 聊聊C2机器人的校零
聊聊C2机器人的校零
最近在校正C2机器人时遇到了一个小事故,机器人的EMT坏了,反复校正零点报校正超时.
今天我们就聊聊C2机器人的校零.
为什么要校零?
1.当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。
2.一旦机器人运动到机械零点,各个轴上的绝对编码盘的值就被保存下来了。
机器人零位校正后,可以用直角坐标系移动机器人或运行程序;同时机器人也知道软限位的位置.
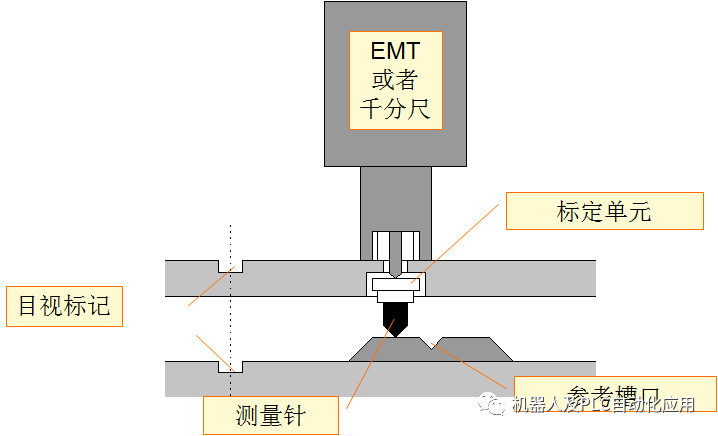
校零装置:
1.EMT
2.千分表
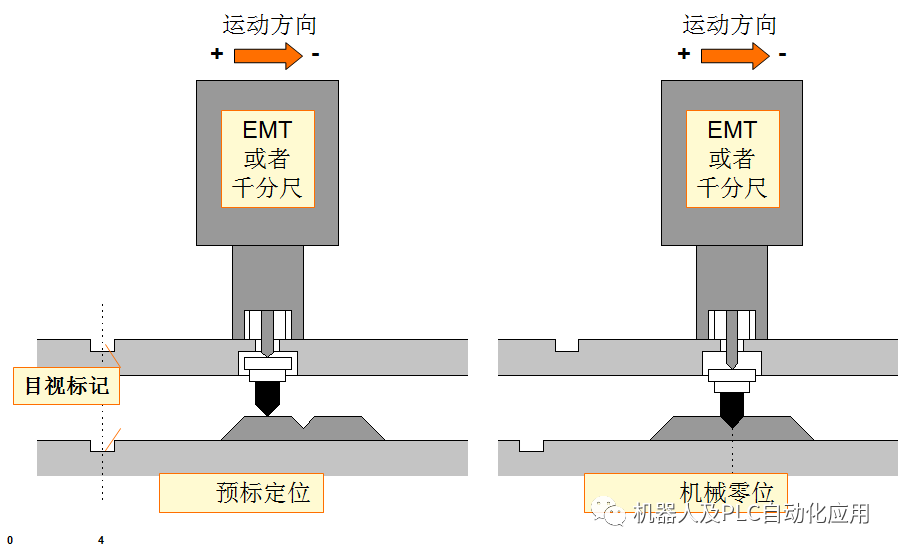
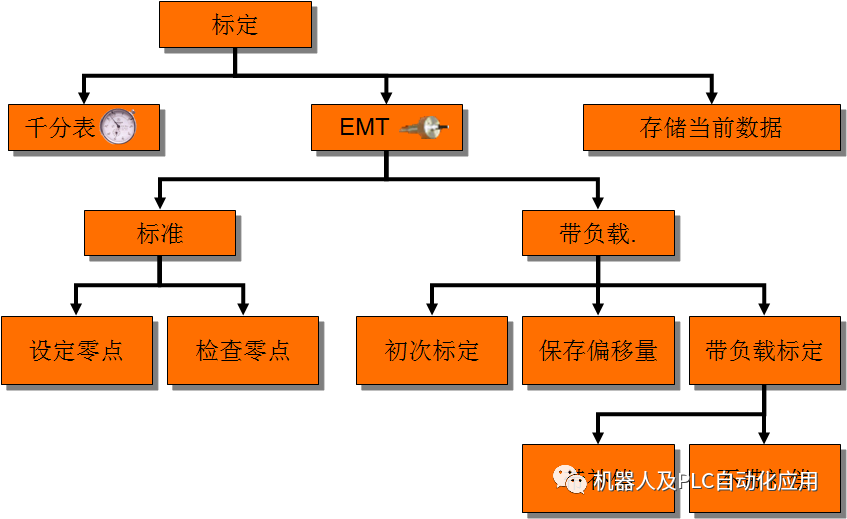
控制运行过程示意:
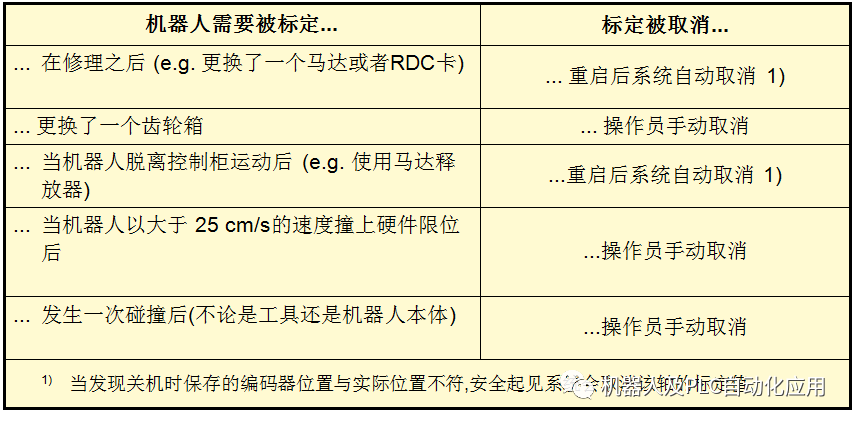
重新标定的情况:

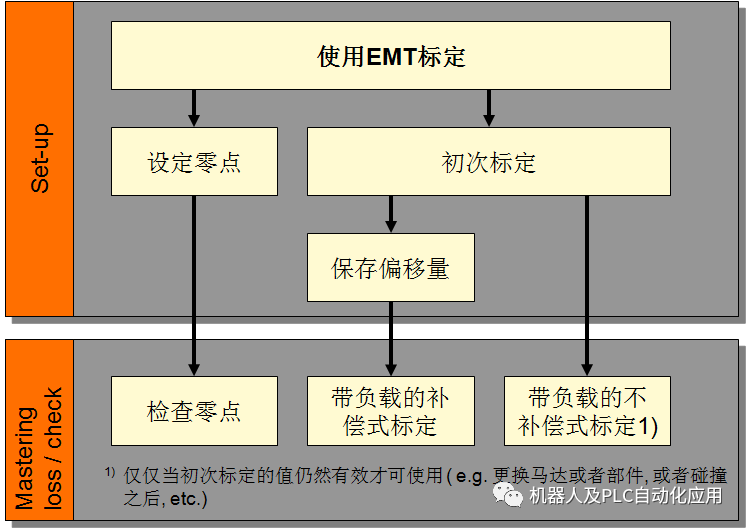
使用EMT标定:
•把需要标定的轴移动到预标定位 (如图所示白线位置)
•使用轴坐标系移动机器人各轴
•每个轴的标定是独立的

•从1轴开始往上标定
•每个轴总是从正向往负向运动
•仅仅在T1模式下!

•摘掉标定单元的保护盖
•接上EMT 并连上信号线(另一端连接到机器人底座上的连接盒接口 X32上)

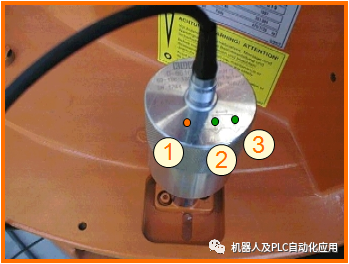
•EMT上有三个指示灯:
1. 红色 - 错误
2.绿色 - 下降沿
3. 绿色 - 上升沿
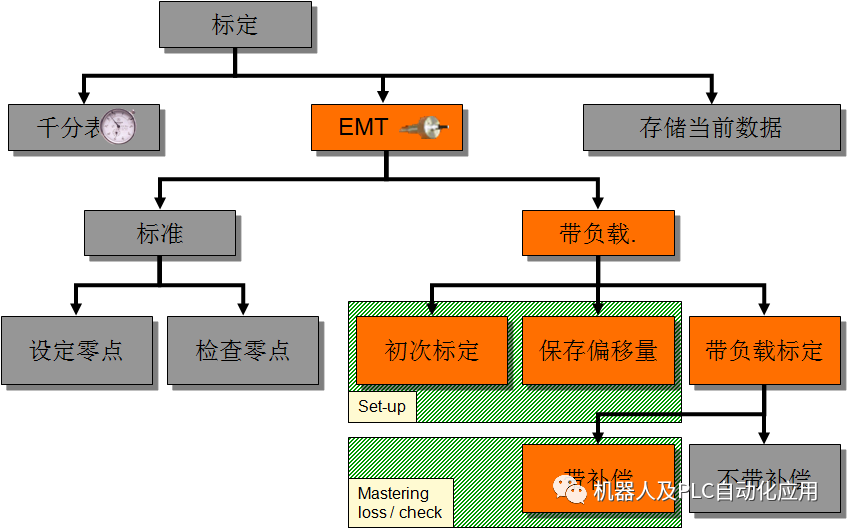
标定菜单:
对于精确定位机器人的标定:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28483浏览量
207436 -
机械
+关注
关注
8文章
1590浏览量
40634 -
自动校零
+关注
关注
0文章
2浏览量
5529
原文标题:KUKA-C2机器人-校零
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型威廉希尔官方网站
在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
重要。
书中还详细介绍了支持具身智能机器人的核心威廉希尔官方网站
系统,包括自主机器人计算系统、感知系统、定位系统及规划和控制系统。
本书共分5个部分。
第1部分(第1章和第2章)介绍具身智能机器人
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
,互联网行业占成熟经济体的GDP增长的21%,世界经济正面向数字经济转型的大趋势。具身智能机器人集成人工智能、高端制造、新材料等威廉希尔官方网站
,其核心在于通过智能体与环境的动态互动实现智能行为。
在第2章“具身
发表于 12-19 22:26
开源项目!用ESP32做一个可爱的无用机器人
/Kawaii-Useless-Robot
也可以“可爱的无用机器人”打包下载所有3D打印文件。
项目链接:https://www.instructables.com/Kawaii-Useless-Robot-2024-Edition/
项目作者:tobychui
*附件:可爱的无用
发表于 09-03 09:34
柔性机器人与刚性机器人区别与联系
、伸缩和变形。其结构通常模仿生物体的柔性和弹性特征。 刚性机器人:由刚性材料(如金属、硬质塑料等)制成,具有固定形状和结构,无法轻易变形。 2.运动方式 柔性机器人:通过柔性驱动(如气动、液压、形状记忆合金等)实现复杂的运动方

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
,简单快捷地调用合适的算法库,以提高开发效率,加快开发进程。
(2) 开源免费,架构精简
ROS系统是一个开源免费,架构精简的机器人操作系统。ROS被设计为尽可能精简,以便为ROS编写的代码可与其
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
、Zynq和摄像头为硬件基础,搭建了六自由度机器人视觉平台。
(2)设计了基于 FPGA的视觉检测方案。利用 西林提供的 HLS和CV库对从摄像头采集到的像素流进行实时处理,并设计了一套识别物块坐标
发表于 05-29 16:17
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
控制器作为工业机器人最为核心的零部件之一,对机器人的性能起着决定性的影响,在一定程度上直接影响着机器人的发展。那么机器人控制器的功能是如何实
发表于 05-11 09:40
其利天下威廉希尔官方网站 ·搭载无刷电机的扫地机器人的前景如何?
大的吸力,有效清除各类污渍和颗粒物。同时,低噪音设计使得机器在工作时不会打扰到家庭成员的休息或工作。此外,无刷电机的寿命更长,减少了用户的维护成本,提高了产品的性价比。
2.扫地机器人智能化程度的提升
发表于 05-05 15:03
DIY推荐!自制一个基于ESP32的沙画机器人
了机器人底板,建模了懒人转盘轴承和中央齿轮组合。
附上机器人组装的剖面和爆炸视图,好让大家更详细地了解它们如何组装。
步骤2:3D打印
我用黑色Polymaker ABS打印了所有
发表于 04-15 15:09
AMR仓储机器人如何赋能新零售?
AMR仓储机器人在新零售领域的应用为其赋能,实现了以下几个方面的重要功能: 提升仓储效率和速度:新零售模式下,订单量通常较大且多样化,要求仓储操作更加高效和灵活。AMR仓储机器人可以自





 工商网监
工商网监
评论