 dfrobot路虎5履带底盘简介
dfrobot路虎5履带底盘简介


产品简介
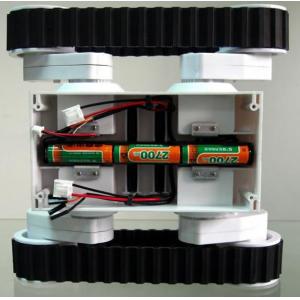
真正的“路虎”--可升降地盘+强劲动力履带2WD小车地盘。不管运行的路面有多么崎岖,不管坡度有多么的高,路虎小车都可以轻松搞定。眼见为实,大家可以参考以下视屏:
路虎5底盘扭力大、低噪声、控制简易、运动灵活、机动性能强劲的机器人底盘。底盘采用带电感的大扭力电机,经过斜齿轮与减速齿组变速后,让机器人拥有充足动力快速越障,电机和减速齿轮内置于底盘外部的支撑柱内,通过改变支撑柱和底盘的角度,就可以改变底盘的高度。
底盘稳定性强,橡胶履带富有弹性、减震耐磨性好、抓地摩擦力大,非常适合Arduino爱好者、各大中小学开展机器人普及教育使用,更适合学生用其开发参加全国大学生电子大赛。
还在用51单片机控制小车吗?你已经OUT了!!DFRobot为机器人爱好者推荐更多简单易用的Arduino的智能控制设备。Arduino是目前国际上非常流行的开源控制器,大量扩展设备和开源样例代码,大大降低了搭建智能小车的难度。以下是一些常用配件,如果你更多需求,请进入论坛或者致电咨询。
- DFRobot Romeo多合一控制器:集成了Arduino Leonardo控制器、传感器扩展板和2A双路电机驱动,使小车控制一步到位。
- APC220无线数传模块:遥控小车的利器,有效距离可达1公里
- 2300MAH镍氢电池:重量轻,电力足,为小车提供持久续航
- 数字红外开关和红外开关支架:简单可靠,小车避障必备
- 输入摇杆扩展板和DFRduino UNO V3.0(Arduino兼容)板:搭配APC220构成无线遥控手柄
- 充电器套装 (包括一个充电器,一个9V可充电电池,送优质9V电池扣)
- 尺 寸:245x225x74mm(长x宽x高)
- 高度范围:74mm-100mm之间调节
- 离地高度:21mm-50mm
- 电机供电电压:6-12V
- 最大速度:42cm/s(12V)
- 电机最大扭矩:10kg*cm
- 电机减速比:86.8 :1
- 爬坡能力:> 30度
- 有效载重:> 7.5Kg
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6085浏览量
35304 -
DFRobot
+关注
关注
4文章
1158浏览量
9518
发布评论请先 登录
相关推荐
斜三角履带底盘的制作
1.运动功能说明 斜三角履带底盘可以通过两侧履带的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能。另外,倾斜的履带也可以使其具有良好的越障效果。 前进与后退

履带机器人 金属底盘
` 本帖最后由 威凯-智控 于 2012-8-14 23:28 编辑
今天给大家分享一个全金属的履带机器人底盘准备最履带机器人的朋友们,可以一起交流一下机器人疯狂爱好者 让思维沸腾起来 让智慧行动起来 共同创造机器人的精彩!
发表于 08-14 23:25
履带底盘的结构部分
写在前面:看着网上那些履带底盘,怎么看怎么不舒服,还是决定自己做。这样就带来一个很大的问题,就是很多结构件都要用3D打印。我自己有3D打印机,下面不但会给出设计,还会给出实物照片。但是,对于没有3D
发表于 02-19 03:54
深度解析路虎全新发现底盘
路虎最近车型更新换代动作频繁,甚至彪悍硬派的发现系列也重新改头换脸大改款。全新一代发现在海外发布后,没过多久便进入了中国市场,引入速度非常迅猛。全新一代发现外形不再方正,变得更加圆润,车头更有家族式
【底盘大PK】路虎发现神行/凯迪拉克XT5
这一期的底盘解析,我们要来看看两款豪华SUV——路虎发现神行和凯迪拉克XT5,二者都是国产车型,价格范围都是在35-50万附近,配置空间表现都不差,而两个品牌也是二线豪华军团中的佼佼者


dfrobotDevastator履带机器人移动平台简介
Devastator Tank Mobile Platform 履带机器人是DFRobot 研制的机器人实验平台,该平台不但可以使用当前流行的Arduino控制器,也可以使用Raspberry pi等其他控制器控制。

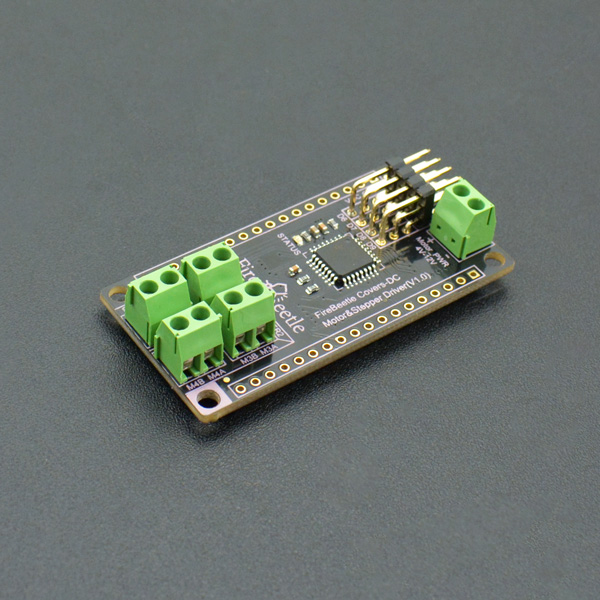
dfrobot四路电机驱动板简介
DFRobot FireBeetle萤火虫系列是专为物联网设计的低功耗开发组件。此款FireBeetle Covers-DC Motor&Stepper Driver模块,是针对FireBeetle
蓝牙遥控履带底盘行驶
1. 功能描述 本文提供的示例所实现的功能为:用手机APP遥控斜三角履带底盘样机实现移动,包括前进、停止、后退、原地左转、原地右转。 2. 电子硬件 在这个示例中,采用了以下硬件,请大家

小型双节履带底盘的制作
1.运动功能说明 双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过

正三角履带底盘的制作分享
1.运动功能说明 正三角履带底盘可以通过两侧履带的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能。同时,由于车身的正三角特性,它不惧怕前后方向上的翻车。 2.结构说明 该样机由

小型三节履带底盘的制作
双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过坑洼地面等功能。





 工商网监
工商网监
评论