 NASA的机器人航天器OSIRIS-REx实现了对小行星贝努的历史性着陆
NASA的机器人航天器OSIRIS-REx实现了对小行星贝努的历史性着陆
据麦姆斯咨询报道,10月20日是行星科学研究进程中令人兴奋的一天,因为美国国家航空航天局(NASA)的机器人航天器OSIRIS-REx实现了对小行星贝努(Bennu)的历史性着陆,以距地球2亿英里(3.34亿公里)的精确操作来收集岩石和尘土样本——这是NASA首次执行小行星表面取样任务。更重要的是,这些富含碳的样本预计将在2023年9月返回地球,相当于给人类带来“一张太阳系的婴儿照片”。这颗小行星被视为潜在威胁天体,是有可能会撞击地球的小天体之一。
小行星贝努(Bennu)
OSIRIS-REx航天器接近行动从慢慢靠近到最后离开,全程持续了4个多小时,OSIRIS-REx航天器在美国东部时间20日下午6时11分确认与小行星贝努(Bennu)表面成功接触。在接触期间,航天器的特殊设备从小行星表面收集了所需岩石。这是3.3米机械臂末端的一个圆柱形装置,其“轻拍”南丁格尔陨石坑上的一个小点,持续几秒钟,释放出氮气,吹起一堆小行星碎片中的小颗粒,取样再收回到OSIRIS-REx内部。实际上,这真正的接触只有几秒钟,因此仍是在6时11分,航天器离开了小行星的表面。它将乖乖地退到安全距离,留待科学家评估它收集了多少物质。美国国家航空航天局团队成员在转播中称:“这是历史性的事件。”美国国家航空航天局确信航天器完成了这项任务且表现出色,稍后地面将收到所获取样本的确切重量以及接近小行星时的图像。美国国家航空航天局希望能拿到60克的样本,但他们表示,就算少个一两克,也不至于就不让航天器“回家”。
艺术家描绘的OSIRIS-REx航天器
回顾历史:经过十年的准备,2016年9月8日耗资8亿美元的OSIRIS-Rex成功发射,并于2018年12月到达近地小行星贝努(Bennu)附近。在过去的20个月中,OSIRIS-REx对该小行星进行了研究,以确定在哪里取样以及如何安全地进行取样。Teledyne Technologies公司提供了对任务至关重要的数字“眼睛”。该公司的成像威廉希尔官方网站
及设备在整个任务过程中运行良好,利用CCD相机拍摄可见光图像,通过激光雷达(LiDAR)测量表面拓扑结构,并使用“可见光-红外”光谱法评估表面材料成分。
OSIRIS-REx是“Origins, Spectral Interpretation, Resource Identification, Security, Regolith Explorer”的缩写词,含义是“太阳系起源、光谱解析、资源识别、安全保障、小行星风化层探索者”。这是一项由美国国家航空航天局进行中的小行星研究和采样返回任务。该任务有望使科学家进一步了解太阳系的形成与演化,包含行星形成初期阶段和导致地球上生命形成有机化合物的来源。OSIRIS-REx是美国国家航空航天局的新疆界计划中第三个行星科学任务,列在朱诺号和新视野号之后。由美国亚利桑那大学的天文化学家但丁·劳雷塔(Dante Lauretta)担任计划主持人(PI)。
小行星贝努(Bennu)的可见光图像采用Teledyne CCD图像传感器拍摄,如下图所示。
照片中显示了采用Teledyne CCD图像传感器拍摄的小行星贝努(Bennu)
照片中标有名为“Nightingale(夜莺)”的取样点。该取样点的图像上覆盖着OSIRIS-REx航天器的图形,表明目标着陆地点被危险的障碍物包围。该照片采用Teledyne CCD图像传感器拍摄。
小行星贝努(Bennu)比任何人想象的都要危险。这颗500米宽的小行星(比纽约市433米高的帝国大厦稍大一点)表面上有很大的巨石,其中最大的一颗是58米宽、22米高!当航天器着陆小行星表面时,任何较大的巨石都可能损坏航天器。OSIRIS-REx航天器上的一个至关重要的仪器是激光雷达系统,它在三个维度(3D)上测量小行星贝努(Bennu)表面拓扑结构,精度为10厘米,而着陆点和采样点的测量精度达到1厘米。Teledyne为OSIRIS-REx航天器提供两个激光雷达。
通过激光雷达系统的2000万次测量生成的结果:小行星贝努(Bennu)三维视图。激光雷达系统通过向小行星发射激光脉冲并测量激光从小行星表面反弹并返回到仪器所需的时间来获得距离测量值。
从小行星贝努(Bennu)取样的OSIRIS-REx航天器的艺术家概念图。Teledyne激光雷达绘制了小行星的岩石地图,使得航天器能够避开危险。
但是在哪里采样呢?位置选择取决于小行星表面材料的成分。化学成分由光谱仪测定,OSIRIS-REx航天器搭载的光谱仪将可见光和红外光散布成数百种“颜色”。由于每种元素、分子和矿物都有独特的光谱“指纹”,因此分光光度计会评估表面成分,以便对最具有科学价值的部位进行采样。该光谱仪中的Teledyne可见光-红外探测器用于分析小行星表面光谱信息。
Teledyne执行主席Robert Mehrabian表示:“Teledyne很荣幸能成为OSIRIS-REx任务的合作伙伴,我们的数字成像部门提供了几种成像和光谱威廉希尔官方网站
。“我们对这一任务的贡献体现了Teledyne对从海底到深空的探索和发现的承诺。”
以下内容提供了有关仪器和Teledyne图像传感器威廉希尔官方网站
的更多信息:
(1)OSIRIS-REx航天器的相机套件(OCAMS)由三个相机组成,它们在可见光下对小行星贝努(Bennu)拍照,绘制整个小行星的地图,以帮助确定取样地点。这些相机记录充满危险的关键采样事件。OCAMS使用了Teledyne DALSA CCD图像传感器,该传感器对低光照敏感,并且不受太空辐射的影响。OCAMS为其他仪器以及表面特征提供了背景信息。
(2)OSIRIS-REx航天器利用激光测高仪(OLA)对整个小行星进行三维(3D)测绘。OLA这是一种基于扫描式激光雷达(LiDAR)的仪器,可用于在采样点测量小行星地形,最高精度可达1厘米,这对于在充满危险的环境中成功完成采样操作显得至关重要。OLA中的两个激光雷达传感器由Teledyne Optech研发,已针对OSIRIS-REx任务的不同需要进行了优化:一个高功率激光雷达可在0.6至4.7英里的距离内进行测绘,而一个低功率激光雷达可在小于0.6英里的距离内进行测绘。此外,激光雷达还用于支持导航和重力分析。
(3)OSIRIS-Rex航天器的“可见光-红外”光谱仪(OVIRS)可测量来自小行星贝努(Bennu)的可见光和红外光,并且对从蓝色(0.4微米波长)到中红外(4.3微米波长)的波长非常敏感。OVIRS通过将光分成其组成波长来测量小行星表面的光谱。小行星贝努(Bennu)的光谱图使科学家能够确定表面的矿物和有机物质含量,这些数据对于确定从何处收集带回地球的样本是至关重要的。OVIRS中的可见光-红外探测器由Teledyne Imaging Sensors提供,类似于美国国家航空航天局的轨道碳观测卫星中使用的探测器——它可以精确地监测地球大气中的二氧化碳。
责任编辑:lq
-
机器人
+关注
关注
211文章
28418浏览量
207086 -
图像传感器
+关注
关注
68文章
1902浏览量
129549 -
航天器
+关注
关注
0文章
195浏览量
20862
原文标题:Teledyne激光雷达和图像传感器助力美国航天器探索小行星贝努
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
焊接机器人在航天领域的应用
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
NASA已经启动Psyche的电动霍尔推进器
ESA即将进行Hera任务测试,旨在保护地球免受小行星撞击
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
NASA研究团队低调训练机器狗,有望在月球表面行走
FMEA与机器人:如何确保机器人威廉希尔官方网站 的可靠性与安全性
星舰试飞失利,马斯克展望“生命多行星化”
美国私企"奥德修斯"登月失败,着陆腿断裂
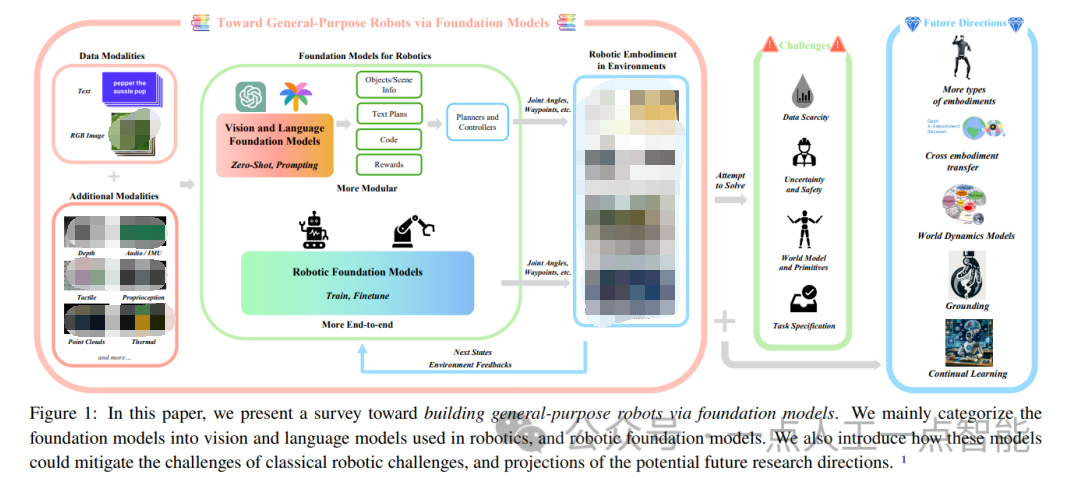
基础模型能为机器人带来怎样的可能性?





 工商网监
工商网监
评论