 电伺服焊接控制器握手程序用法分析
电伺服焊接控制器握手程序用法分析
适用版本KUKA 8.3系统
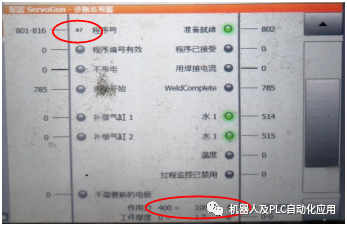
用于电伺服焊钳在调用程序前的自我检查与焊接控制器的通讯,即我给你程序序号调用91焊程序后,焊接控制器给力值400到机器人机器人反馈给焊接控制400的IO信号。用以判断通讯的好坏,数值传输的准确性,起到监控的作用!
接口故障,会触发A789(重置步进触点错误)进行故障复位,重新进行连接,连接后才能进行焊接程序的发出。
下面让我们详细分析一下:
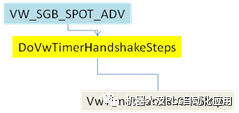
在轨迹预执行中调用,判断通讯连接情况。
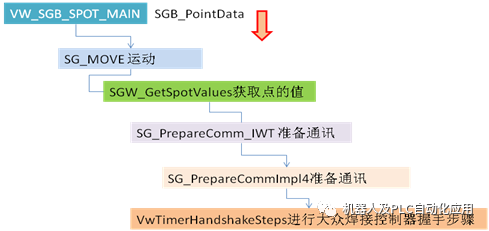
在轨迹点处再次进行判断调用。

SG_CheckProgNum_WT[1]:91有效检查程序号
每次焊接都要用到的握手程序91,BOSCH力值是400
大众焊接控制器握手步骤传送程序号
VwTimerHandshakeSteps(PrepCommStep, Point_DATA, timeOutextension)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
16361浏览量
178060 -
焊接
+关注
关注
38文章
3135浏览量
59767 -
伺服
+关注
关注
16文章
651浏览量
40965
原文标题:VwTimerHandshakeSteps-电伺服焊接控制器握手程序用法分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
恒功率脉冲焊接控制器的创新应用与优势分析
能耗的效果。而恒功率脉冲焊接控制器作为这一威廉希尔官方网站
的关键组成部分,不仅能够确保焊接过程的稳定性和重复性,还为焊接工艺的优化提供了新的可能。本文将从恒功率脉冲

精密逆变焊接控制器的创新应用与未来发展
精密逆变焊接控制器作为现代焊接威廉希尔官方网站
中的关键组成部分,其创新应用不仅提升了焊接质量,还极大地提高了生产效率和安全性。随着科技的发展,精密逆变焊接
多频点焊控制器的创新应用与优势分析
控制器的基本原理出发,探讨其在不同领域的创新应用,并分析其相对于传统点焊控制器的优势。
多频点焊控制器通过使用多个频率的电流进行焊接,
恒流恒压焊接控制器的精准应用与优势分析
恒流恒压焊接控制器在现代工业生产中扮演着至关重要的角色,特别是在精密制造领域,其精准的应用和显著的优势使其成为众多企业的首选。本文将深入探讨恒流恒压焊接控制器的具体应用及其带来的多方面
直流变频焊接控制器:先进威廉希尔官方网站 在焊接领域的革新应用探索
如何重塑焊接工艺流程,以及其在实际生产中的价值体现。
首先,我们来剖析直流变频焊接控制器的基本原理与特点。相较于传统的焊接控制方式,直
逆变直流焊接控制器:创新威廉希尔官方网站 在焊接行业的高效应用探索
随着工业生产与工程威廉希尔官方网站
的不断发展,创新威廉希尔官方网站
在各个领域的应用日益深入,特别是在焊接行业中,新型的逆变直流焊接控制器成为了推动行业发展的重要动力。这种控制器以其独特的性能优势和高效的
伺服控制器的常见故障及解决方法
伺服控制器作为工业自动化领域的核心部件,其稳定性和可靠性对于整个系统的运行至关重要。然而,在实际应用中,伺服控制器也会遇到各种故障。本文将对伺服
西门子PLC与伺服控制器如何通讯
在工业自动化领域中,西门子PLC(Programmable Logic Controller,可编程逻辑控制器)与伺服控制器之间的通讯是实现高效、精确控制的关键环节。本文旨在详细阐述西
伺服控制器与PLC的区别
在现代工业自动化领域中,伺服控制器(Servo Controller)和可编程序控制器(Programmable Logic Controller,简称PLC)是两个至关重要的控制设备
伺服控制器的工作原理和基本结构
伺服控制器,作为工业自动化和精密控制领域的核心部件,其工作原理和基本结构对于理解和应用伺服系统至关重要。本文将详细阐述伺服
伺服电机控制器怎么调参数
伺服电机控制器参数调整是确保伺服系统正常运行和达到预期性能的关键步骤。本文将详细介绍伺服电机控制器的参数调整方法,包括基本原理、常见参数、调
伺服控制器编码器反馈数值为负数怎么回事
伺服控制器编码器反馈数值为负数是一个相对复杂的问题,涉及到多个方面。在这篇文章中,我们将从以下几个方面进行详细分析:伺服





 工商网监
工商网监
评论