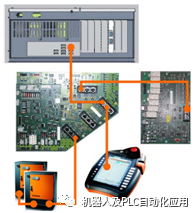
 机器人内部的控制总线KCB和系统总线KSB
机器人内部的控制总线KCB和系统总线KSB
机器人内部的控制总线KCB和系统总线KSB
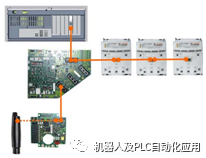
KCB总线:基于 EtherCat 的驱动总线,循环时间125 微秒,FSOE ( F ail S afe O verE therCat)网络安全校验。
KSB总线:基于 EtherCat 的总线,循环时间 1 毫秒,FSOE (F ail Safe O ver E therCat)网络安全校验。
那么EtherCat又是怎样的网络呢?
EtherCAT(以太网控制自动化威廉希尔官方网站 )是一个开放架构,以以太网为基础的现场总线系统,其名称的CAT为控制自动化威廉希尔官方网站 (ControlAutomationTechnology)字首的缩写。EtherCAT是确定性的工业以太网,最早是由德国的Beckhoff公司研发。
EtherCAT(Ethernet for Control AutomationTechnology)是一种基于以太网的开发构架的实时工业现场总线通讯协议,它于2003年被引入市场,于2007年成为国际标准,并于2014年成为中国国家标准。EtherCAT的出现为系统的实时性能和拓扑的灵活性树立了新的标准。
• 1)EtherCAT是最快的工业以太网威廉希尔官方网站 之一,同时它提供纳秒级精确同步。相对于设置了相同循环时间的其他总线系统,EtherCAT系统结构通常能减少25%-30%的CPU负载。
• 2)EtherCAT在网络拓扑结构方面没有任何限制,最多65535个节点可以组成线型、总线型、树型、星型或者任意组合的拓扑结构。
• 3)相对于传统的现场总线系统,EtherCAT节点地址可被自动设置,无需网络调试,集成的诊断信息可以精确定位到错误。同时无需配置交换机,无需处理复杂的MAC或者IP地址。
• 4)EtherCAT主站设备无需特殊插卡,从站设备使用可以由多个供应商提供的高集成度、低成本的芯片。
• 5)利用分布时钟的精确校准EtherCAT提供了有效的同步解决方案,在EtherCAT中,数据交换完全基于纯粹的硬件设备。由于通讯利用了逻辑环网结构和全双工快速以太网而又有实际环网结构,“主站时钟”可以简单而精确地确定对每个“从站时钟”的运行补偿,反之亦然。分布时钟基于该值进行调整,这意味着它可以在网络范围内提供信号抖动很小、非常精确的时钟。
EtherCATUDP(用户数据报协议)可以将EtherCAT协议封装为UDP/IP数据报文,这就意味着,任何以太网协议堆栈的控制均可编址到EtherCAT系统中,甚至还可以通过路由器使通讯跨接到其他子网。
EtherCAT的协议有:
•EtherCAT实现以太网(EoE)
•EtherCAT实现文件存取(FoE)
•EtherCAT实现安全性(FSoE) 用于安全检测,安全验证。
EtherCAT是以太网现场总线但它使用地址号分配而不是PN网络所使用IP地址和名称。
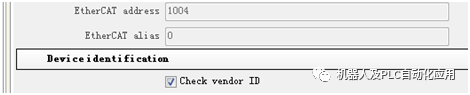
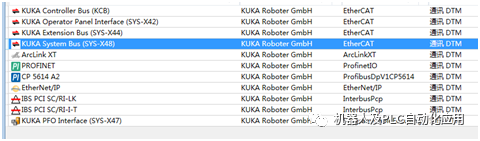
EtherCAT站点分配
PN网络的设备分配
因此实际上他们是不可能互换的,所以机器人内部网络和机器人附属设备组态网络是不可能出错的保证了机器人网络安全。
在国外除了KUKA也有人运用EtherCAT网络和PC制作了工业机器人也是强人!
EtherCAT故障状态显示:
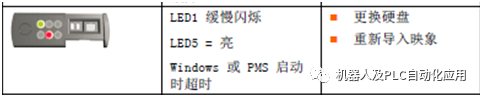
windows系统启动故障,内部KCB总线和KSB总线同时出现总线故障.

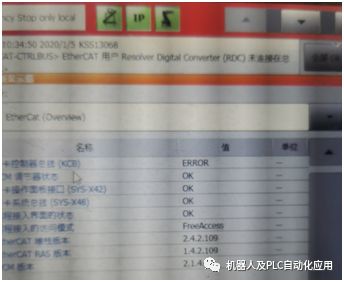
KCB控制总线故障,包括: KPP ,KSP,RDC 连线故障
KUKA内部Ethercat总线的诊断:
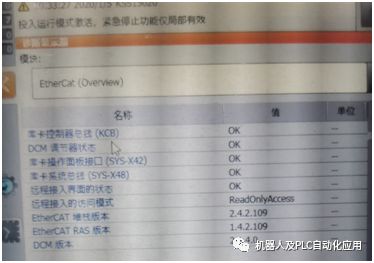
通过诊断显示器对Ethercat 内部总线状态进行检查。
下图为内部总线正常时的状态:
下图为内部总线KCB断网时的状态:
-
机器人
+关注
关注
211文章
28390浏览量
206950 -
网络安全
+关注
关注
10文章
3156浏览量
59708 -
总线
+关注
关注
10文章
2878浏览量
88056
原文标题:KUKA内部EtherCAT总线及故障诊断
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
【CAN总线知识】为何总线“镰刀”波形频频发生?

前端总线是属于什么总线
8086的系统总线能否直接与外设相连
Modbus 转 Profinet 网关如何适配机器人内部协议
三菱伺服用什么总线控制
如何使用PLC控制机器人
简述工业机器人控制系统的特点
机器人控制系统的基本单元有哪些
机器人控制系统按控制方法可哪些种类
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案






 工商网监
工商网监
评论