高度,以确保安全、稳
想做无人机编队表演?需要掌握哪些?
最近”低空经济“火了,嵌入式工程师应该学习哪些威廉希尔官方网站
栈才能做无人机编队表演?一、什么是无人机编队表演?无人机

分布式无人机蜂群的工作原理
蜂群中的无人机通过无线通信协议相互连接,实现实时信息交流和指令传递。它们可以共享任务目标、位置信息和传感器数据,以便更好地协同工作。
发表于 03-14 10:35
•1236次阅读
第四集 知语云智能科技无人机反制威廉希尔官方网站 与应用--无人机的组成与工作原理
科技的视角,深入探讨无人机的组成与工作原理,为您揭开无人机飞行的神秘面纱。
一、无人机的组成结构
无人机主要由机身、动力系统、飞控系统、传感
发表于 03-12 11:28
第一集 知语科技无人机反制威廉希尔官方网站 与应用--无人机的定义与分类
了解无人机反制威廉希尔官方网站
与应用,为您揭开这一神秘领域的面纱。
一、无人机威廉希尔官方网站
概述
1 无人机的定义与分类
无人机,即无人驾驶
发表于 03-12 10:42
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
的飞行轨迹和意图,及时发出预警信息。
在应对无人机威胁方面,知语云智能科技的无人机防御系统采用了多种威廉希尔官方网站
手段。一方面,系统可以通过无线电干扰威廉希尔官方网站
,对目标无人机进行信号干扰,迫使其返航
发表于 02-26 16:35
无人机全景监测:空域管理的新革命
带来了新的突破。
一、无人机全景监测威廉希尔官方网站
概述
无人机全景监测威廉希尔官方网站
结合了无人机飞行威廉希尔官方网站
和高分辨率图像处理威廉希尔官方网站
,通过搭载在无人机上的高清摄像头,
发表于 02-20 15:23
四旋翼无人机飞行原理【其利天下无人机方案开发】
无人机行业的近年蓬勃发展,宛如一片璀璨的新星汇聚成的辉煌星空。创新和科技的融合将无人机推向生活的前沿,成为引领时代的先锋。这是一场风起云涌的科技巨变,为我们描绘出了一个崭新而引人入胜的无人机时代。
下面我们针对生活中常见的四旋






 工商网监
工商网监
评论