 波士顿动力足立式机器人的自我回正方法
波士顿动力足立式机器人的自我回正方法
波士顿动力发明的足立式机器人,借助于多个传感器以及控制算法,设计了具有低重心、易回正的硬件结构,实现了具有鲁棒性的机器人自我回正。
2019年9月,波士顿动力发布了关于机器狗 Spot 的视频,视频中展示了机器狗在各种地形中的出色避障表现,并且不仅可以避开障碍物,而且还可以在极端的环境中保持平衡。
我们知道,机器人尤其是四足以及双足机器人,其研发难点就在于如何保持机器人的平衡,虽然有了陀螺仪等多种传感器设备进行数据采集,但是要研发一套具有鲁棒性的平衡性系统并不容易,机器人在行走过程中极有可能会滑倒或者翻倒,而机器人要进行回正也非常困难且耗时。
因此,波士顿动力在15年6月24日申请了一项名为“用于机器人自我回正的系统和方法”的专利(申请号:201580033194.8),申请人为波士顿动力公司。
根据目前该专利公开的资料,让我们一起看看波士顿的这项机器人自我回正方法吧。
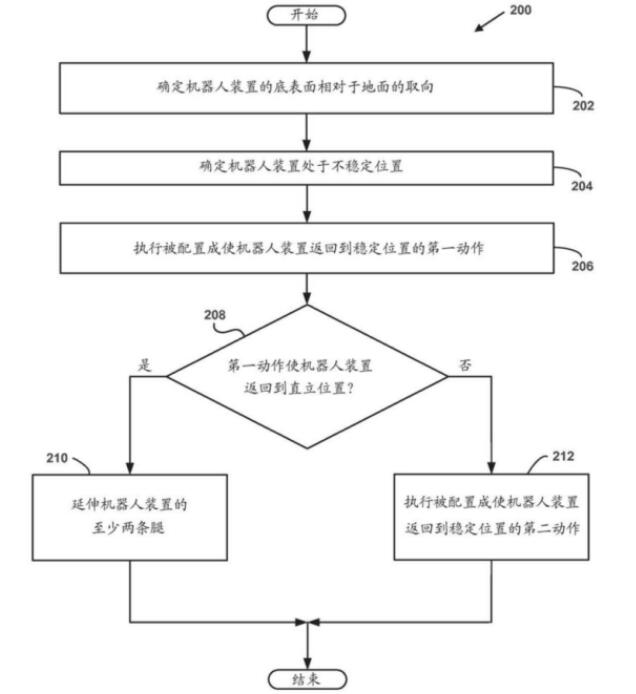
如上图,为这种回正方法的流程图,系统中的硬件主要包括:机械系统120、传感器系统130和控制系统140,而系统的实现也借助于多种传感器,例如:体载传感器、2D/3D传感器以及机械腿传感器等,机械腿传感器可以检测机械脚是否与地面接触。
首先,系统需要确定机器人装置的底表面相对于地面的取向,这是因为机器人在进行行走、俯仰、侧滚以及横摆等动作时,其与地面接触的部分会发生变化,因此可以利用这种变化进行下一步的判断。
当机器人处于不稳定的位置时,可以通过其质心的位置来确定机器人的脚的位置,根据机器人自身与脚的相对位置关系,就可以判断机器人是否可以进行站立,从而恢复到稳定的状态,对于四足机器人来说,如果想要恢复到稳定状态,则需要不断调整腿部的位置,从而支撑身体重新站立起来,例如下图所示。
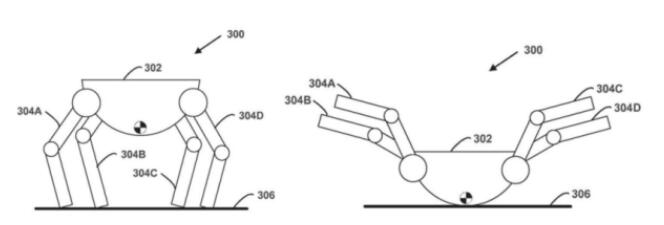
可以看到,上图左侧为机器人站立时的姿态,其为具有四条腿的四足机器人,质心靠近机器人的底表面,这样有利于机器人保持平衡。而其底部被设置为U形,这样就的好处在于当机器人位于其侧面上时,本体可以很自然的倾向于滚动到稳定位置。
而如上图右侧所示,为机器人处于不稳定状态,这种不稳定状态可以通过机器人身上布置的传感器进行检测,可以看到在这种情况下,机器人的腿部朝上,不能够维持正常的平衡状态。此时就需要借助于腿部的运动,来使机器人重新恢复稳定。
在确定机器人的脚的位置后,可以不断的调整机器人的腿部姿态,例如将第一侧上的每一条腿从第一位置移动到第二位置等,以此来使得机器人回正。最后还需要对最终状态进行检测,判断机器人是否回到了稳定位置,这也是由机器人身上分布的传感器来实现的。
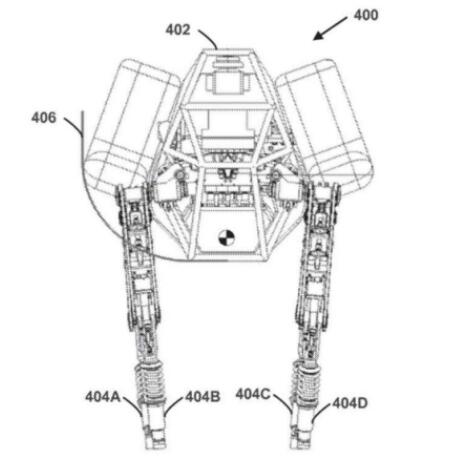
如上图,为完整的机器人结构示意图,其具有四条腿,本体具有较低的质心,底表面如上面介绍的那样具有轮廓406,可以使得机器人装置的重力势能基于机器人的稳定位置而减少,并且可以完成上述的自我回正动作。
以上就是波士顿动力发明的机器人自我回正方法,波士顿动力公司演示的机器人视频中,机器人均具有非常出色的自我回正表现,这依靠的不仅仅是例如上述这样的自我回正方法,在机器人程序设计中,也包含着非常多的平衡性算法,正是依靠着出色的算法控制以及精细的机器人结构设计,才能够带来如此出色的机器人,而波士顿动力的四足机器人也已经商用化,将给用户带来更大的价值。
责任编辑:YYX
-
机器人
+关注
关注
211文章
28398浏览量
206996 -
传感器系统
+关注
关注
0文章
37浏览量
12772 -
四足机器人
+关注
关注
1文章
90浏览量
15196
发布评论请先 登录
相关推荐
小鹏最新人形机器人!首发自研芯片,模特身材加持,已进厂打螺丝

Atlas转型电驱,纯电+AI正在加速通用人形机器人落地

开源项目!OpenCat—— 一个全能的平价四足机器人
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
在NVIDIA Isaac Lab中训练四足机器人运动

埃斯顿4.5亿增资子公司,加速机器人产业布局
直线电机生产厂家谈人形机器人迎来新奇点

波士顿动力人形机器人Atlas电动版亮相:前沿威廉希尔官方网站 迎来新时代






 工商网监
工商网监
评论