 通过H桥驱动感性负载的直流电机驱动设计方案
通过H桥驱动感性负载的直流电机驱动设计方案
什么是H桥?
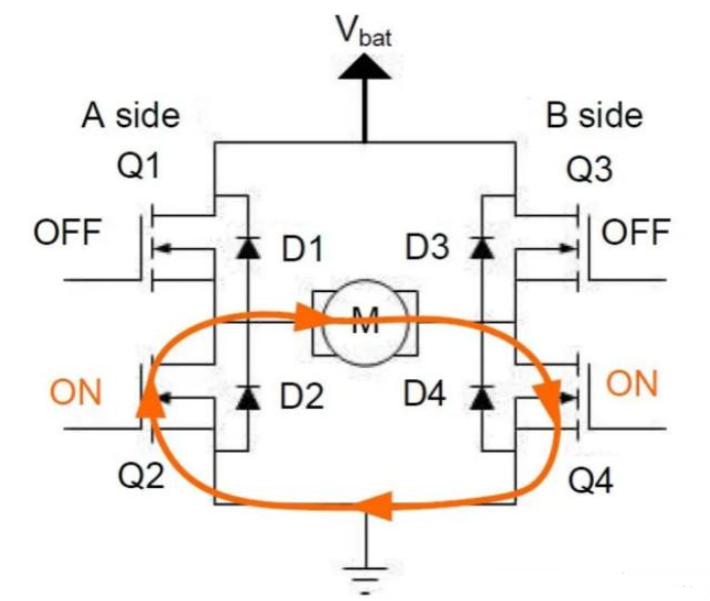
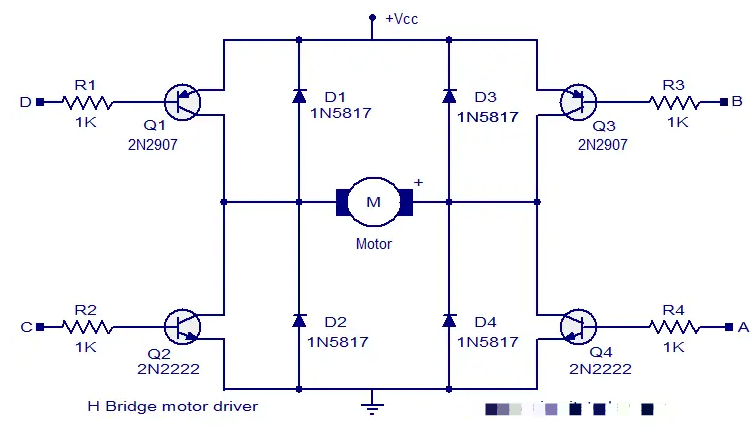
H桥是一个比较简单的电路,通常它会包含四个独立控制的开关元器件(例如MOS-FET),它们通常用于驱动电流较大的负载,比如电机,至于为什么要叫H桥(H-Bridge),因为长得比较像字母H,具体如下图所示;

这里有四个开关元器件Q1,Q2,Q3,Q4,另外还有一个直流电机M,D1,D2,D3,D4是MOS-FET的续流二极管;
开关状态
下面以控制一个直流电机为例,对H桥的几种开关状态进行简单的介绍,其中正转和反转是人为规定的方向,实际工程中按照实际情况进行划分即可;
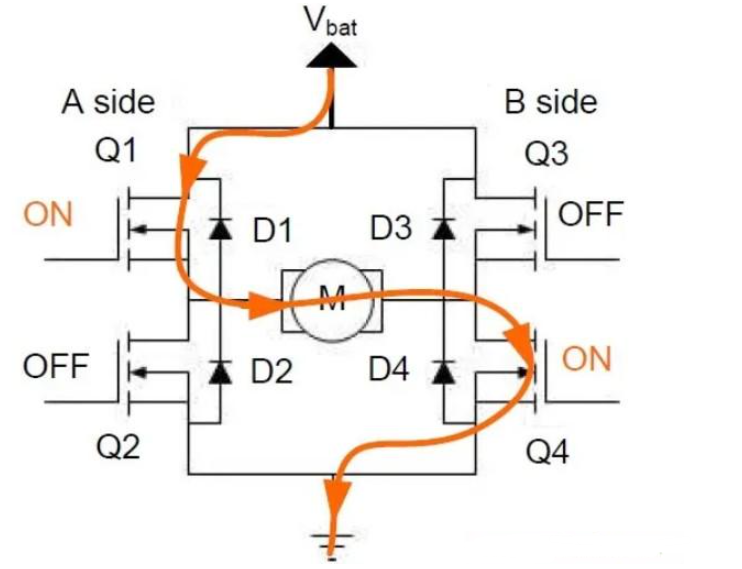
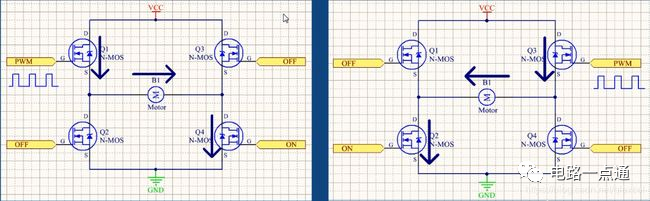
正转
通常H桥用来驱动感性负载,这里我们来驱动一个直流电机;
● 打开Q1和Q4;
● 关闭Q2和Q3;
此时假设电机正转,这电流依次经过Q1,M,Q4,在图中使用黄色线段进行标注,具体如下图所示;
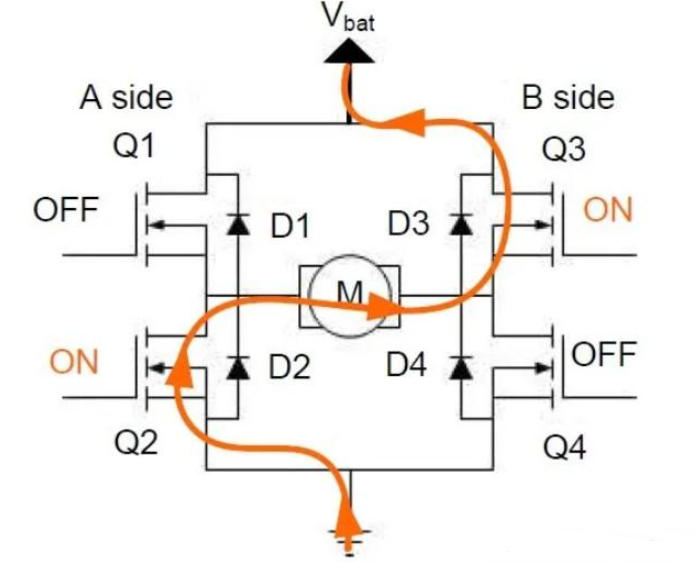
另外一种状态则是电机反转;此时四个开关元器件的状态如下;
● 关闭Q1和Q4;
● 打开Q2和Q3;
此时电机反转(与前面介绍的情况相反),这电流依次经过Q2,M,Q3,在图中使用黄色线段进行标注,具体如下图所示;
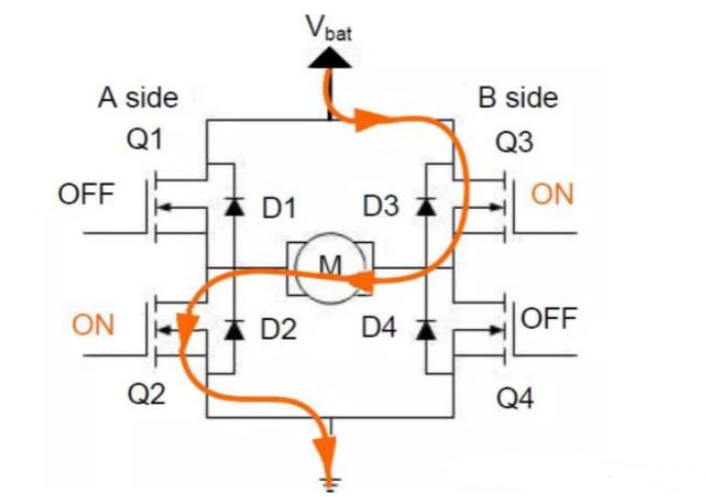
反转
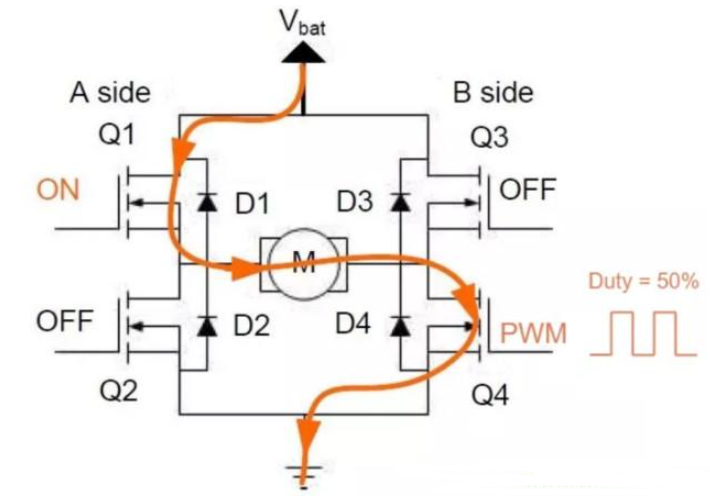
调速
如果要对直流电机调速,其中的一种方案就是;
● 关闭Q2,Q3;
● 打开Q1,Q4上给它输入50%占空比的PWM波形,这样就达到了降低转速的效果,如果需要增加转速,则将输入PWM的占空比设置为100%;
具体如下所示;
停止状态
这里以电机从正转切换到停止状态为例;
● 正转情况下;Q1和Q4是打开状态;
● 这时候如果关闭Q1和Q4,直流电机内部可以等效成电感,也就是感性负载,电流不会突变,那么电流将继续保持原来的方向进行流动,这时候我们希望电机里的电流可以快速衰减;
这里有两种办法:
第一种:关闭Q1和Q4,这时候电流仍然会通过反向续流二极管进行流动,此时短暂打开Q1和Q3从而达到快速衰减电流的目的;
第二种:准备停止的时候,关闭Q1,打开Q2,这时候电流并不会衰减地很快,电流循环在Q2,M,Q4之间流动,通过MOS-FET的内阻将电能消耗掉;
应用
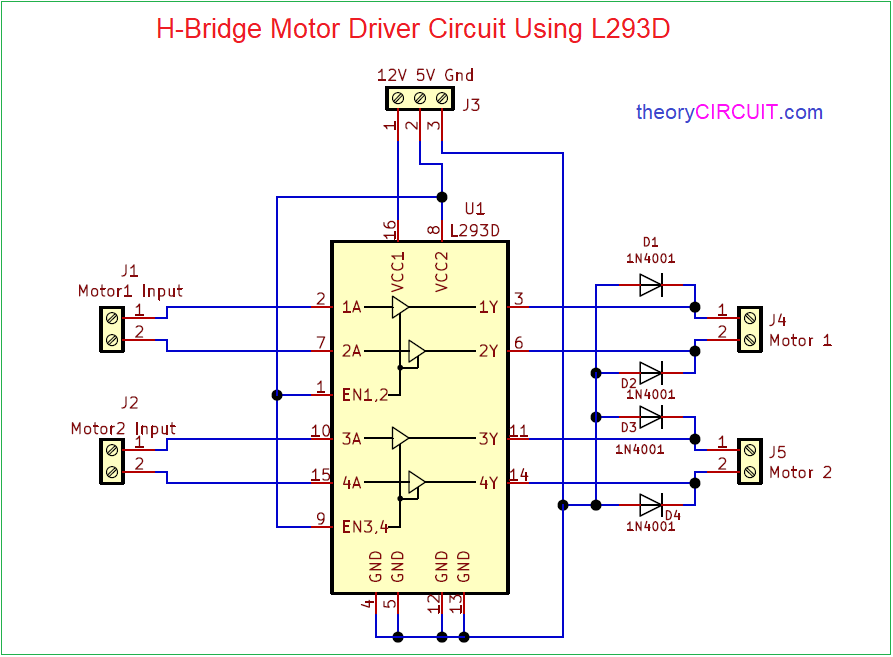
实际使用的时候,用分立元件制作H桥是很麻烦的,市面上已经有很多比较常用的IC方案,比如常用的L293D、L298N、TA7257P、SN754410等。接上电源、电机,通过输入控制信号就可以驱动电机了;
下面是某宝上的L298N模块,比较常见,对于新手玩家非常友好,接线也十分简单;

L298N模块
这个模块有一个板载5V稳压器,该稳压器可使用跳线的方式进行使能。
如果电机电源电压高达12V,我们可以启用5V稳压器,并且5V引脚可以用作输出,例如给Arduino板供电。
但是,如果电动机电压大于12V,则必须断开跳线,因为这些电压会损坏板载5V稳压器。
在这种情况下,5V引脚将用作输入,因为我们需要将其连接到5V电源,以使IC正常工作。
我们在这里可以注意到,该IC的电压降约为2V。因此,如果使用12V电源,则电动机端子上的电压约为10V,这意味着我们将无法从12V直流电动机中获得最大速度。
这里使用Arduino为例,这是网上找的一个Demo整体的框架如下图所示;
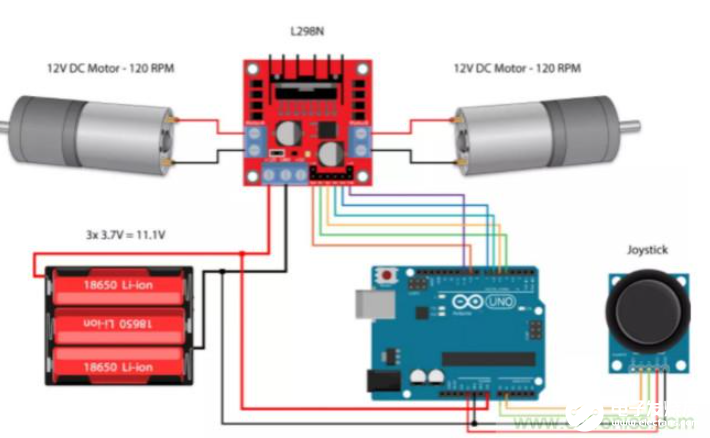
架构
#define enA 9
#define in1 6
#define in2 7
#define button 4
int rotDirection = 0;
int pressed = false;
void setup() {
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(button, INPUT);
// Set initial rotation direction
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
void loop() {
// Read potentiometer value
int potValue = analogRead(A0);
// Map the potentiometer value from 0 to 255
int pwmOutput = map(potValue, 0, 1023, 0 , 255);
// Send PWM signal to L298N Enable pin
analogWrite(enA, pwmOutput);
// Read button - Debounce
if (digitalRead(button) == true) {
pressed = !pressed;
}
while (digitalRead(button) == true);
delay(20);
// If button is pressed - change rotation direction
if (pressed == true & rotDirection == 0) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
rotDirection = 1;
delay(20);
}
// If button is pressed - change rotation direction
if (pressed == false & rotDirection == 1) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
rotDirection = 0;
delay(20);
}
}
简单描述一下:首先我们需要定义程序所需的引脚和变量。
在setup()中,我们需要设置引脚模式和电机的初始旋转方向。
在loop()中,我们先读取电位器值,然后将从中获得的值从0到1023变化,线性映射到PWM信号的0到255的值,将其从0到100%的占空比。
然后使用analogWrite()函数将PWM信号发送到L298N板的Enable引脚,该引脚实际上驱动电动机。
接下来,我们检查是否按下了按钮,如果是的话,我们将输入1和输入2的状态反置,从而改变电动机的旋转方向。该按钮将用作切换按钮,每次按下该按钮都会改变电动机的旋转方向。
某宝上这种小车很多,如下图所示;主控可以换成51单片机或者STM32,当然Arduino也没问题,使用L298N就可以快速搭建一个小车了;
某宝的小车
总结
本文简单介绍了H桥的原理,并以直流电机为例简单介绍了驱动的状态,整体比较简单,适合新手玩家,最后给出了基于Arduino和L298N的驱动示例,仅供参考。
编辑:hfy
-
稳压器
+关注
关注
24文章
4223浏览量
93769 -
控制信号
+关注
关注
0文章
164浏览量
11957 -
驱动电机
+关注
关注
9文章
410浏览量
30721
发布评论请先 登录
相关推荐

率能SS6952T 推杆,按摩椅单H桥电机驱动芯片

有刷直流电机是什么?有刷直流电机的工作原理是什么?
直流电机有哪些型号?如何分类的?
直流电机是什么?具有什么特点?
探索无刷直流电机驱动方案的威廉希尔官方网站 应用

推动高效能:东芝TB67H301FTG全桥直流电机驱动IC
H桥电机驱动电路电路图 H桥电机驱动电路的工作原理和控制方式
无刷直流电机驱动单元

使用PWM输出方式驱动有刷直流电机:PWM驱动的原理
H桥驱动直流电机电路原理介绍





 工商网监
工商网监
评论