 如何建立自己的BARBOT
如何建立自己的BARBOT
步骤1:从概念到现实
我的第一步是考虑我的可用资源。我有5个伺服器,一块14英寸乘14英寸的1/4英寸聚碳酸酯,Arduino,以及Lynxmotion的一些伺服器支架。(请从www.robotshop.ca/购买)
然后,我考虑了所需的功能:
白酒储液罐(我希望至少有3个容量至少为500ml的容器)
小玻璃杯托盘(我希望一次最多可装4张)
人机界面(选择控件)液体类型的选择要直观)
液体选择器(选择要分配的液体类型的机构)
分配量控制器(允许每次注入控制液体量的机构)
,当时的想法是直接使用机械臂并在其上连接一个液体分配机构,但是由于多种因素,这被证明很困难:首先,我没有合适的阀门尺寸,因此很难弄清楚如何将液体无间断地输送到手臂上的分配器。第二,我有1/4英寸的油管(在当地的硬件商店购买)重新),但不是硅树脂类型,因此不是很柔软(伺服将需要太多扭矩)。
下一个想法是使分配器固定不动,并使装有玻璃的托盘在其下方移动。这样做有几个优点:不需要机械的酒架,因为托盘可以在选定的酒容器下移动,并且主伺服器需要的扭矩较小,因为托盘是水平的,玻璃的重量(垂直作用)可以通过结构得到支撑。
下面的图像突出了一些想法,并逐渐发展到最后的草图。有趣的是Iknow AutoCAD和SolidWorks,但更喜欢绘制它们,因为我上床睡觉之前就把大部分想法都准备好了(我在床底准备了笔和纸专门用于此:P)。
步骤2:建立支撑结构。
我还剩下一块聚碳酸酯是我去年建造的水下相机保护壳最初,它是为我启动但从未完成的电脑机箱改装而设计的。我为此感到难过,因为它只是坐在那里等待有用。这是一个14英寸乘14英寸的正方形,因此刚好超过一个平方英尺。不幸的是,它也是该项目的唯一材料,我不知道在哪里可以找到价格合理的优质资源。我希望对此有指导意义的读者能提供有关此问题的见解(以便我可以对此进行更新)。
我是圈子的粉丝,并且由于托盘会成弧形移动,因此我决定建立一个基础在圈子上(它是一个双关语,我爱双关语)。主要尺寸基于材料限制,因此通过查看下图即可轻松看到整个结构的一般尺寸。但是,尺寸也取决于我使用的小玻璃杯的尺寸以及Lynxmotion伺服支架的尺寸(我希望托盘的弯曲度与底座的弯曲度相同,因此看起来像两个相交的半圆)。
我发现,对这样的结构进行原型制作的更简单方法是用硬纸板制作1:1的比例尺(对我来说,这比CAD更快,并且可以为您的设计是否可行提供类似的见解。
步骤3:使用聚碳酸酯
尽管聚碳酸酯是坚固且美观的晶体,因此使用起来相对容易,主要的切割是在带锯上进行的,尽管也可以使用竖锯,钢锯或dremel切割。
我了解到的重要一件事是,您需要使用砂纸打磨。 rp工具和耐心,尤其是在钻大直径孔时。我有一些像样的孔锯,以为会像黄油一样通过。好吧,它确实融化了孔周围的物质,引起轻微的变色和很多头痛。因此,请记住要缓慢进行钻进,不要在钻孔时施加太大的压力,以免冷却。
步骤4:托盘臂
托盘臂由一块带孔的聚碳酸酯制成,该孔可使眼镜固定在其2/3位置。每个孔的下方都贴有接触开关,以便Arduino感应到玻璃的存在(我们现在不想浪费酒了)。
托盘臂由以下材料制成:
1 x Lynxmotion“ L”连接器支架
(www.robotshop.ca/lynxmotion-connector-bracket-asb-06b-3.html)
1 x Lynxmotion长“ C”伺服支架
(www.robotshop.ca/aluminum- long-c-servo-bracket-asb-05-3.html)
1 x Lynxmotion多用途伺服支架
(www.robotshop.ca/lynxmotion-aluminum-multi-purpose-servo-3.html )
1 x Hitec HS-645MG伺服器,虽然便宜的HS-422也可以。
(www.robotshop.ca/hitec-hs422-servo-motor.html)
4 x Small Snap带手柄的动作开关。我从All Electronics(一家大型在线商店)(www.allelectronics.com/make-a-store/item/SMS-242/SMALL-SNAP-ACTION-SWITCH-W/-LEVER)获得了价格便宜的廉价接触传感器。/1.html)
1英尺的多芯电线(需要8股)我得到了这种出色的10股电缆,可用于此类情况。
(www.allelectronics.com/make-a -store/item/10CS22/10-CONDUCTOR-SHIELDED-CABLE-W/-DRAIN/-/1.html)
大多数安装螺钉将在您当地的五金店提供。我使用了支架套件中的一些螺母,螺钉和螺栓。
第5步:酒容纳模块
这是迄今为止构建中最困难的部分。实际上,我仍然对性能不满意(主要是体积流量)。问题在于我选择通过重力来驱动液体。我不想通过增加动力泵来增加该项目的成本和难度,因此我选择了更简单的方法。
它如何运作?基本上,伺服机构会调整管子现有端(喷嘴)的高度。当管的末端降低到容器的液位以下(类似于水位)时,来自液体重量的压力会将其自身推出。要停止流动,只需将末端提高到液位以上即可。在不经历其流体动力学方面的情况下,流速完全取决于容器中液体的垂直高度。
这会造成严重的限制。要获得更高的流速,我需要更高的液位,这又意味着一种将管的存在端也提高到该水平以上的方法。简单来说,我想要的流量越大,分配管就必须越长。那不是我想要的东西,因为我希望使用更紧凑的设计。最后,我决定牺牲体积来牺牲流速。
容器
我用了一个Voss水壶,我从当地的Shopper‘s Drugs拿起。它的体积为1L,非常简单。一般容量为1L的任何瓶子都应该使用。 Voss瓶特别好,因为瓶盖又大又平,使安装支架变得轻而易举。
点胶器
点胶器由标准伺服器制成,带有两个眼钩和9英寸长的软管。分配器的机制在很大程度上取决于您的个人设置,但是有一些需要注意的地方。确保将管的颈部浸入到容器的最低点以下(参见图片)。这样可确保在喷嘴向上时,虹吸作用不会被回流产生的气泡中断。
步骤6:控制面板
控制面板允许您选择饮料。我有一个非常基本的设置,带有LED和一个可供选择的锅。如果您优化使用的输出引脚(这是我没时间用之前的原始计划),那么您可以变得更有创造力并使用LCD。
面板由以下材料制成:
1 x小项目框-我有我的是很久以前从Radio Shack那里买来的,但是All Electronics有很多选择
(www.allelectronics.com/make-a-store/category/219/Enclosures/1.html)
1 x Linear-锥形电位器-我使用的是锅,因为它是我周围的东西,我认为它的输入不错,但滑动锅可能更直观。
我用的东西(www.allelectronics.com/make-a-store/item/LTP-15M/15M-LINEAR-POTENTIOMETER/1.html)
滑锅(www.allelectronics.com/make-a-store/item/SP-20K/20K-LINEAR-SLIDE-POT-OPEN -FRAME/1.html)
3个明亮的LED-这些只是指示饮料选择的一种很好而简单的方法,我将它们安装在控制面板中,但是如果连接它们,它会更凉爽到容器模块上(也许旁边标有液体类型)。我还选择了更昂贵的金属安装座。
(www.allelectronics.com/make-a-store/item/IND-13B/5MM-ULTRA-BRIGHT-LED-W/METAL-CASE- BLUE/1.html)
1个按钮开关-只需一个简单的启动开关,即可让BarBot知道您已经准备好。
(www.allelectronics.com/make-a-store/item/PB- 138/SPST-NO-PUSHBUTTON-RED/-/1.html)
您应该对用户控件很有创意。例如,您可以将LED本身安装在分配模块上,并用液体标记它们。我之所以选择使用项目框,是因为我周围有几个。在焊接和电路布局方面,我是一个业余爱好者,因此相当混乱。
第7步:与Arduino接口
由于我是的初学者,因此将简要介绍本部分。 AVR编程,所以我仅能给您提示和技巧。确保您具有最新版本的编译器(0018),以便您的伺服库是最新的。我已经上传了草图,但请记住,许多变量已设置为我的特定条件(伺服角度,浇注时间等)。您将必须进行设置的实验来确定自己的设置。
当我计划将Arduino用于其他项目(可能是受跟踪的机器人:D)时,所有的布线都由跳线和便宜的面包板完成。如果您希望该项目永久存在,则可以购买Arduino原型防护板。在这种情况下,您可能还考虑使用BareBones Arduino来节省成本。
我不会详细介绍引脚连接设置,因为我相信大多数熟悉AVR编程的人都会发现编码本身非常简单。对于那些刚接触Arduino的人,我认为探索我的编码并亲自了解它的感觉会更加有趣。 Arduino网站是语法等方面的大量参考资料。
步骤8:将它们放在一起
本节将介绍我在构建此BarBot的过程中遇到的一些小问题以及最后的修饰。和往常一样,图片比无尽的段落更能使我更加公正。
第9步:事后
好吧,我确实获得了第一名整个展览会使我对这个项目感到非常满意。我喜欢解释机器人的工作原理和目的,并得到他们的反应。我认为更多的前瞻性可以使构建过程更加顺畅,但是一路走来,试错法有所帮助。我会将这种类型的项目推荐给对机器人感兴趣的任何狂热的建造者。
责任编辑:wv
-
控制器
+关注
关注
112文章
16374浏览量
178157 -
Arduino
+关注
关注
188文章
6470浏览量
187140
发布评论请先 登录
相关推荐
怎么自己搭建云电脑,怎么自己搭建云电脑的教程,云电脑是什么呢以及怎么链接
如何训练自己的AI大模型
PGA281建立时间过长怎么解决?
InRouter与Juniper SRX如何建立IPSec隧道配置?
ESP如何在通电时与服务器建立连接?
PyTorch如何训练自己的数据集
如何使用PyTorch建立网络模型
建立freertos的stm32工程,用CMSIS_OS做为应用的接口一直实现不了为什么?
STemWIN32建立touch用touch_calibrate正常但建立BUTTON无响应怎么解决?
如何制作自己的Arduino电容计

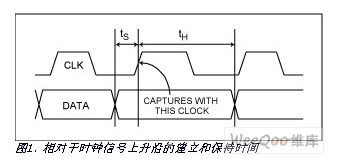
高速数模转换器(DAC)的建立和保持时间





 工商网监
工商网监
评论