 嵌入式Linux的驱动编写入门资料详细说明
嵌入式Linux的驱动编写入门资料详细说明
1.引言
很早之前就有网友建议写一篇关于Linux驱动的文章。之所以拖到现在才写,原因之一是我之前没有在工作中遇到需要自己手动去写驱动的需求,主要是现在Linux内核驱动的支持已经比较完善了,另外一个原因是自己水平实在有限,不敢写驱动这个话题,Linux驱动里涉及到的东西太多了,很多年前专门买过驱动相关的书籍,厚厚的,看的云里雾里。借此机会,在这里给大家做个非常非常入门级的介绍,希望对大家有所帮助。
2.环境介绍
2.1.硬件
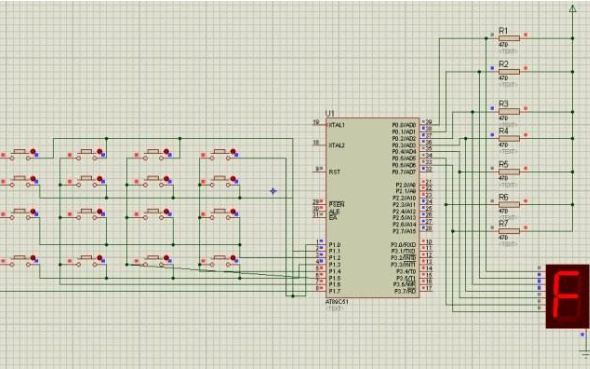
网上的一个第三方做的NUC972开发板,这里会用到板子上的MPU6050传感器芯片,相关部分原理图如下:
2.2.软件
1) Uboot不需要改动
2) Kernel不需要改动
3) Rootfs不需要重新编译
3.最简单的驱动例子
第1步:编写hello.c
#include
这是一个简单的内核模块程序,可以动态加载和卸载。模块加载的时候系统会打印module init success,模块卸载的时候系统会打印module exit success。
开头的两个头文件,init.h 定义了驱动的初始化和退出相关的函数,module.h 定义了内核模块相关的函数、变量及宏。然后module_init和module_exit是模组加载和卸载相关的两个函数,
第2步:编写Makefile
obj-m := hello.oPWD := $(shell pwd)KDIR :=/home/topsemic/nuc972/kernel/NUC970_Linux_Kernel-master/all: $(MAKE) -C $(KDIR) M=$(PWD)clean: rm -rf *.o *.mod.c *.mod.o *.ko *.symvers *.order *.a
注意:KDIR 取决于你自己Linux内核安装的位置,一定要设置正确,否则编译会报错。
第3步:编译
将hello.c和Makefile放在同一路径下进行编译,输入make即可。编译成功后,会在当前路径下生成hello.ko,这就是我们将要加载到内核的模块。
第4步:将生成的hello.ko放到板子上,然后登录板子输入:
insmod hello.ko
如果模块加载成功的话,可以查看模块加载情况,使用lsmod命令
并且可以查看内核打印的消息,使用dmesg命令,
rmmod hello.ko,用来卸载模块,使用dmesg命令可以看到相关输出信息
4.MPU6050驱动
本章以板子上的MPU6050 传感器为例,来介绍驱动的编写。由于板子上使用的是PE10和PE11,它们不是真正的I2C引脚,所以这里我们使用GPIO来interwetten与威廉的赔率体系 I2C时序。编写驱动前,首先需要下载被控制器件的datasheet,在官网 可以下载。
第1步:写驱动文件,我们这里在驱动文件里放了三个文件,分别为mpu6050.c、mpu6050bsp.c和mpu6050bsp.h
其中mpu6050.c代码如下:
#include"mpu6050bsp.h"int MPU6050_MAJOR = 0;int MPU6050_MINOR = 0;int NUMBER_OF_DEVICES = 2; struct class *my_class;struct cdev cdev;dev_t devno;/*************************************************************************************/ #define DRIVER_NAME "mpu6050"int mpu6050_open(struct inode *inode,struct file *filp){u8 reg;reg=InitMPU6050();printk("mpu6050:%d\n",reg);return nonseekable_open(inode,filp);}long mpu6050_ioctl(struct file *filp,unsigned int cmd,unsigned long arg){switch(cmd){default:return -2;}return 0;}int mpu6050_read(struct file *filp, char *buffer,size_t count, loff_t *ppos){mpu_get_data();return copy_to_user(buffer, mpu_data, 14);}int mpu6050_write(struct file *filp, char *buffer, size_t count, loff_t *ppos){return 0;}struct file_operations mpu6050_fops = {.owner = THIS_MODULE,.read = mpu6050_read,.write = mpu6050_write,.open = mpu6050_open,.unlocked_ioctl = mpu6050_ioctl,};/**************************************************************************************/static int __init mpu6050_init(void){ int result; devno = MKDEV(MPU6050_MAJOR, MPU6050_MINOR); if (MPU6050_MAJOR) result = register_chrdev_region(devno, 2, "mpu6050"); else { result = alloc_chrdev_region(&devno, 0, 2, "mpu6050"); MPU6050_MAJOR = MAJOR(devno); } printk("MAJOR IS %d\n",MPU6050_MAJOR); my_class = class_create(THIS_MODULE,"mpu6050_class"); //类名为 if(IS_ERR(my_class)) { printk("Err: failed in creating class.\n"); return -1; } device_create(my_class,NULL,devno,NULL,"mpu6050"); //设备名为mpu6050 if (result<0) { printk (KERN_WARNING "hello: can't get major number %d\n", MPU6050_MAJOR); return result; } cdev_init(&cdev, &mpu6050_fops); cdev.owner = THIS_MODULE; cdev_add(&cdev, devno, NUMBER_OF_DEVICES); printk (KERN_INFO "mpu6050 driver Registered\n"); return 0;} static void __exit mpu6050_exit (void){ cdev_del (&cdev); device_destroy(my_class, devno); //delete device node under /dev//必须先删除设备,再删除class类 class_destroy(my_class); //delete class created by us unregister_chrdev_region (devno,NUMBER_OF_DEVICES); printk (KERN_INFO "char driver cleaned up\n");} module_init (mpu6050_init );module_exit (mpu6050_exit ); MODULE_LICENSE ("GPL");
上述代码整体结构和第3章介绍的hello.c类似,不过为了支持对字符设备的操作,多了open/write/read的几个函数实现。
mpu6050bsp.c由于内容较多,不把代码贴到这里了,大家一看就明白了,它就是用gpio来模拟i2c功能,实现寄存器操作功能。mpu6050bsp.h主要是相关寄存器定义。
第2步:编译,然后把ko文件放到板子,insmod mpu6050d.ko 。模块如果加载成功,在/dev目录下可以看到mpu6050的设备名出现。
第3步:写个应用程序mpu6050app.c,
#include
编译arm-linux-gcc mpu6050app.c -o mpu6050app
第4步:将板子水平摆放朝上,运行例子结果如下,
我们来计算下z轴加速度和温度的实际数值。
因为驱动里AFS_SEL寄存器设置的值是2,所以对应量程8g。数字-32767对应-8g,32767对应8g。把32767除以8,就可以得到4096,即1g对应的数值。把从加速度计读出的数字除以4096,就可以换算成加速度的数值。上面我们从加速度计z轴读到的数字是3723,那么对应的加速度数据是3723/4096≈0.91g。g为加速度的单位,重力加速度定义为1g, 等于9.8米每平方秒。由于桌上不是很平,加上传感器自身误差,所以这个值是合理的。
再看看温度计算,从手册中可以看到如下的计算公式
上述的-2352计算后得到温度为29.6℃,注意这个温度不是环境温度,是芯片内部的温度,环境温度会比这个值略低。
由于我是在北京,冬天屋里有暖气,所以这个值也是合理的。
5.结束语
本期给大家介绍关于Linux驱动最简单的使用,可以看到驱动开发和应用开发还是有很大的差异,驱动需要关注底层,需要深入的阅读芯片的数据手册,同时也得具备内核的相关知识。市场上Linux应用开发人员相对更多,真正懂驱动的人相对较少,大部分集中在芯片原厂公司。推荐大家在实际做产品时尽量选择官方推荐的元器件,或者选择可以提供Linux驱动的元器件,以降低开发难度。
-
传感器
+关注
关注
2550文章
51056浏览量
753245 -
嵌入式
+关注
关注
5082文章
19115浏览量
304914 -
Linux
+关注
关注
87文章
11298浏览量
209382
发布评论请先 登录
相关推荐
详细说明如何配置嵌入式linux 的nfs开发环境

嵌入式Linux系统的移植研究

2020年嵌入式汽车威廉希尔官方网站 的重大变革详细说明
小白入门嵌入式Linux开发板,嵌入式linux驱动如何学?小白入门必看

嵌入式linux报警,嵌入式Linux下LED报警灯驱动设计及编程.doc





 工商网监
工商网监
评论