 KUKA机器人电伺服焊钳力的建立过程
KUKA机器人电伺服焊钳力的建立过程
KUKA机器人组态电伺服焊钳,使用软件插件 "SERVOGUN.BASIC"
电机驱动简图:
X型焊钳
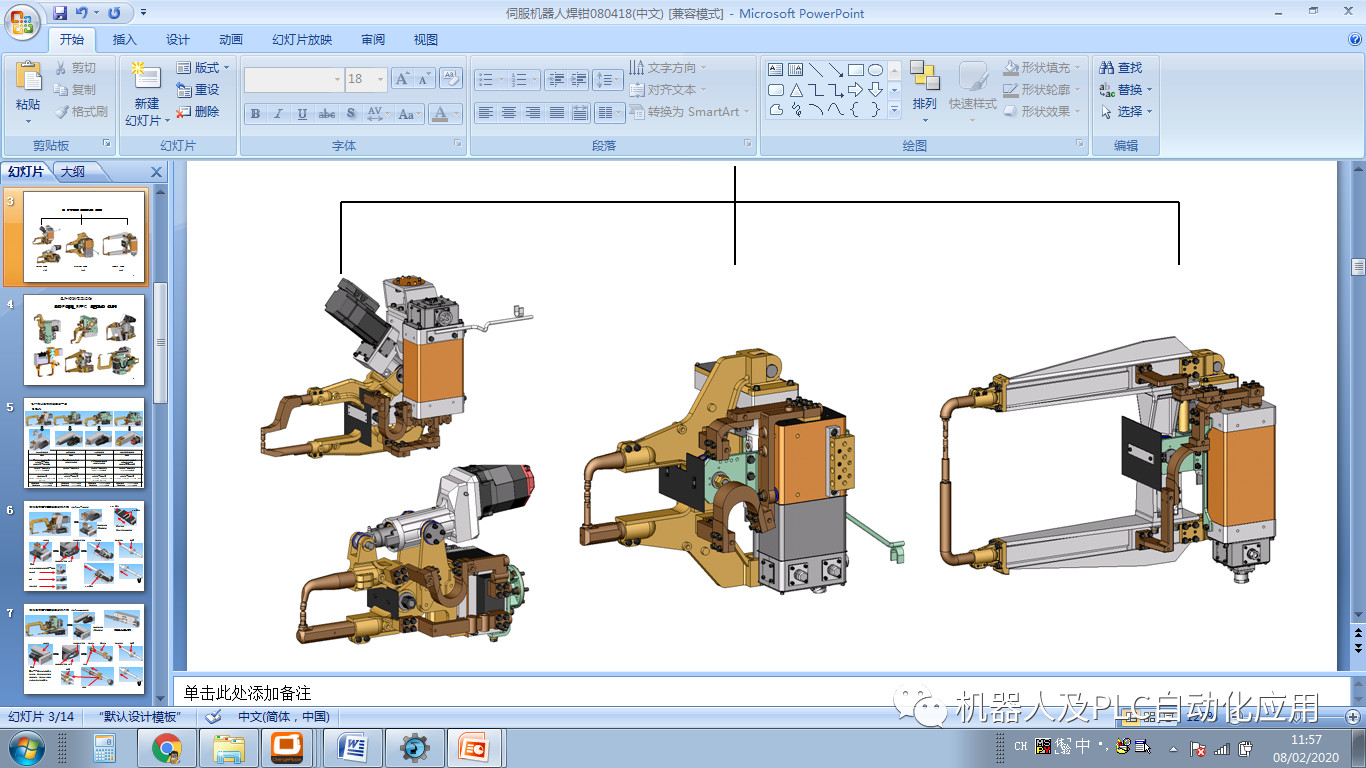
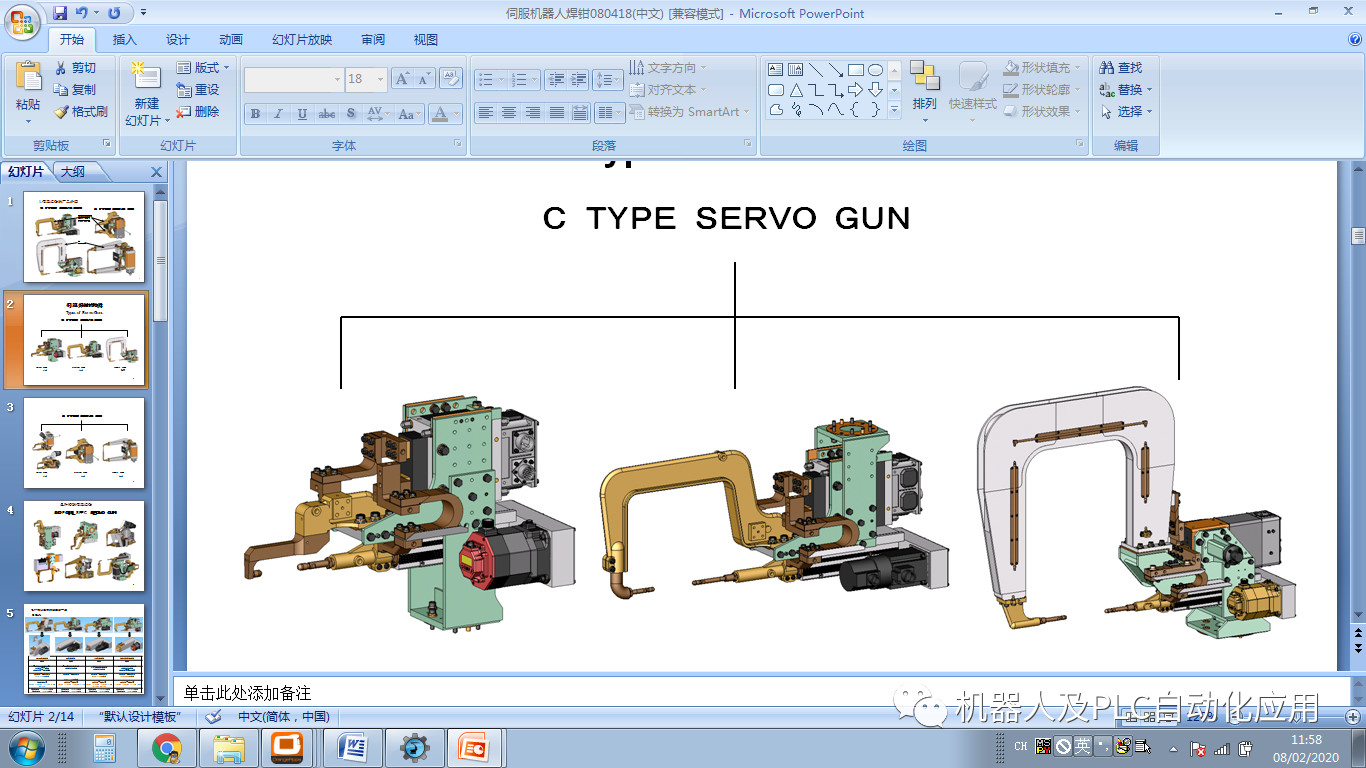
C型焊钳
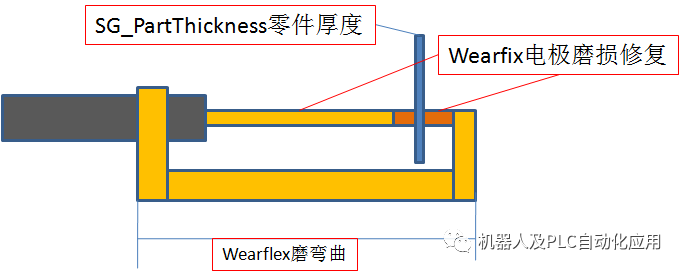
KUKA机器人常用控制变量:
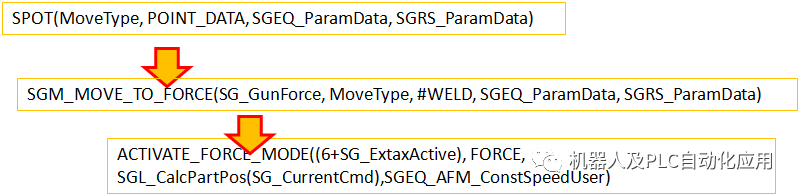
KUKA机器人控制力函数:
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)

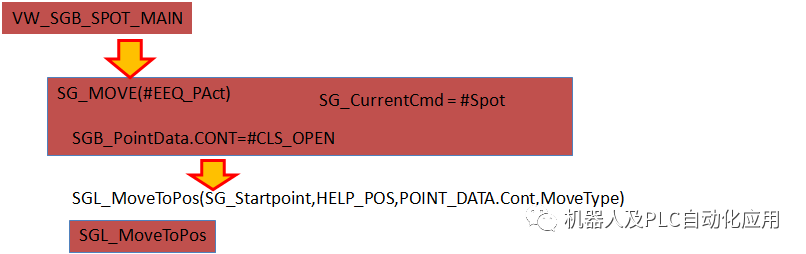
力的建立确定过程:
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P ;焊接点
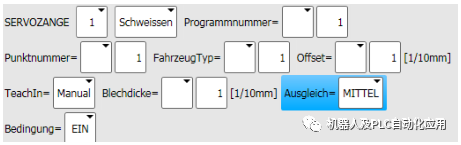
SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnummer= 5154 FahrzeugTyp= 60 Offset= 1[1/10mm] TeachIn= Auto Ausgleich= MITTEL Bedingung=EINUSER焊接程序
VW_SGB_SPOT_MAIN(TRUE,#SG_PTP,P10,1,99,5154,60,1,TRUE,0,ServoGun[1].CompType,#MEDIUM,0,0,0)执行后台焊接程序
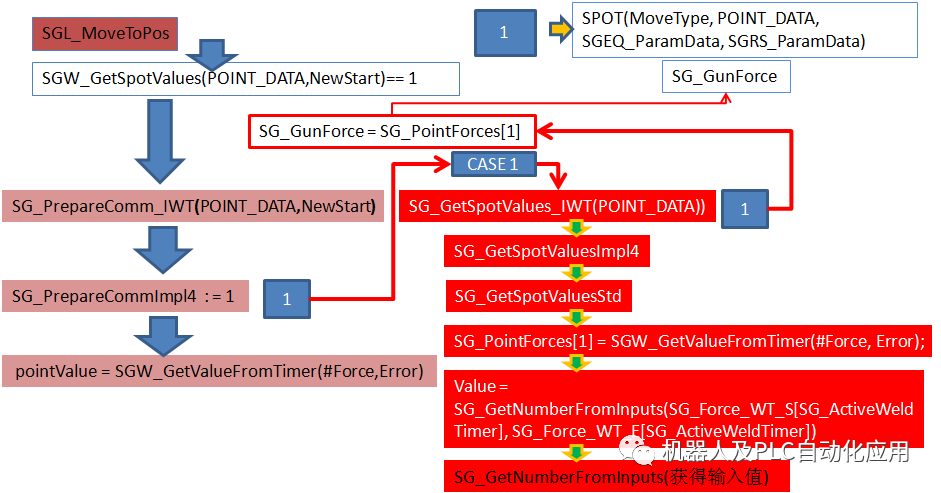
机器人的焊接控制器的通讯连接力的输入点
SG_Force_WT_S[1]=793起始字节
SG_Force_WT_E[1]=800结束字节
SG_GunForce= SG_PointForces[1]传递力值
将工作力值给入系统函数'ACTIVATE_FORCE_MODE'中实现力的控制
-
机器人
+关注
关注
211文章
28416浏览量
207063 -
焊接
+关注
关注
38文章
3134浏览量
59753 -
伺服
+关注
关注
16文章
651浏览量
40963
原文标题:KUKA 机器人电伺服焊钳力的建立过程
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Atlas转型电驱,纯电+AI正在加速通用人形机器人落地

伺服电机在机器人中的应用有哪些
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
智能升级:机器人焊钳修磨机VS传统修磨机,效率与质量的双重飞跃

伺服控制机器人的控制方式有哪些
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
Al大模型机器人
六维力传感器——人形机器人的力觉







 工商网监
工商网监
评论